
拖地机器人的导航装置.pdf

鹏飞****可爱


1/5
2/5
3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
拖地机器人的导航装置.pdf
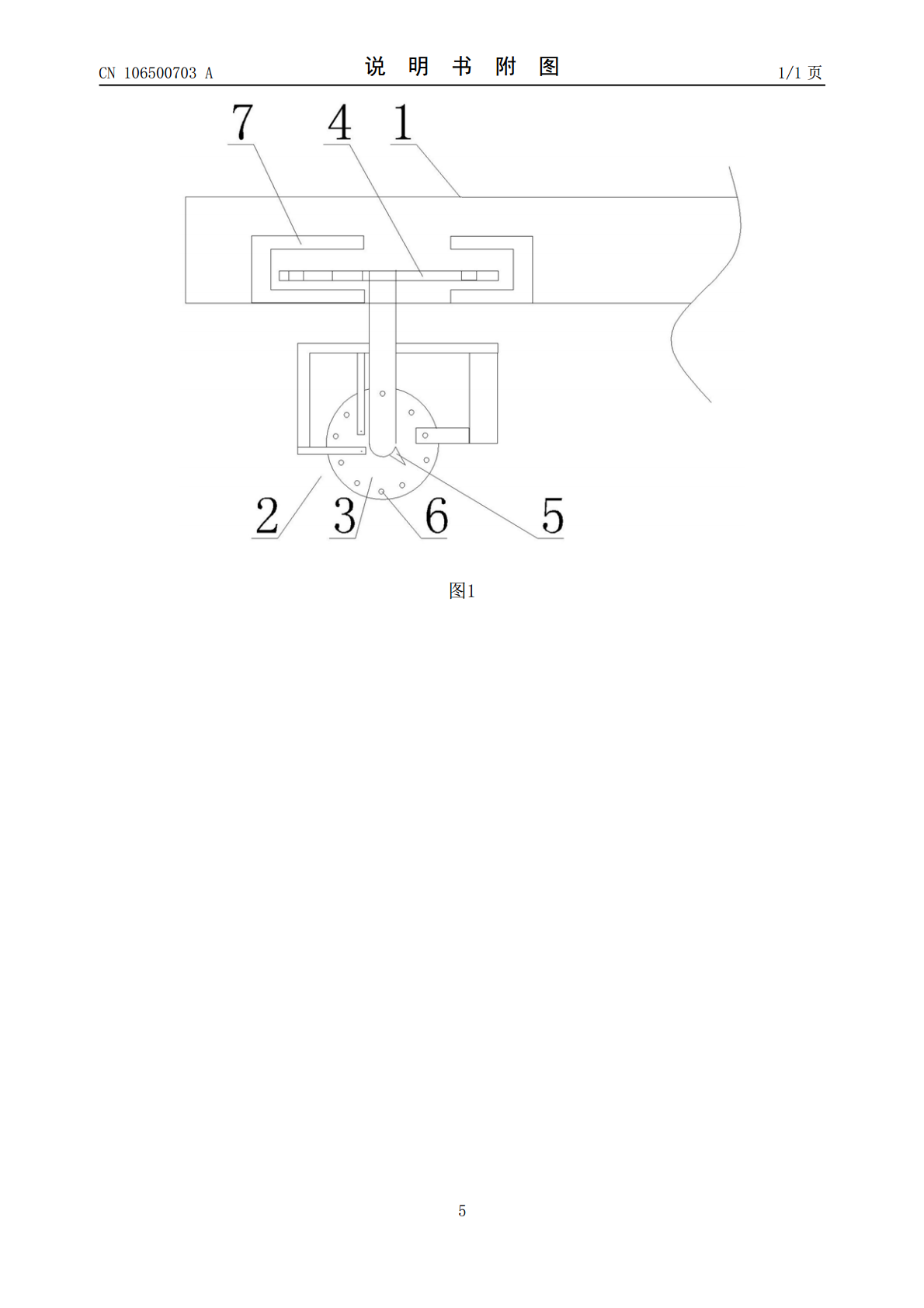
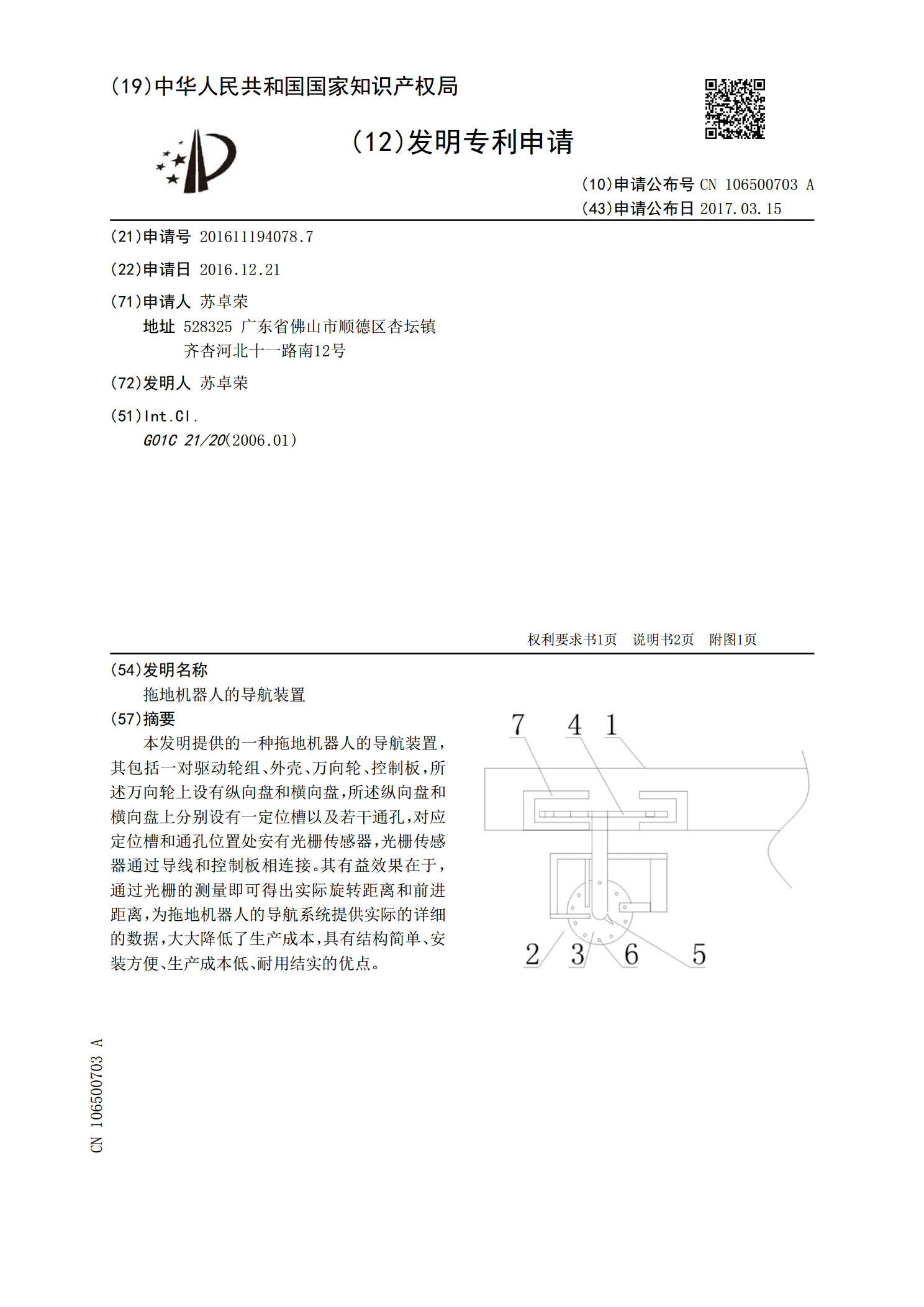
本发明提供的一种拖地机器人的导航装置,其包括一对驱动轮组、外壳、万向轮、控制板,所述万向轮上设有纵向盘和横向盘,所述纵向盘和横向盘上分别设有一定位槽以及若干通孔,对应定位槽和通孔位置处安有光栅传感器,光栅传感器通过导线和控制板相连接。其有益效果在于,通过光栅的测量即可得出实际旋转距离和前进距离,为拖地机器人的导航系统提供实际的详细的数据,大大降低了生产成本,具有结构简单、安装方便、生产成本低、耐用结实的优点。
机器人导航方法、装置、机器人及存储介质.pdf
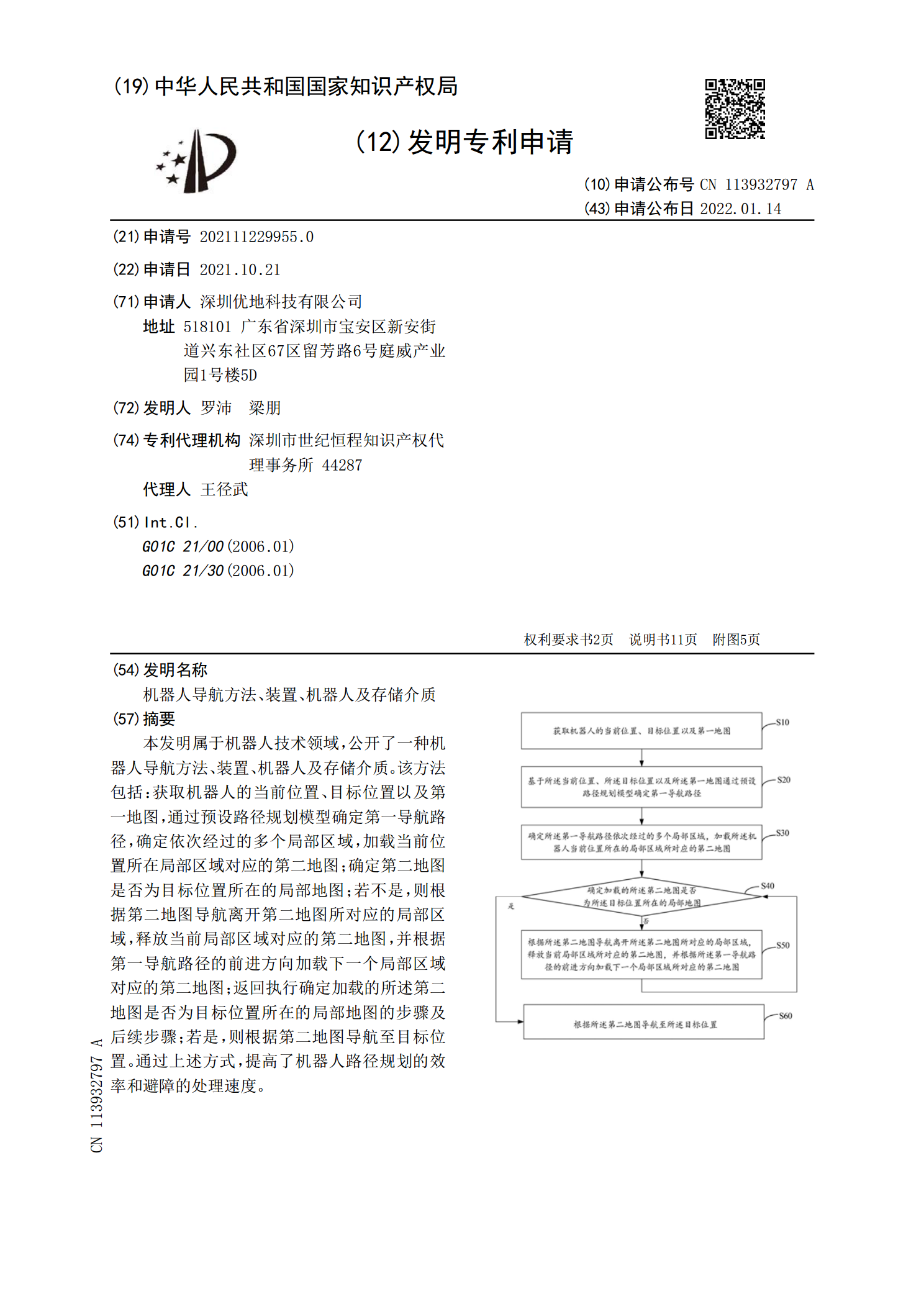
本发明属于机器人技术领域,公开了一种机器人导航方法、装置、机器人及存储介质。该方法包括:获取机器人的当前位置、目标位置以及第一地图,通过预设路径规划模型确定第一导航路径,确定依次经过的多个局部区域,加载当前位置所在局部区域对应的第二地图;确定第二地图是否为目标位置所在的局部地图;若不是,则根据第二地图导航离开第二地图所对应的局部区域,释放当前局部区域对应的第二地图,并根据第一导航路径的前进方向加载下一个局部区域对应的第二地图;返回执行确定加载的所述第二地图是否为目标位置所在的局部地图的步骤及后续步骤;若是
拖地装置、清洁机器人及运动控制方法.pdf
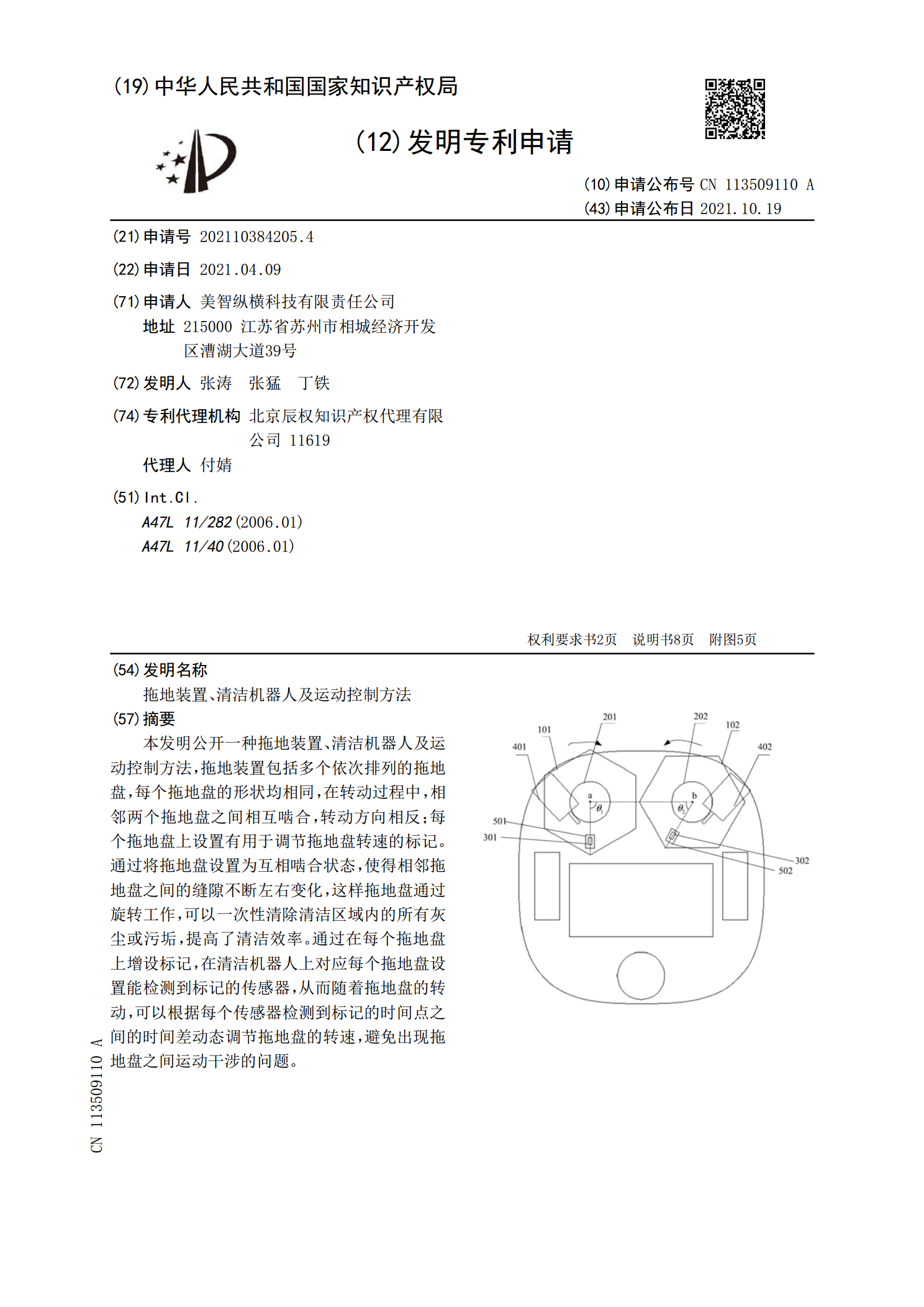
本发明公开一种拖地装置、清洁机器人及运动控制方法,拖地装置包括多个依次排列的拖地盘,每个拖地盘的形状均相同,在转动过程中,相邻两个拖地盘之间相互啮合,转动方向相反;每个拖地盘上设置有用于调节拖地盘转速的标记。通过将拖地盘设置为互相啮合状态,使得相邻拖地盘之间的缝隙不断左右变化,这样拖地盘通过旋转工作,可以一次性清除清洁区域内的所有灰尘或污垢,提高了清洁效率。通过在每个拖地盘上增设标记,在清洁机器人上对应每个拖地盘设置能检测到标记的传感器,从而随着拖地盘的转动,可以根据每个传感器检测到标记的时间点之间的时间
一种机器人导航装置.pdf
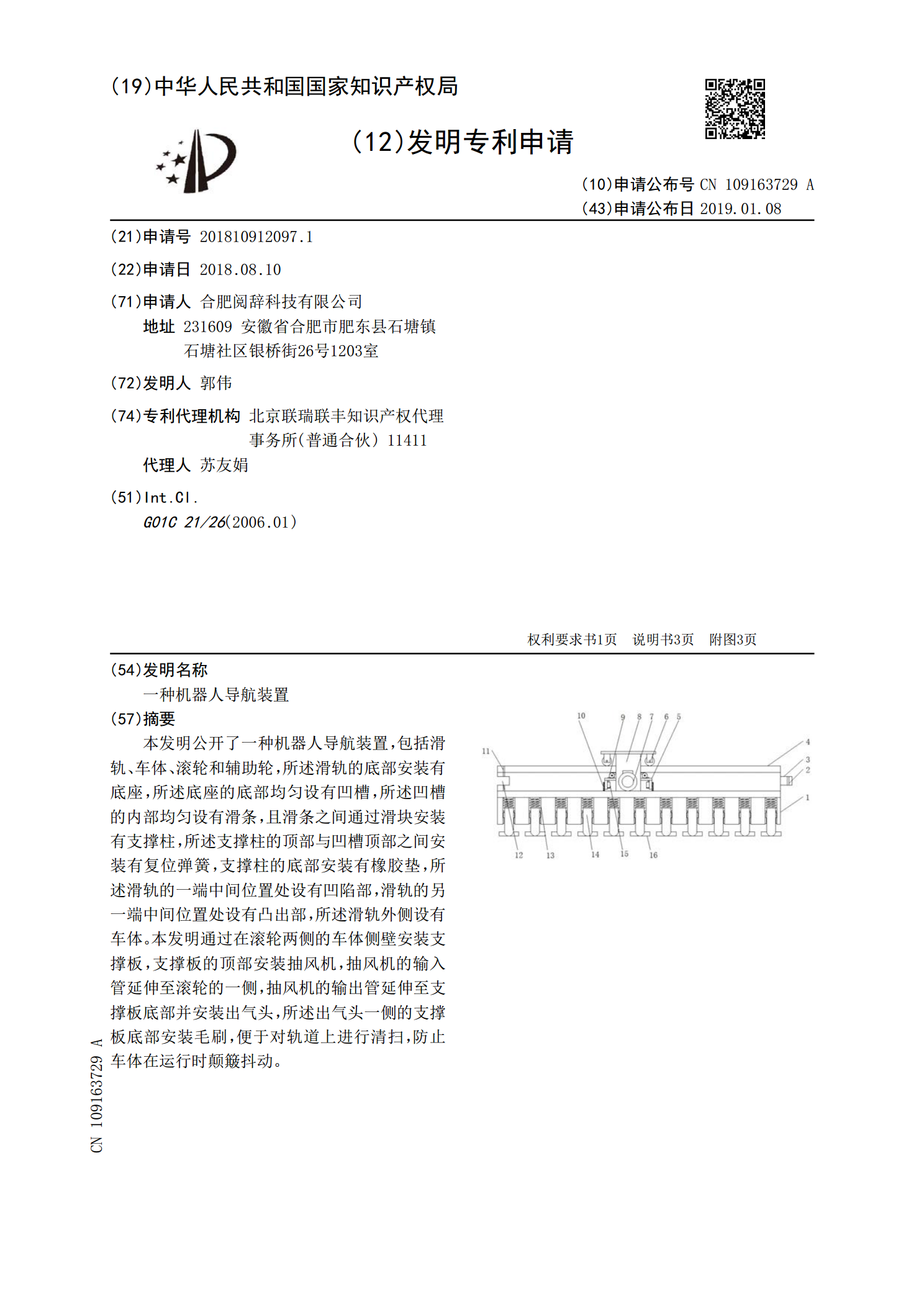
本发明公开了一种机器人导航装置,包括滑轨、车体、滚轮和辅助轮,所述滑轨的底部安装有底座,所述底座的底部均匀设有凹槽,所述凹槽的内部均匀设有滑条,且滑条之间通过滑块安装有支撑柱,所述支撑柱的顶部与凹槽顶部之间安装有复位弹簧,支撑柱的底部安装有橡胶垫,所述滑轨的一端中间位置处设有凹陷部,滑轨的另一端中间位置处设有凸出部,所述滑轨外侧设有车体。本发明通过在滚轮两侧的车体侧壁安装支撑板,支撑板的顶部安装抽风机,抽风机的输入管延伸至滚轮的一侧,抽风机的输出管延伸至支撑板底部并安装出气头,所述出气头一侧的支撑板底部安

一种基于手机控制的视觉导航家用拖地机器人.pdf
本发明涉及一种基于手机控制的视觉导航家用拖地机器人,包括拖地机器人本体和基站,所述拖地机器人本体上可拆卸安装有智能手机,所述智能手机内安装有智能手机APP,所述智能手机APP与所述智能手机的摄像模块以及所述拖地机器人本体的控制板通信连接;所述智能手机APP用于控制所述摄像模块采集周围环境图像,基于周围环境图像生成运动控制指令,并通过手机蓝牙模块向控制板发送运动控制指令,从而实现拖地机器人的智能拖地。本发明可以借助二手智能手机的摄像头及处理芯片能力,完成拖地机器人的视觉导航工作,降低了拖地机器人的硬件成本,