
一种工件姿态自动调整装置.pdf

一条****发啊

1/10
2/10
3/10
4/10

5/10
6/10
7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种工件姿态自动调整装置.pdf
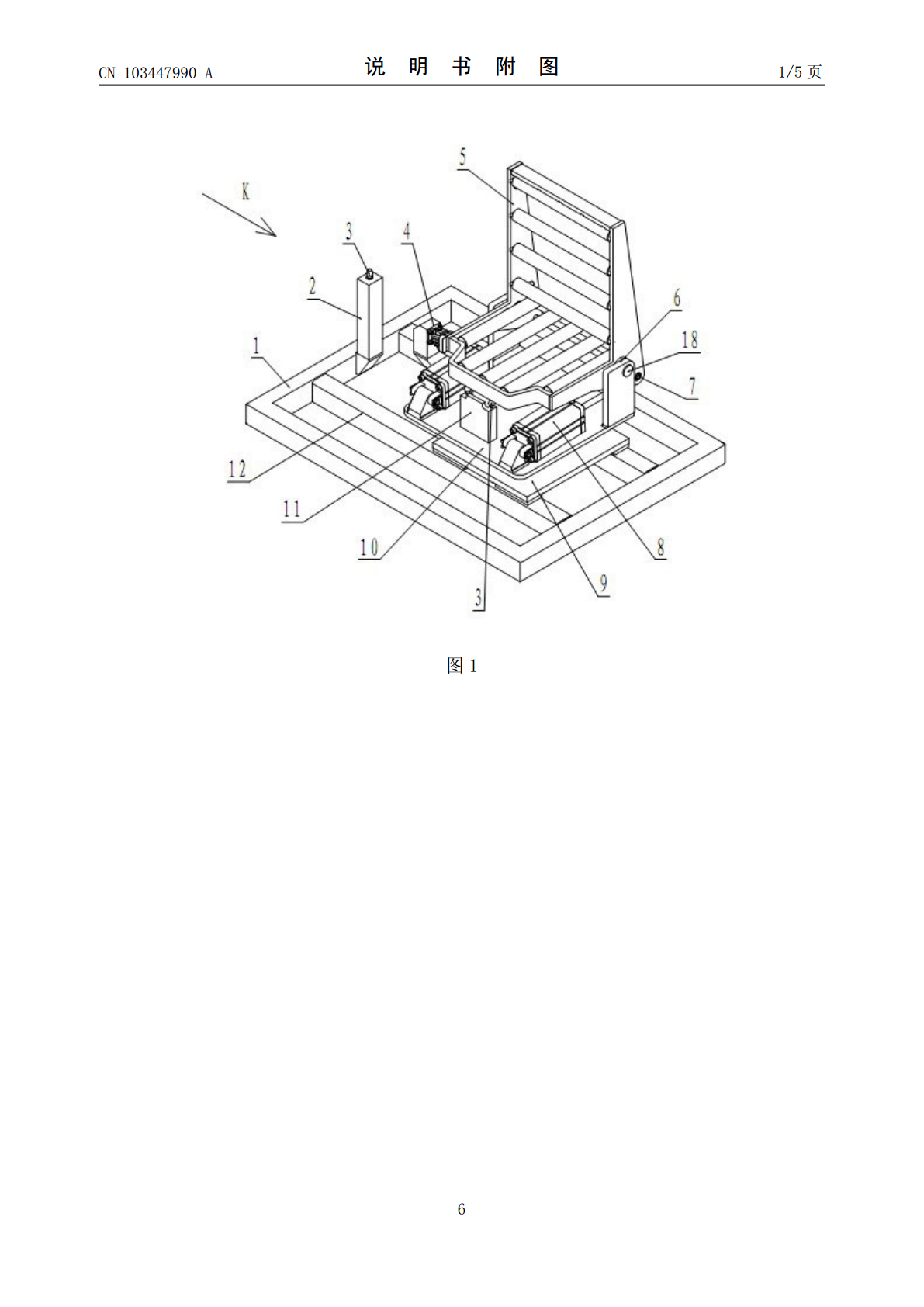
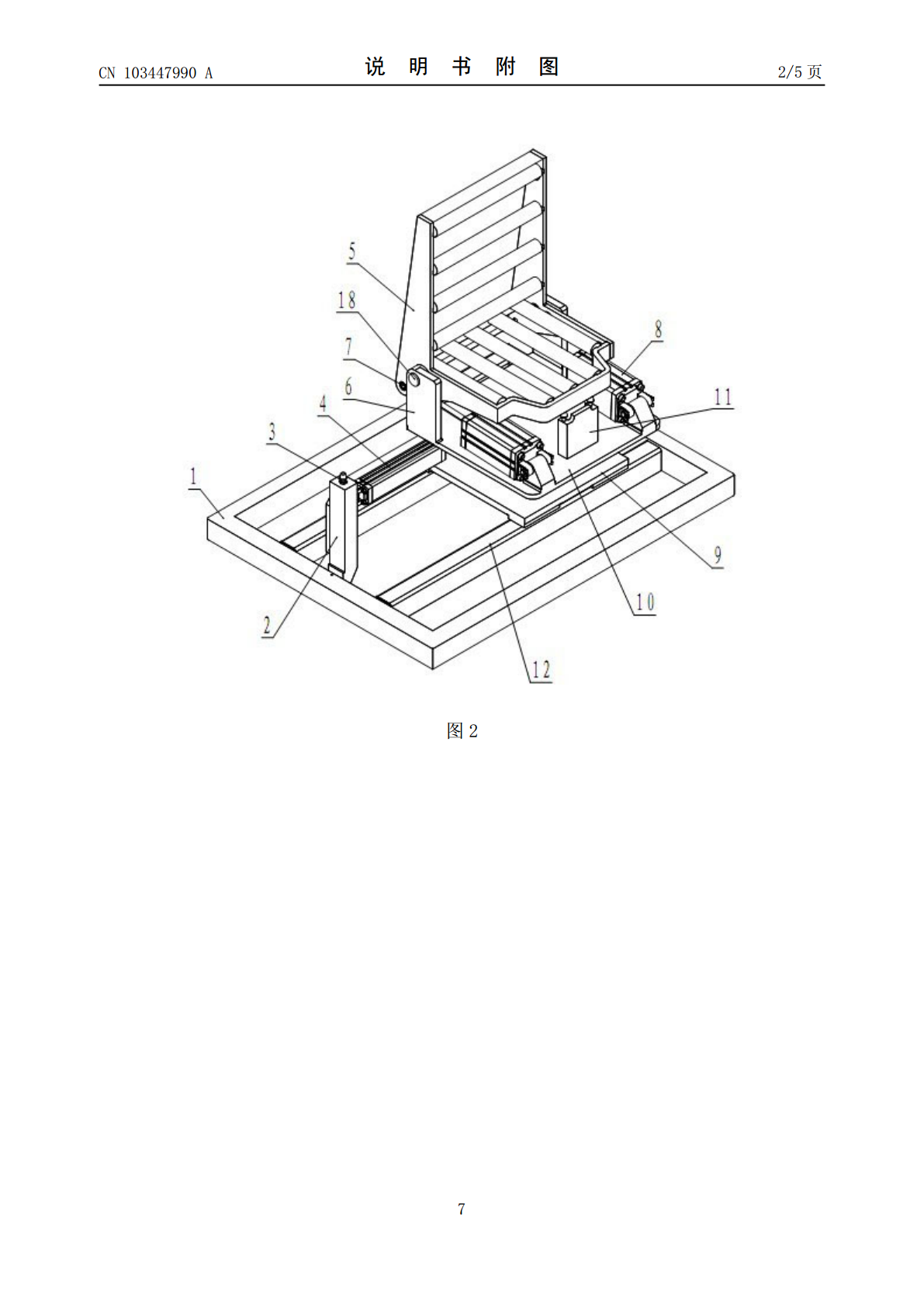
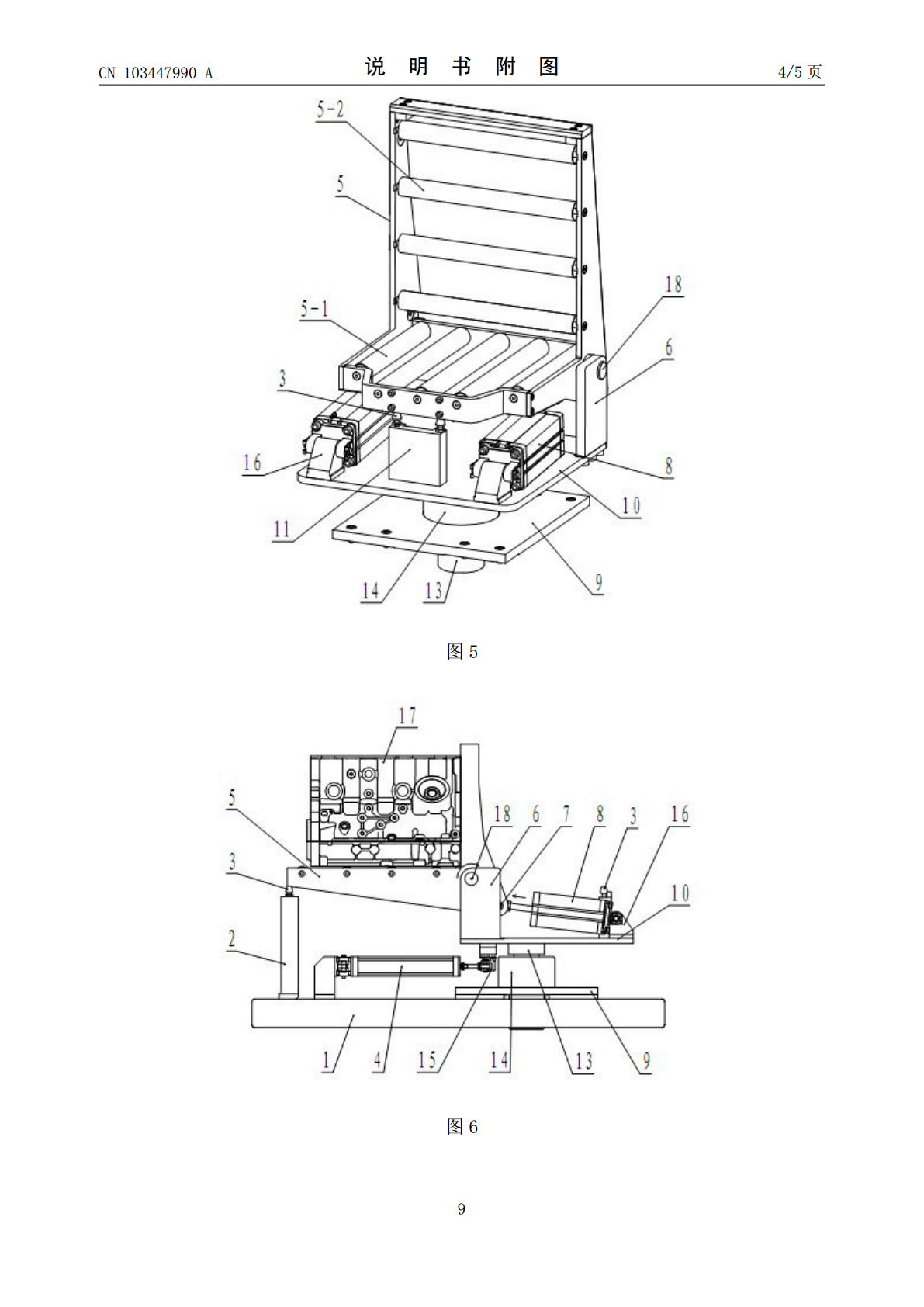
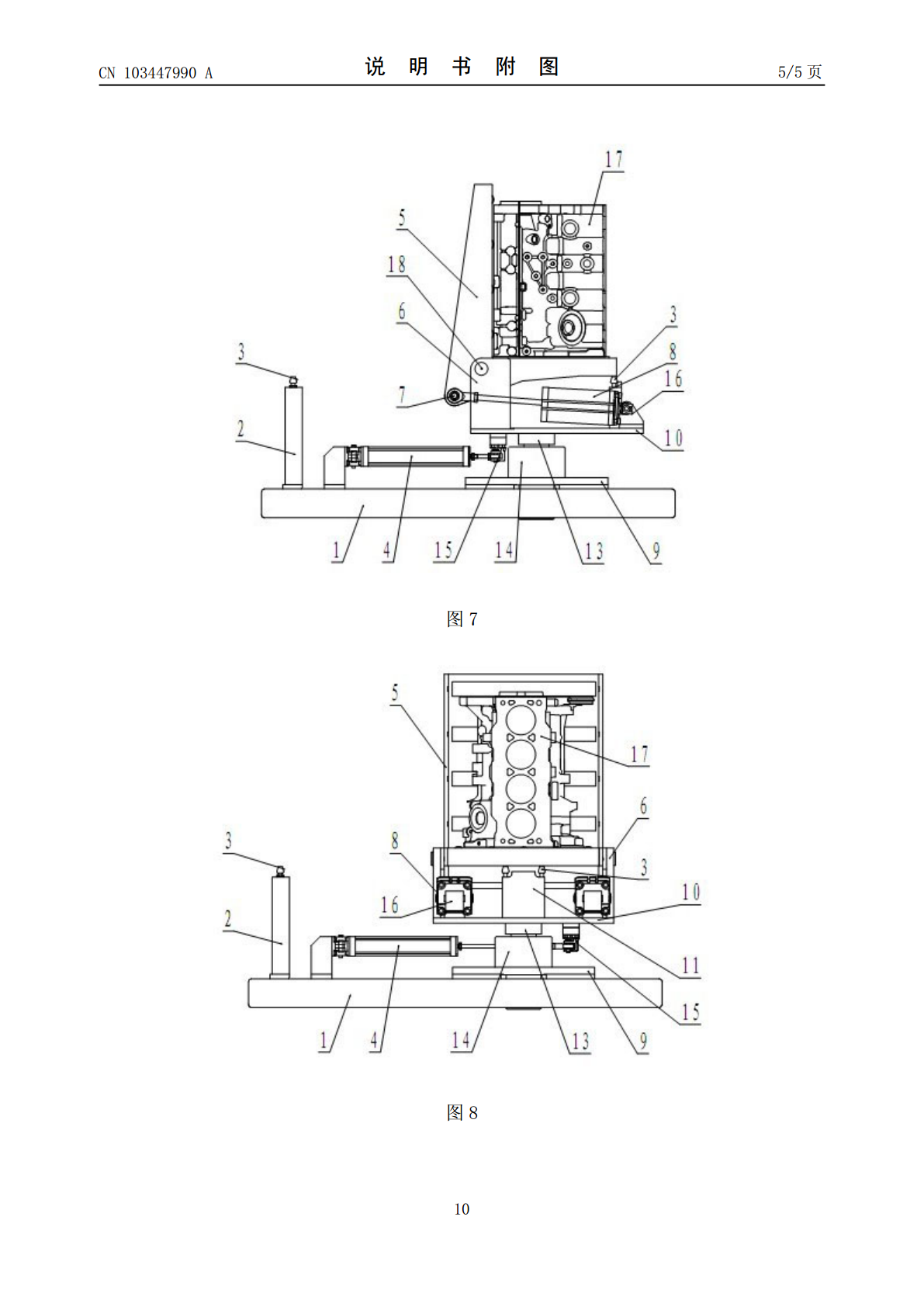
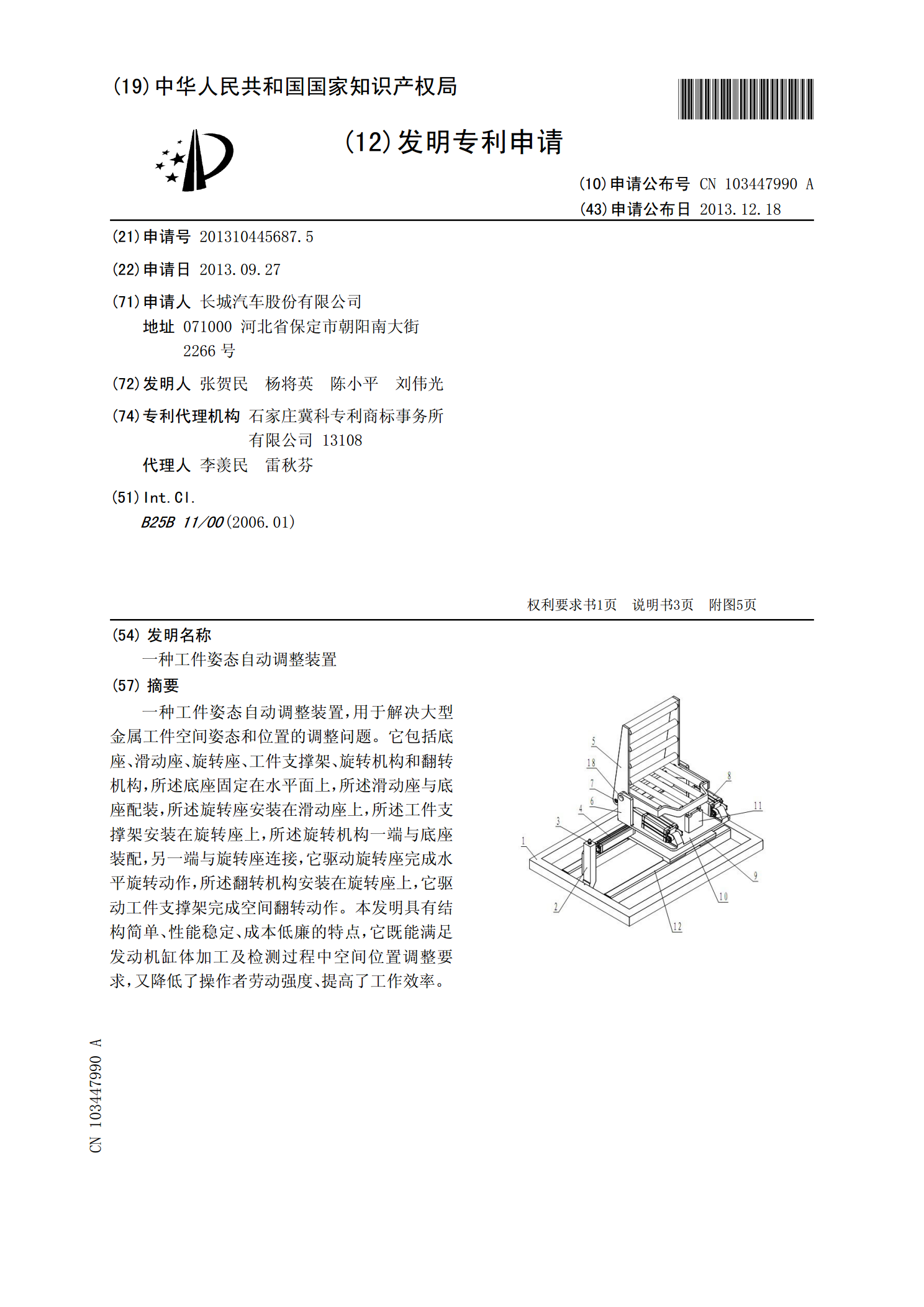
一种工件姿态自动调整装置,用于解决大型金属工件空间姿态和位置的调整问题。它包括底座、滑动座、旋转座、工件支撑架、旋转机构和翻转机构,所述底座固定在水平面上,所述滑动座与底座配装,所述旋转座安装在滑动座上,所述工件支撑架安装在旋转座上,所述旋转机构一端与底座装配,另一端与旋转座连接,它驱动旋转座完成水平旋转动作,所述翻转机构安装在旋转座上,它驱动工件支撑架完成空间翻转动作。本发明具有结构简单、性能稳定、成本低廉的特点,它既能满足发动机缸体加工及检测过程中空间位置调整要求,又降低了操作者劳动强度、提高了工作效

一种用于工件姿态调整的输送装置.pdf
本发明涉及一种用于工件姿态调整的输送装置,包括基板、支架、连接板、带座轴承、回转板、气缸Ⅰ、连接盘、止转杆、护罩、棍子、链条和气缸Ⅱ;支架垂直固定设置在基板对向两侧;支架远离基板的一侧设有回转固定孔和销固定孔;对向两个回转固定孔内侧之间设置有回转轴;棍子内围设置有链轮;支架通过支柱与连接板固定连接;护罩通过螺栓将连接板、支架与支撑板底端面包覆固定连接。护罩上设置有导向条;护罩上表面根据棍子的大小和多少设置有棍子透出孔。本发明的有益效果是:一体化便捷,高效节能,姿态调整精度高,使用范围广。
一种自动调整工件方向的传送装置.pdf
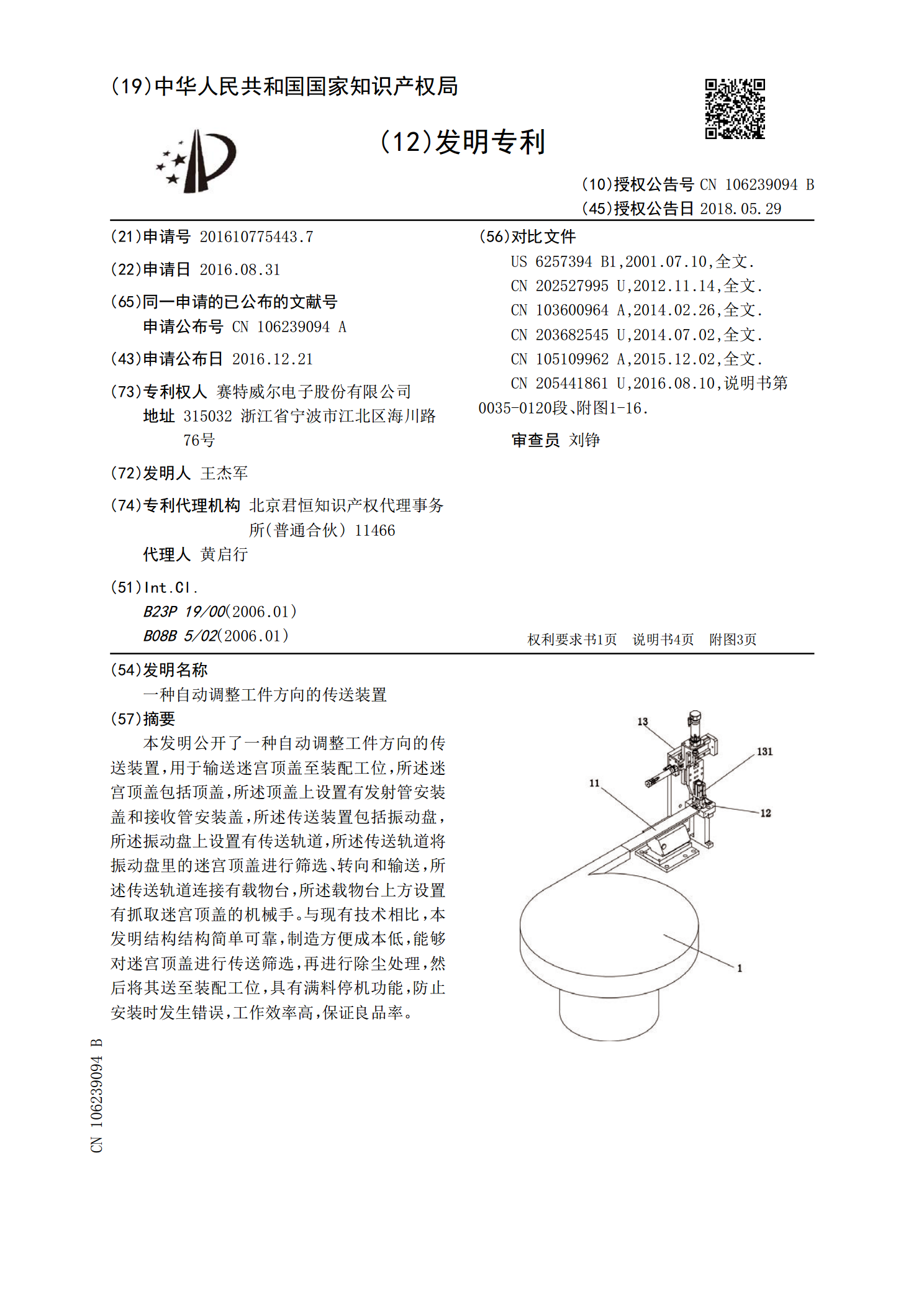
本发明公开了一种自动调整工件方向的传送装置,用于输送迷宫顶盖至装配工位,所述迷宫顶盖包括顶盖,所述顶盖上设置有发射管安装盖和接收管安装盖,所述传送装置包括振动盘,所述振动盘上设置有传送轨道,所述传送轨道将振动盘里的迷宫顶盖进行筛选、转向和输送,所述传送轨道连接有载物台,所述载物台上方设置有抓取迷宫顶盖的机械手。与现有技术相比,本发明结构结构简单可靠,制造方便成本低,能够对迷宫顶盖进行传送筛选,再进行除尘处理,然后将其送至装配工位,具有满料停机功能,防止安装时发生错误,工作效率高,保证良品率。
一种可自动调整喷嘴与工件距离的喷涂装置.pdf
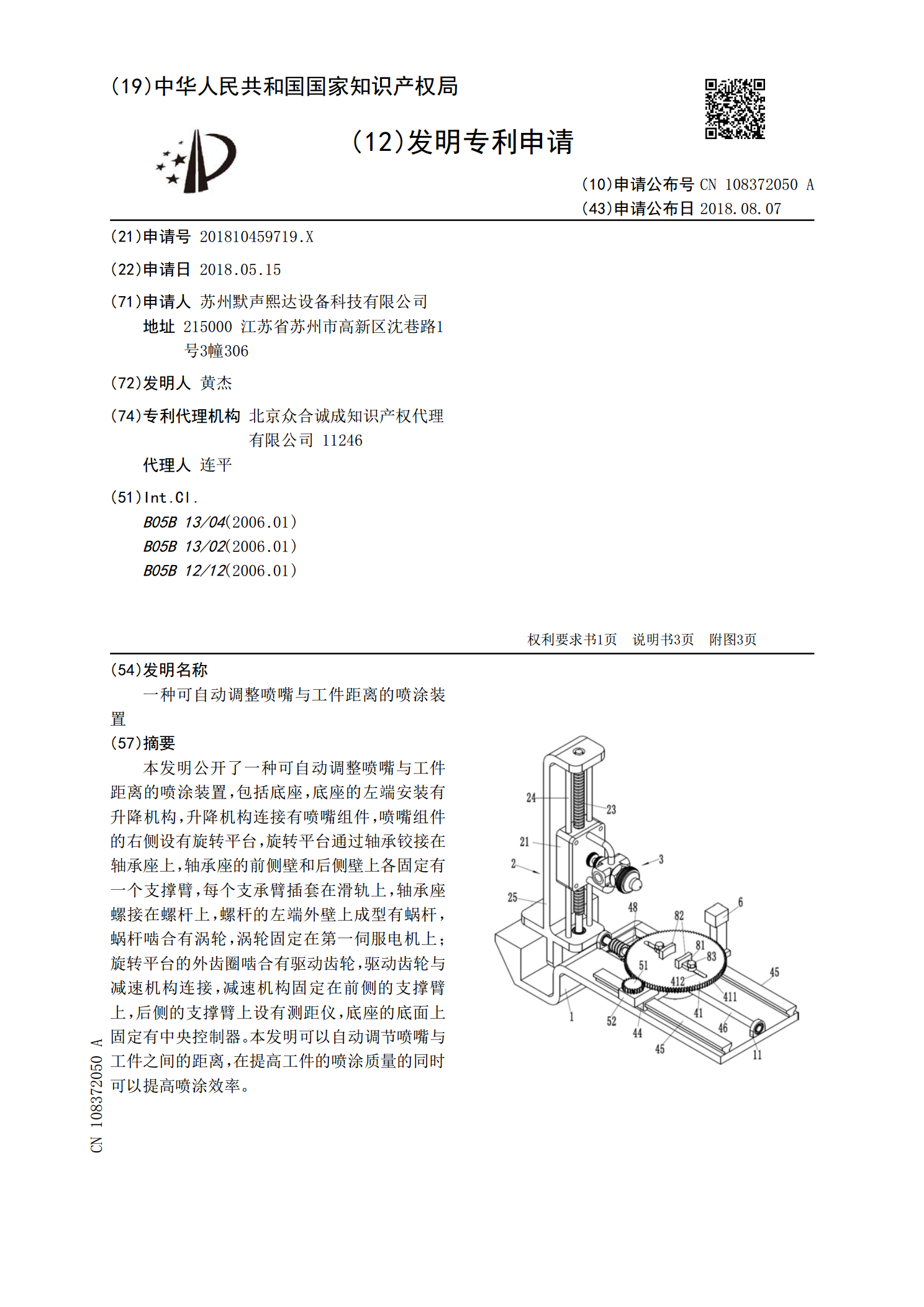
本发明公开了一种可自动调整喷嘴与工件距离的喷涂装置,包括底座,底座的左端安装有升降机构,升降机构连接有喷嘴组件,喷嘴组件的右侧设有旋转平台,旋转平台通过轴承铰接在轴承座上,轴承座的前侧壁和后侧壁上各固定有一个支撑臂,每个支承臂插套在滑轨上,轴承座螺接在螺杆上,螺杆的左端外壁上成型有蜗杆,蜗杆啮合有涡轮,涡轮固定在第一伺服电机上;旋转平台的外齿圈啮合有驱动齿轮,驱动齿轮与减速机构连接,减速机构固定在前侧的支撑臂上,后侧的支撑臂上设有测距仪,底座的底面上固定有中央控制器。本发明可以自动调节喷嘴与工件之间的距离
一种苹果姿态精调装置及姿态调整设备.pdf
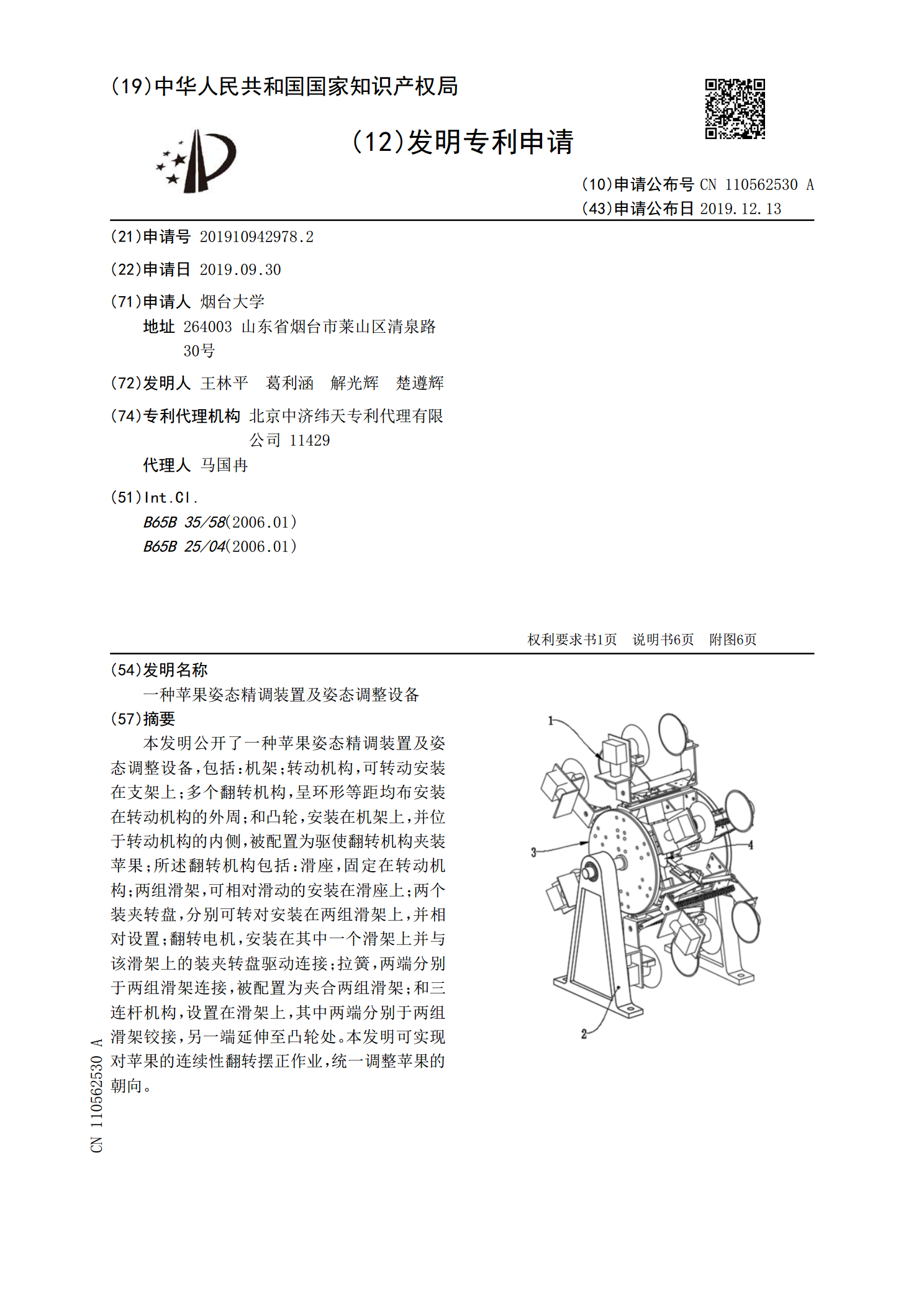
本发明公开了一种苹果姿态精调装置及姿态调整设备,包括:机架;转动机构,可转动安装在支架上;多个翻转机构,呈环形等距均布安装在转动机构的外周;和凸轮,安装在机架上,并位于转动机构的内侧,被配置为驱使翻转机构夹装苹果;所述翻转机构包括:滑座,固定在转动机构;两组滑架,可相对滑动的安装在滑座上;两个装夹转盘,分别可转对安装在两组滑架上,并相对设置;翻转电机,安装在其中一个滑架上并与该滑架上的装夹转盘驱动连接;拉簧,两端分别于两组滑架连接,被配置为夹合两组滑架;和三连杆机构,设置在滑架上,其中两端分别于两组滑架铰