
一种可移动式焊接机械手.pdf

朋兴****en

1/4
2/4
3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种可移动式焊接机械手.pdf
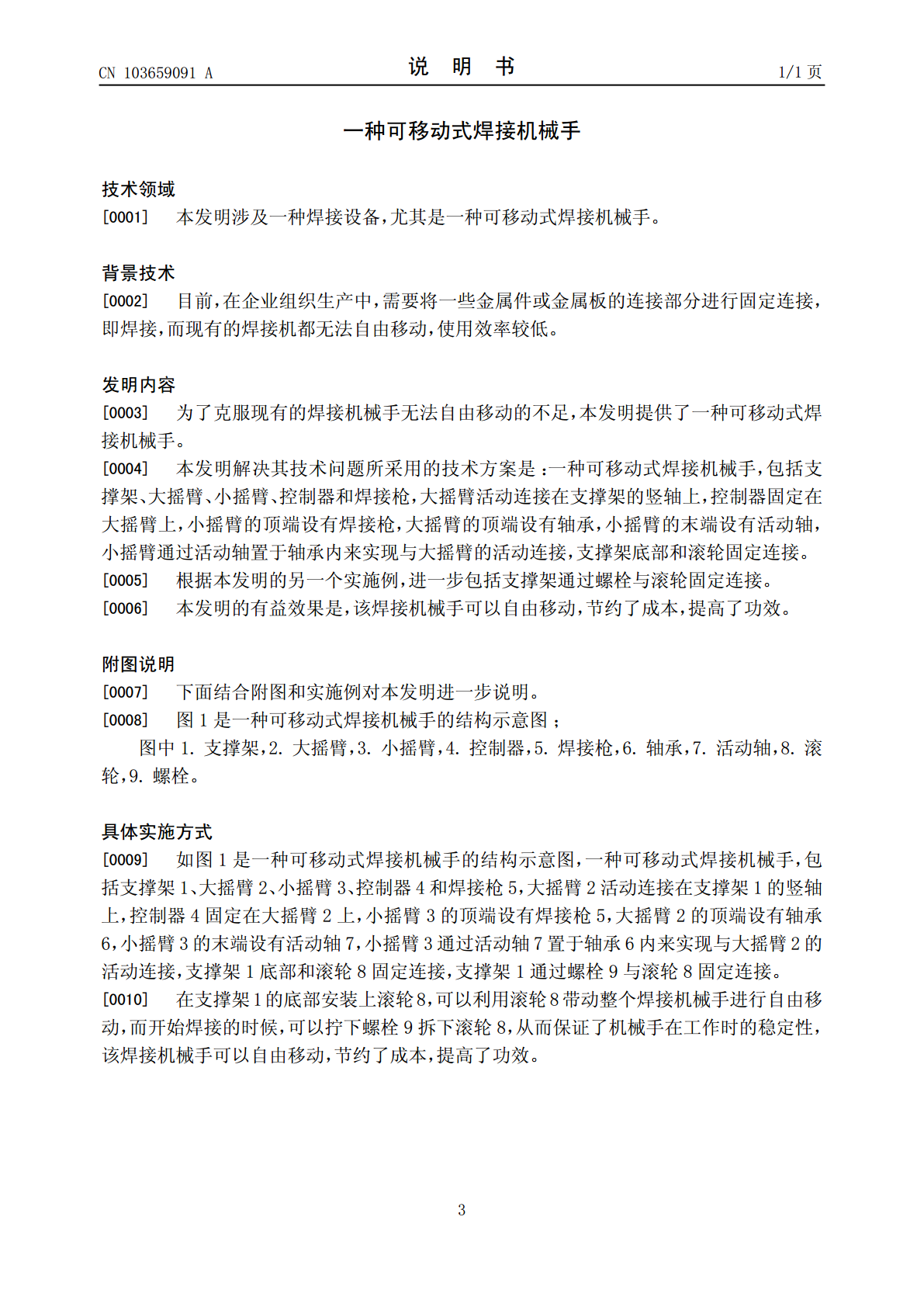
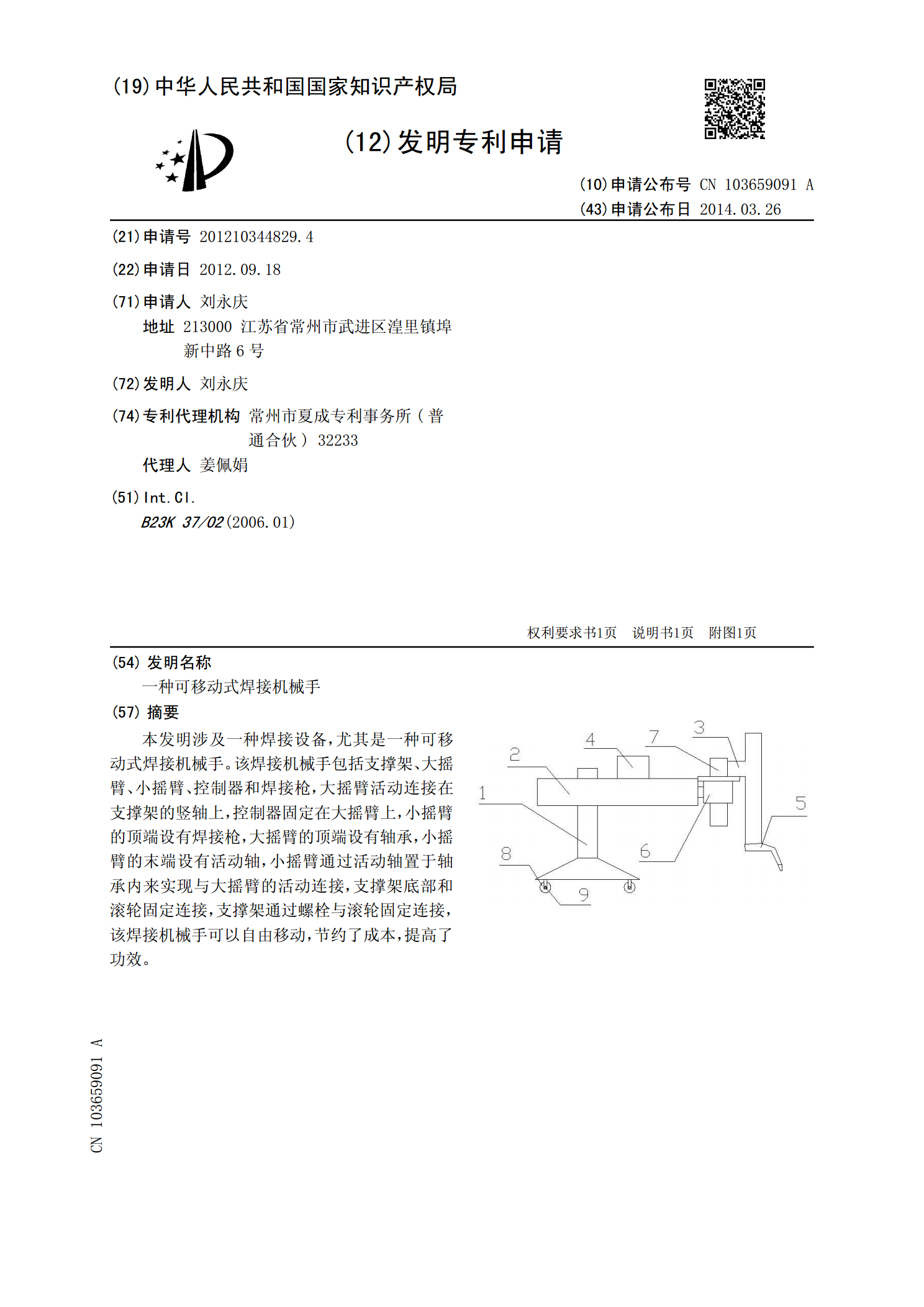
本发明涉及一种焊接设备,尤其是一种可移动式焊接机械手。该焊接机械手包括支撑架、大摇臂、小摇臂、控制器和焊接枪,大摇臂活动连接在支撑架的竖轴上,控制器固定在大摇臂上,小摇臂的顶端设有焊接枪,大摇臂的顶端设有轴承,小摇臂的末端设有活动轴,小摇臂通过活动轴置于轴承内来实现与大摇臂的活动连接,支撑架底部和滚轮固定连接,支撑架通过螺栓与滚轮固定连接,该焊接机械手可以自由移动,节约了成本,提高了功效。

一种可移动式机械手底座.pdf
一种可移动式机械手底座,由底座壳、转盘、滚动轴承、大齿轮、小齿轮、步进电机和控制模块组成,回转心轴通过滚动轴承安装到底座壳上,与转盘相连接,步进电机固定在底座壳的内部,小齿轮安装在步进电机的转轴上,大齿轮安装在回转心轴下端,控制模块安装在底座壳内侧上。本发明把机械手控制的相关模块安装到底座壳的内侧,能有效的缩短连接机械手臂与底座的控制信号线和电源线,便于机械手的移动,并且外观紧凑,回转心轴做成空心轴,便于将手臂上的信号线及电源线穿过以连接到底座内部,避免了导电环的使用,提高了可靠性。
可移动式机械手臂.pdf
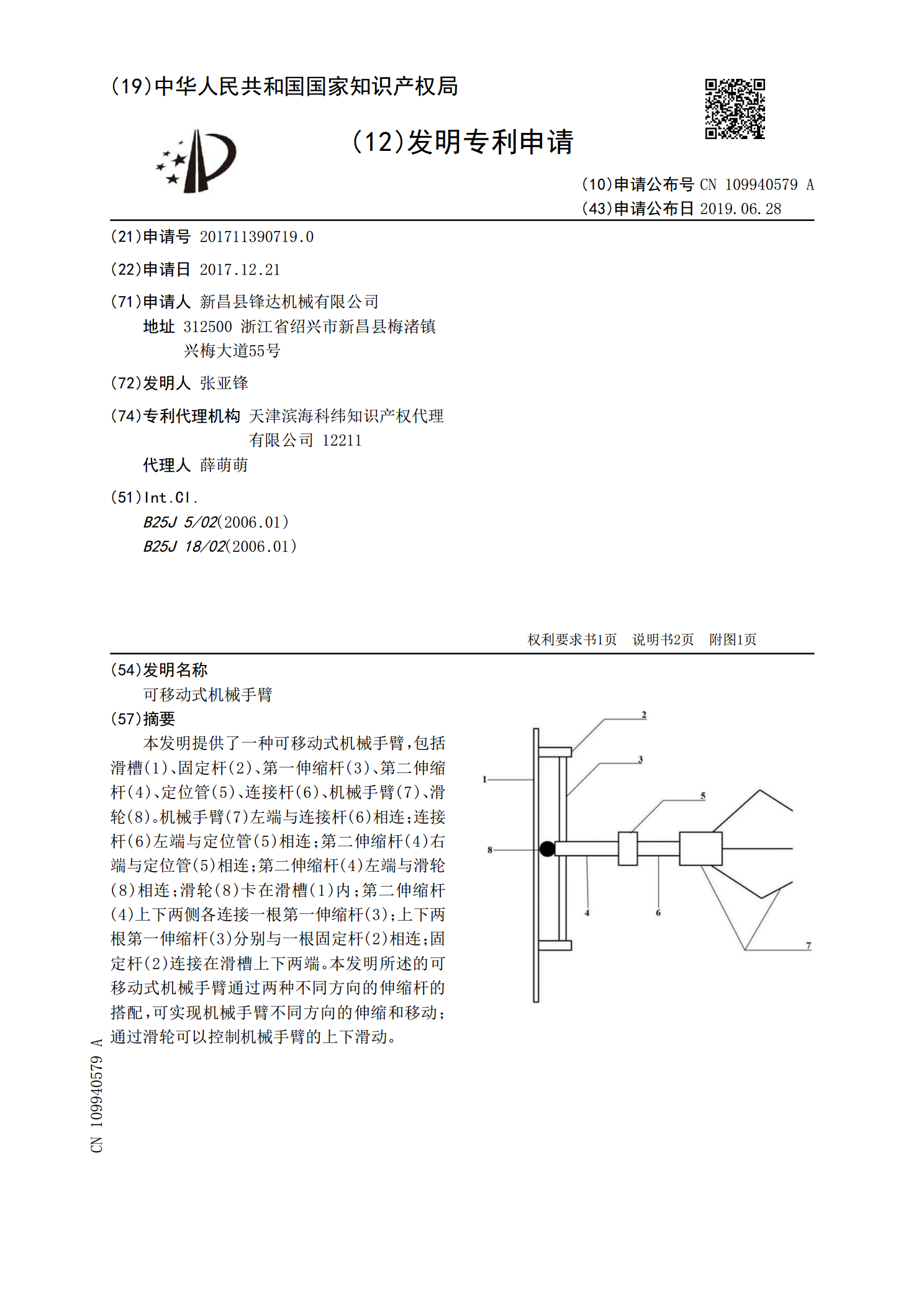
本发明提供了一种可移动式机械手臂,包括滑槽(1)、固定杆(2)、第一伸缩杆(3)、第二伸缩杆(4)、定位管(5)、连接杆(6)、机械手臂(7)、滑轮(8)。机械手臂(7)左端与连接杆(6)相连;连接杆(6)左端与定位管(5)相连;第二伸缩杆(4)右端与定位管(5)相连;第二伸缩杆(4)左端与滑轮(8)相连;滑轮(8)卡在滑槽(1)内;第二伸缩杆(4)上下两侧各连接一根第一伸缩杆(3);上下两根第一伸缩杆(3)分别与一根固定杆(2)相连;固定杆(2)连接在滑槽上下两端。本发明所述的可移动式机械手臂通过两种不
一种可移动式焊接设备.pdf
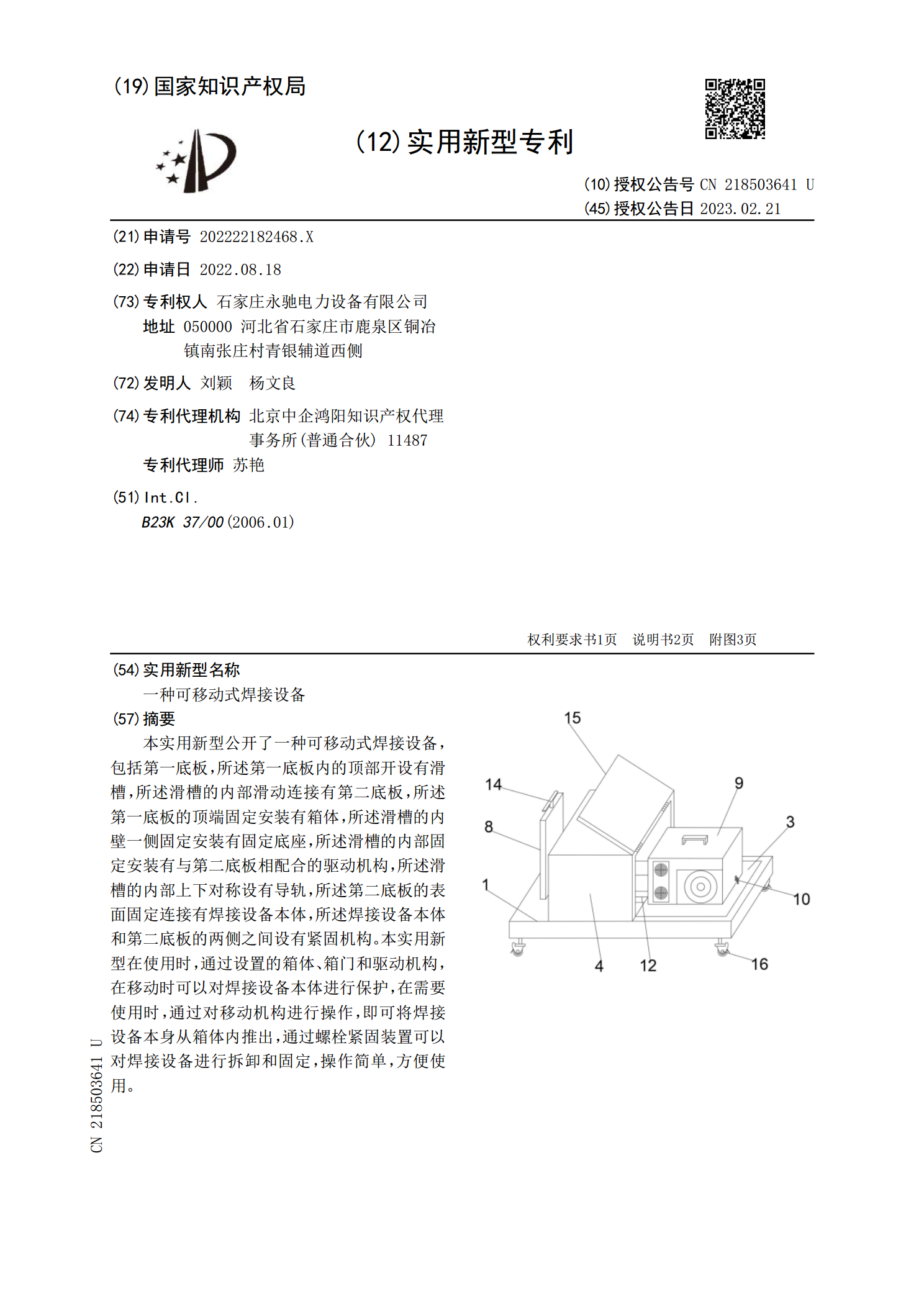
本实用新型公开了一种可移动式焊接设备,包括第一底板,所述第一底板内的顶部开设有滑槽,所述滑槽的内部滑动连接有第二底板,所述第一底板的顶端固定安装有箱体,所述滑槽的内壁一侧固定安装有固定底座,所述滑槽的内部固定安装有与第二底板相配合的驱动机构,所述滑槽的内部上下对称设有导轨,所述第二底板的表面固定连接有焊接设备本体,所述焊接设备本体和第二底板的两侧之间设有紧固机构。本实用新型在使用时,通过设置的箱体、箱门和驱动机构,在移动时可以对焊接设备本体进行保护,在需要使用时,通过对移动机构进行操作,即可将焊接设备本身

一种可移动式气动机械手.pdf
本发明涉及一种可移动式气动机械手,包括机械爪联动部件和机械爪,机械爪联动部件设置有轮子支架、轮子、承载底盘、转动轴承、气缸固定架、旋转气缸、伸缩气缸、支撑架、限位开关、机械爪固定架、伸缩臂;机械爪上设置有伸缩气缸、活塞、动力轴、机械爪活动臂连接轴、弹性垫片、夹爪、机械爪活动臂。利用PLC控制器编写程序对不同的气缸进行控制,进行相应的动作来取物放物,使用效果明显,具有很好的市场应用前景。