
一种连体锤自动化打磨系统.pdf

努力****爱敏


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种连体锤自动化打磨系统.pdf
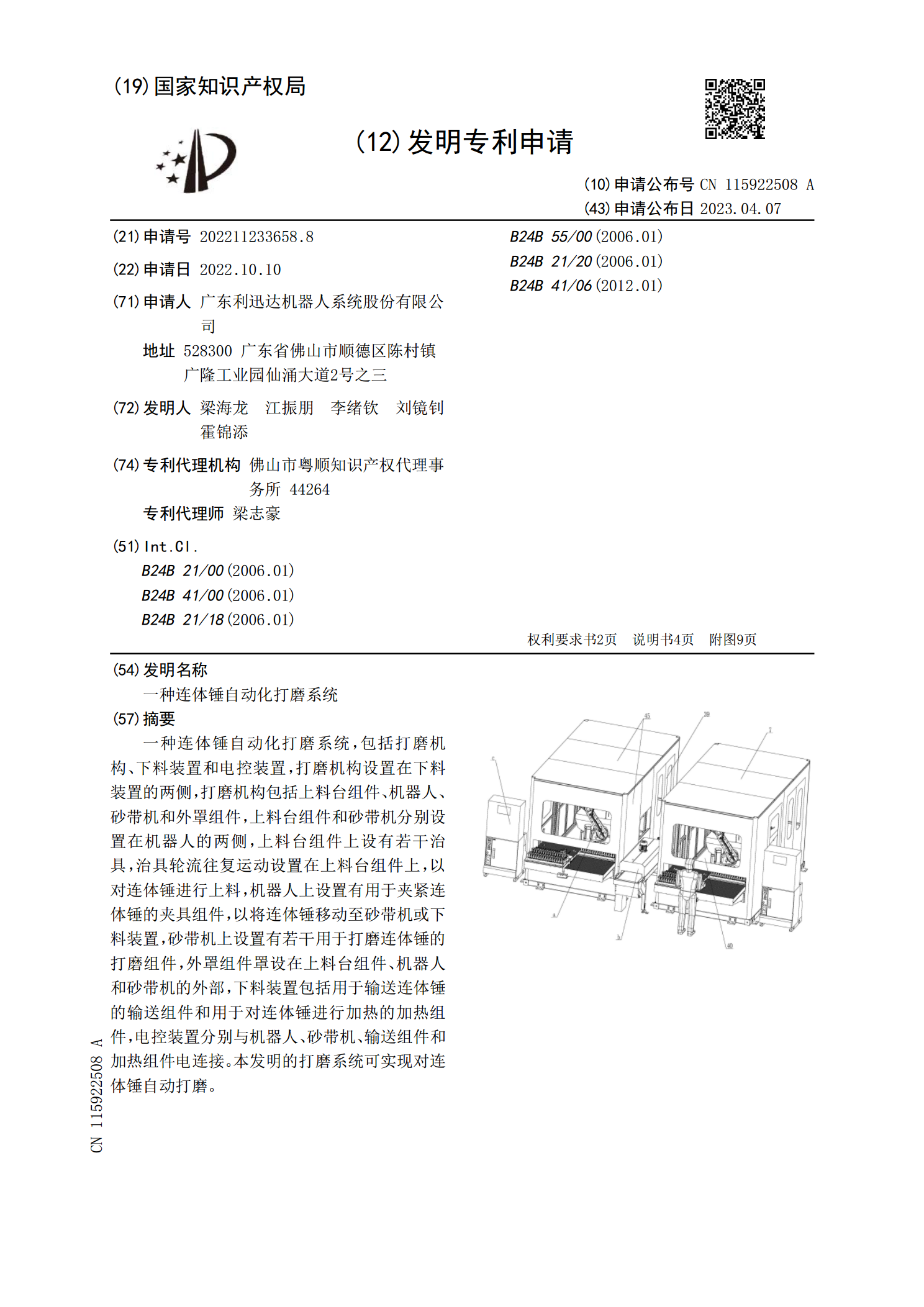
一种连体锤自动化打磨系统,包括打磨机构、下料装置和电控装置,打磨机构设置在下料装置的两侧,打磨机构包括上料台组件、机器人、砂带机和外罩组件,上料台组件和砂带机分别设置在机器人的两侧,上料台组件上设有若干治具,治具轮流往复运动设置在上料台组件上,以对连体锤进行上料,机器人上设置有用于夹紧连体锤的夹具组件,以将连体锤移动至砂带机或下料装置,砂带机上设置有若干用于打磨连体锤的打磨组件,外罩组件罩设在上料台组件、机器人和砂带机的外部,下料装置包括用于输送连体锤的输送组件和用于对连体锤进行加热的加热组件,电控装置分

一种工业机器人应用羊角锤自动化打磨抛光装置.pdf
本发明涉及打磨抛光技术领域,且公开了一种工业机器人应用羊角锤自动化打磨抛光装置,解决了目前羊角锤人工打磨效率低,打磨效果差,铁屑和烟尘落于车间污染环境,以及打磨砂带更换不便的问题,其包括气控平衡地轨,所述气控平衡地轨上端设置有打磨抛光机构,本发明利用六轴工业机器人完全替代人工全自动一次性完成羊角锤所有工序的打磨抛光工作,打磨效率高且打磨效果好;通过伸缩杆伸缩带动安装板扇形转动,使得打磨电机带动主动砂带轮调节与从动砂带轮之间的距离,这样可以将易损打磨砂带快速进行更换更新;通过除烟尘机构、除铁屑机构以及伸出机

自动化模具打磨系统.pdf
本发明涉及一种自动化模具打磨系统,包括:模具打磨设备,设置在车体的外壳内,用于在接收到授权用户信号时,自动执行模具打磨操作以实现对汽车的钥匙的重塑;钥匙推送设备,与所述模具打磨设备连接,用于在所述模具打磨设备完成打磨后,将打磨获得的重塑的钥匙推送到车体的外壳之外。本发明的自动化模具打磨系统方便实用,结构简单。由于在汽车钥匙被锁在车内或者车主未携带钥匙时,对车体周围的成像图像进行授权人体检测,在检测成功时方授权使用设置在车体的外壳内的模具打磨设备实现汽车的钥匙的重塑以及使用钥匙推送设备将打磨获得的重塑的钥匙

一种模具打磨自动化清洗系统.pdf
本发明公开了一种模具打磨自动化清洗系统,包括手持打磨机,在所述手持打磨机的一侧设有滑槽,所述滑槽内设有铰接座,所述铰接座铰接有支撑杆,所述支撑杆中部设有折叠铰轴,所述支撑杆的底端通过旋转块连接有底座,所述底座的底部设有电磁铁,所述底座的上部环绕设有多个吸尘口,所述吸尘口均与吸尘管连通,在吸尘口内设有铁丝过滤网;在所述手持打磨机的另一侧设有支架,在支架上设有雾化器,所述雾化器上侧连接有进水管,所述雾化器下侧设有雾化除尘管,所述雾化除尘管的管头与手持打磨机的打磨头对应设置。

一种自动化连续工作锤.pdf
一种自动化连续工作锤。涉及一种机械工具,尤其涉及一种自动化连续工作锤。可有效避免安全隐患、提高了操作的安全性,并且能够实现对目标钉子自动敲击。包括手柄和锤体,所述锤体的内部中空、形成容置腔,所述容置腔内设有驱动组件和配重块,所述配重块可相对容置腔滑动,所述驱动组件用于驱使配重块做直线往复运动,所述驱动组件包括弹簧和一对驱动机构,所述弹簧固定的抵在容置腔的侧壁与配重块之间,一对所述驱动机构均连接在配重块远离弹簧的一端,一对所述驱动机构均包括支架、滚轮和摩擦带。本发明整体上具有可大大降低工作人员体力消耗、有效