
一种基于神经网络的胎压式实时车载称重方法、系统.pdf

是你****枝呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于神经网络的胎压式实时车载称重方法、系统.pdf
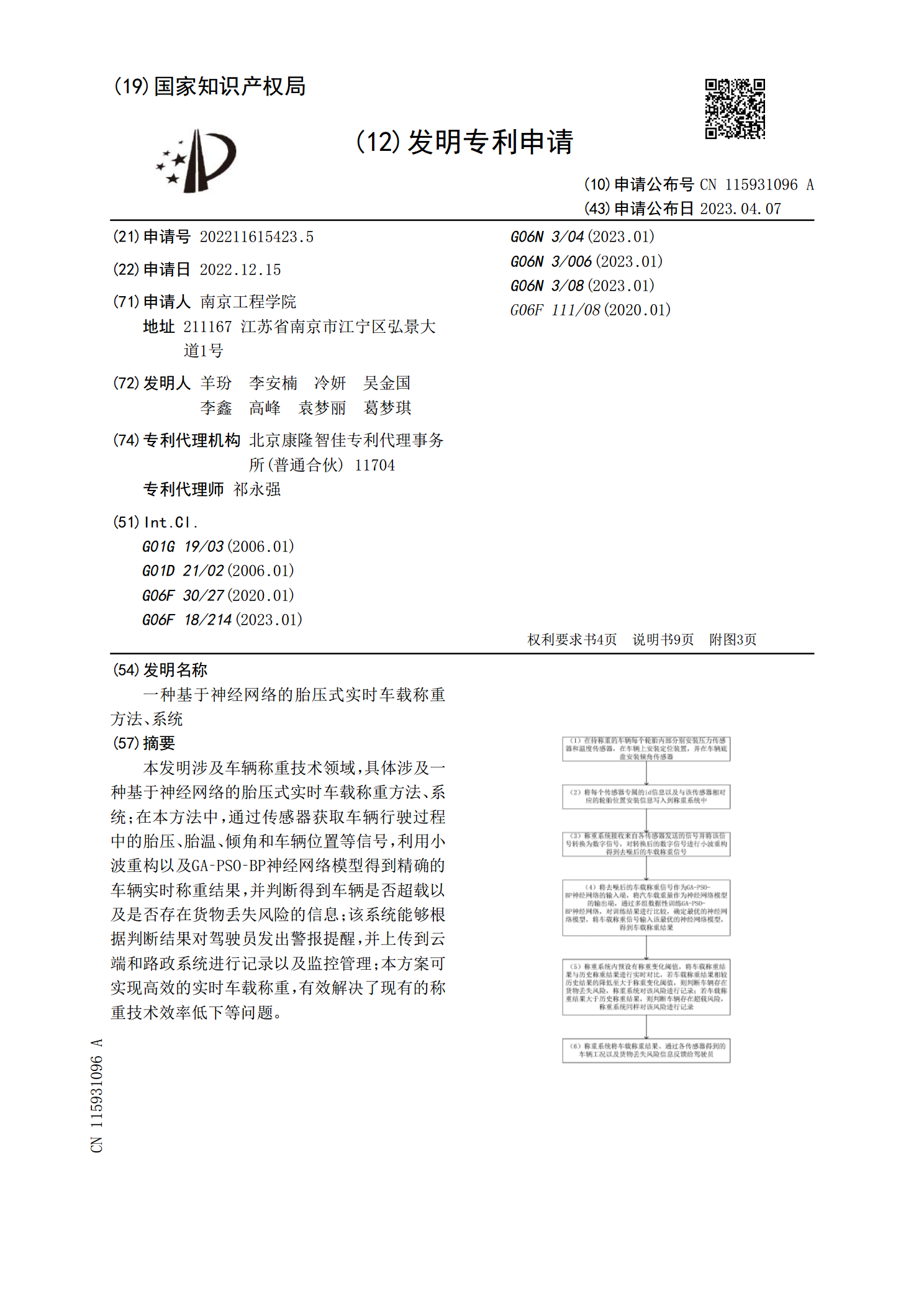
本发明涉及车辆称重技术领域,具体涉及一种基于神经网络的胎压式实时车载称重方法、系统;在本方法中,通过传感器获取车辆行驶过程中的胎压、胎温、倾角和车辆位置等信号,利用小波重构以及GA‑PSO‑BP神经网络模型得到精确的车辆实时称重结果,并判断得到车辆是否超载以及是否存在货物丢失风险的信息;该系统能够根据判断结果对驾驶员发出警报提醒,并上传到云端和路政系统进行记录以及监控管理;本方案可实现高效的实时车载称重,有效解决了现有的称重技术效率低下等问题。
基于胎压检测的车载硬盘保护方法及其系统.pdf
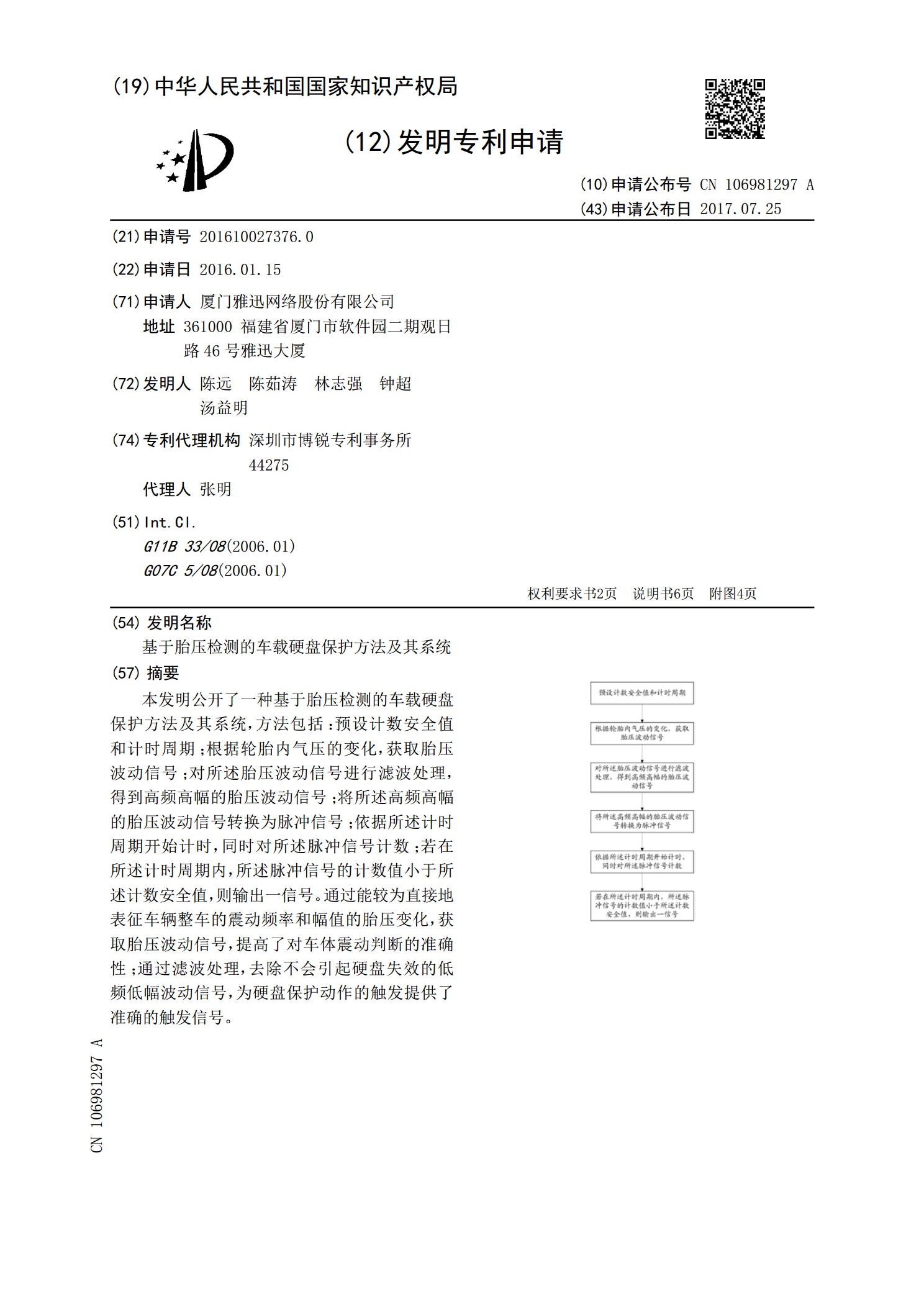
本发明公开了一种基于胎压检测的车载硬盘保护方法及其系统,方法包括:预设计数安全值和计时周期;根据轮胎内气压的变化,获取胎压波动信号;对所述胎压波动信号进行滤波处理,得到高频高幅的胎压波动信号;将所述高频高幅的胎压波动信号转换为脉冲信号;依据所述计时周期开始计时,同时对所述脉冲信号计数;若在所述计时周期内,所述脉冲信号的计数值小于所述计数安全值,则输出一信号。通过能较为直接地表征车辆整车的震动频率和幅值的胎压变化,获取胎压波动信号,提高了对车体震动判断的准确性;通过滤波处理,去除不会引起硬盘失效的低频低幅波
基于智能胎压计的汽车载重监测方法及系统.pdf
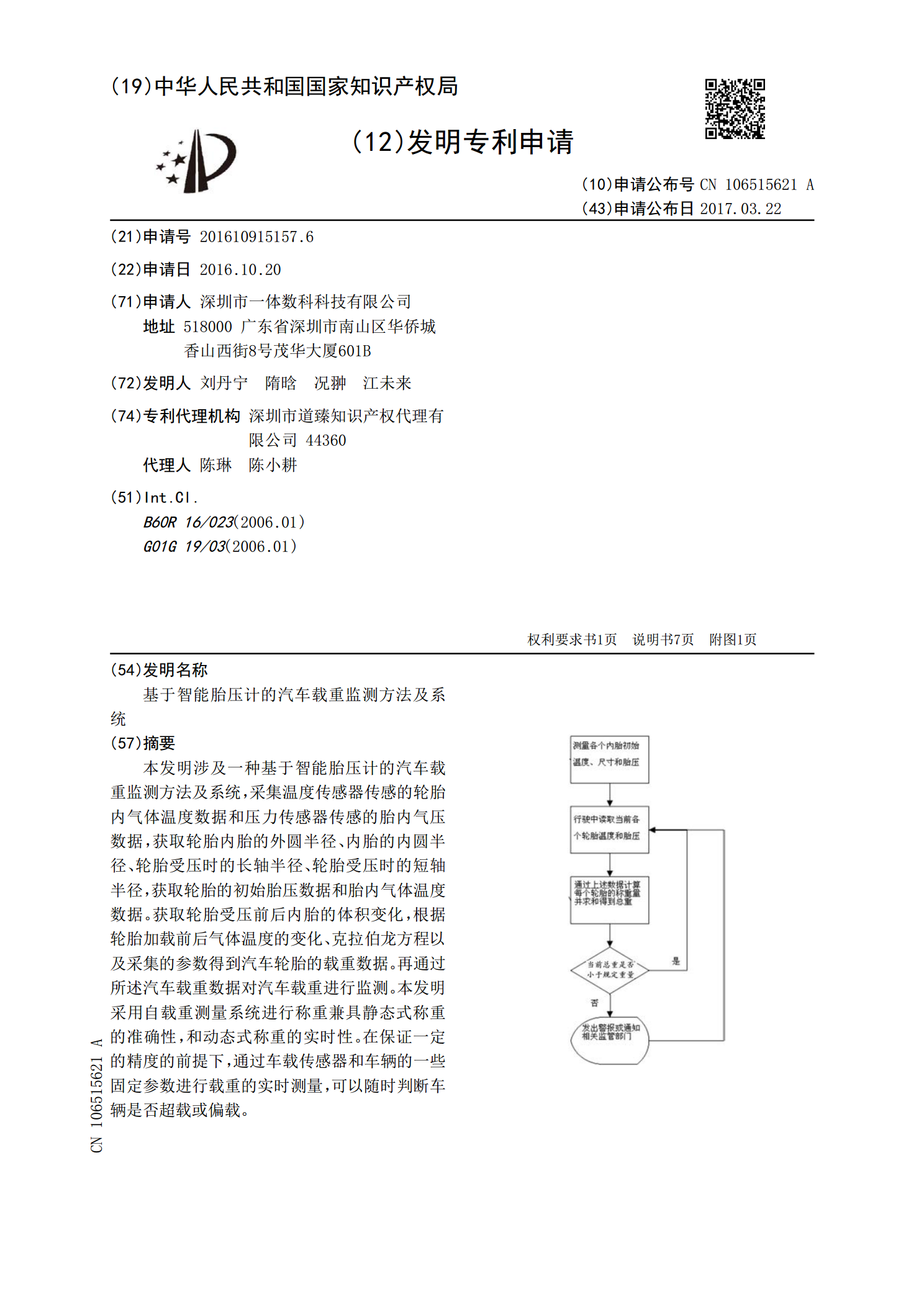
本发明涉及一种基于智能胎压计的汽车载重监测方法及系统,采集温度传感器传感的轮胎内气体温度数据和压力传感器传感的胎内气压数据,获取轮胎内胎的外圆半径、内胎的内圆半径、轮胎受压时的长轴半径、轮胎受压时的短轴半径,获取轮胎的初始胎压数据和胎内气体温度数据。获取轮胎受压前后内胎的体积变化,根据轮胎加载前后气体温度的变化、克拉伯龙方程以及采集的参数得到汽车轮胎的载重数据。再通过所述汽车载重数据对汽车载重进行监测。本发明采用自载重测量系统进行称重兼具静态式称重的准确性,和动态式称重的实时性。在保证一定的精度的前提下,

基于胎压检测的渣土车载重监控系统.pdf
本发明属智能测控技术领域,涉及一种基于胎压检测的渣土车载重监控系统;该系统由胎压检测模块、管理监控模块和远程监控服务器三大部分组成,所述胎压检测模块通过胎压检测的方式对渣土车进行测重,每个轮胎的胎压和温度信息都通过无线数传的方式发送至所述管理监控模块,所述管理监控模块经过计算得到载重信息,通过GPRS模块将渣土车的载重、位置和速度信息上传至远程监控服务器。本发明可方便地对渣土车进行实时测重、测速和跟踪,有效监控和治理渣土车“超载”、“超速”和“随意倾倒”三大顽症,并为此类违规行为提供了处罚和责任认定的依据

飞机胎压实时监控系统及监控方法.pdf
本发明公开了一种飞机胎压实时监控系统及监控方法,电源给起落架内控制模块供电;起落架内控制模块通过第一旋转变压器给机轮内监测模块供电,通过第二旋转变压器和机轮内监测模块进行交互通信,通过CAN总线与驾驶舱仪表进行交互通信;压力传感器实时监测轮胎压力,并将数据传给机轮内监测模块;机轮内监测模块控制放气机构调节胎压;驾驶舱仪表显示轮胎压力值和异常信息,并设定压力调控指令。本发明解决了电池供电和射频通信存在的较多问题,结构简单,扩展性好,可靠性高;可使得飞机在不同跑道和载重条件下降低爆胎几率,增大刹车效率,减小起