
一种四工位机械手.pdf

听容****55


1/9

2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种四工位机械手.pdf
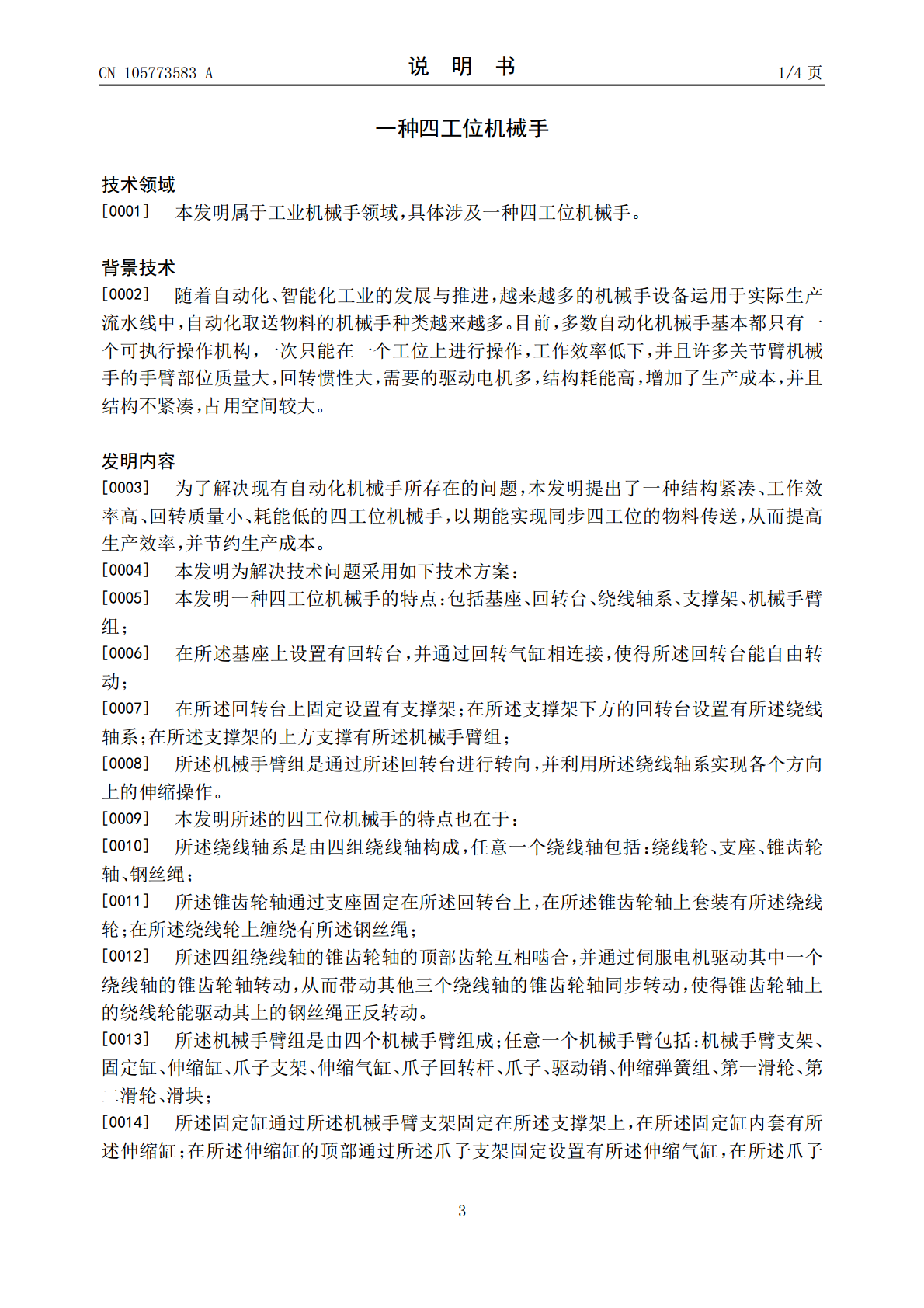
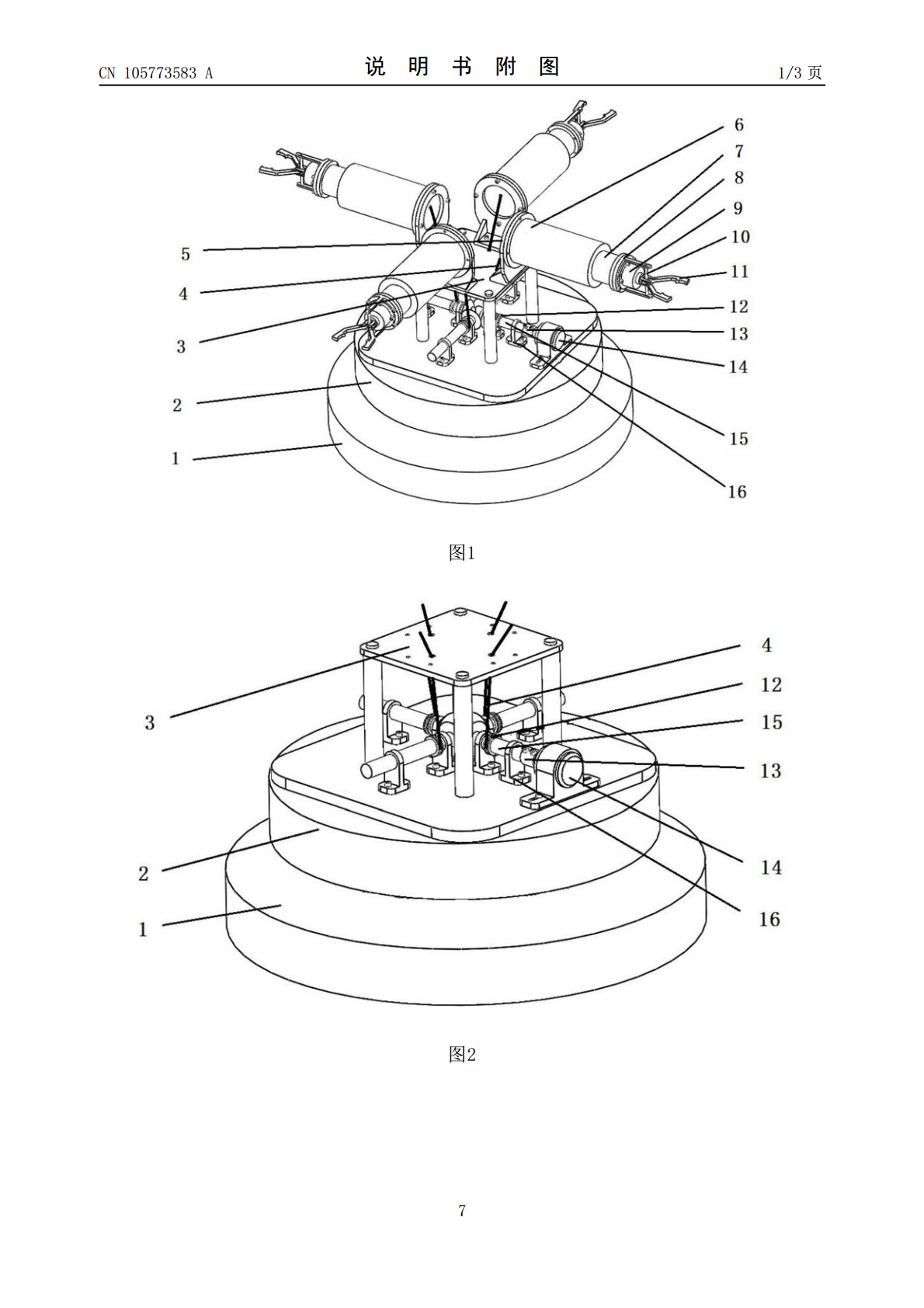
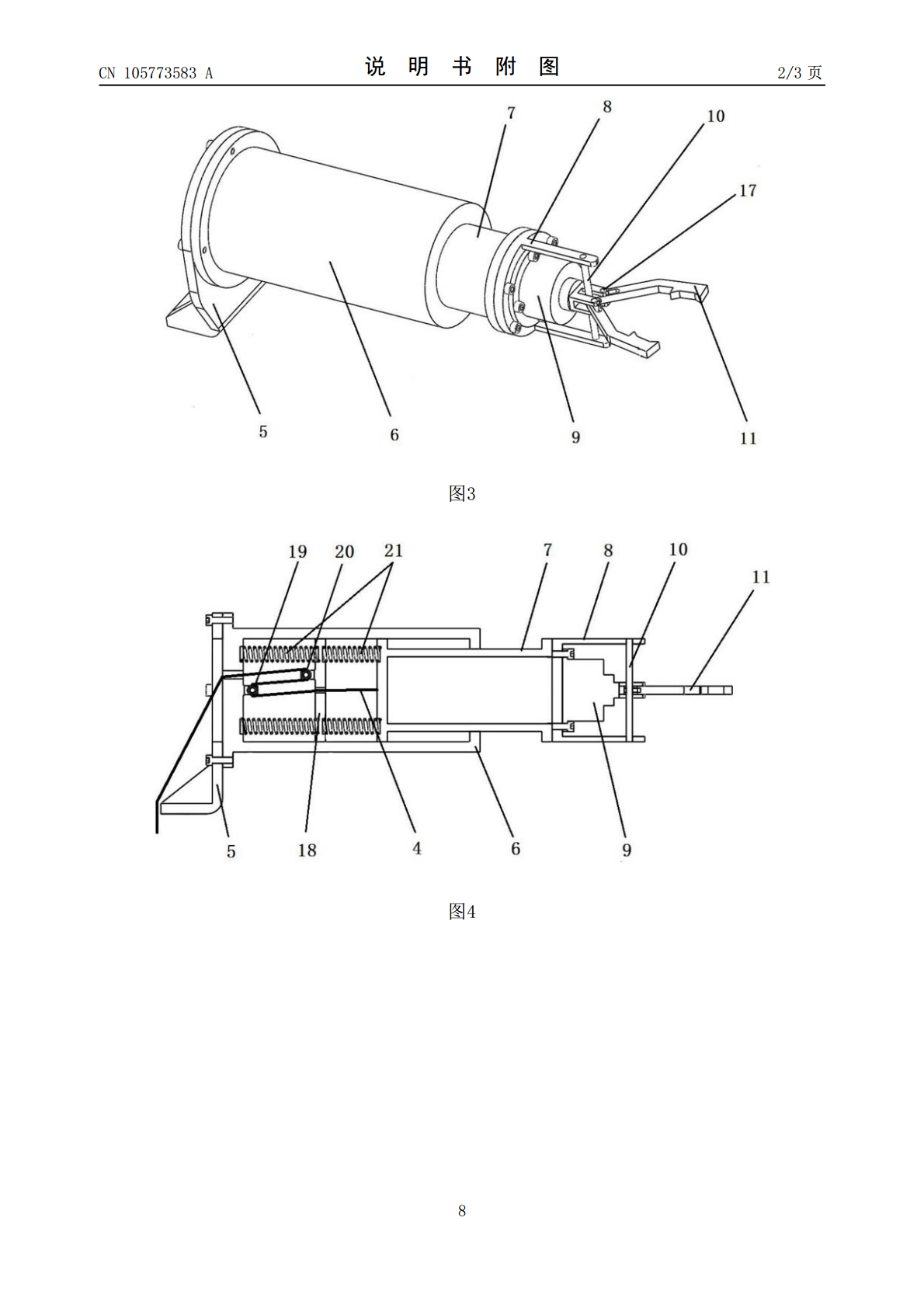
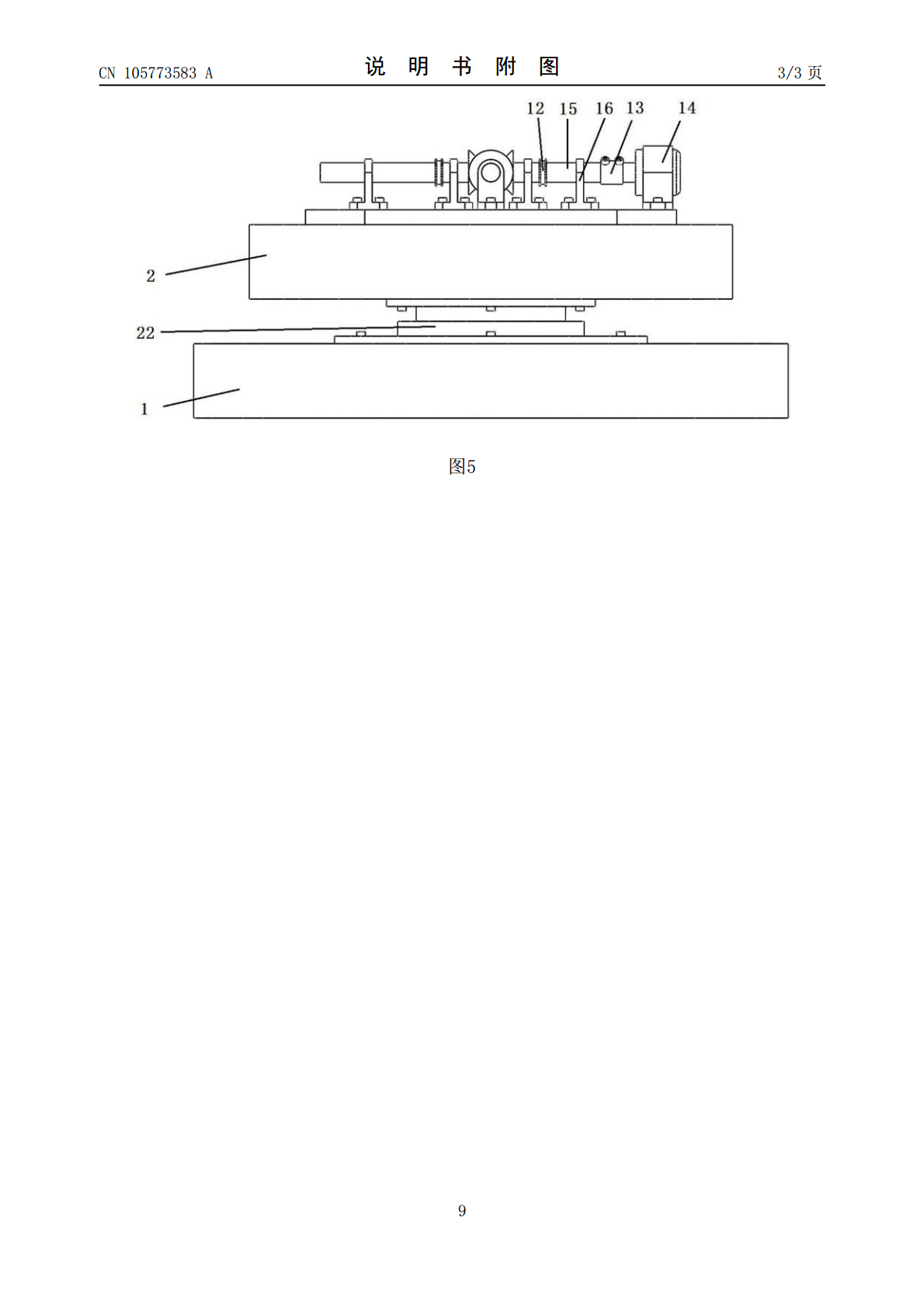
本发明公开了一种四工位机械手,其特征在于:包括基座、回转台、绕线轴系、支撑架、机械手臂组;在所述基座上设置有回转台,并通过回转气缸相连接,使得所述回转台能自由转动;在所述回转台上固定设置有支撑架;在所述支撑架下方的回转台设置有所述绕线轴系;在所述支撑架的上方支撑有所述机械手臂组;所述机械手臂组是通过所述回转台进行转向,并利用所述绕线轴系实现各个方向上的伸缩操作。本发明能实现同步四工位的物料传送,从而提高生产效率,并节约生产成本。
一种双工位机械手.pdf
本发明公开了一种双工位机械手,包括设置在操作平台上的驱动结构,所述驱动结构末端设有机械手掌,所述操作平台上设有置物孔,置物孔下方设有传送带,所述传送带贯穿操作平台并位于驱动结构下方。通过设备定制机械手控制系统,定制取模机械手掌,使取件模腔结构和模具模腔形状一致,在开模后,机械手进入模区,由机械手真空泵运行产生负压,通过机械手掌取件模腔产生吸气,在塑膜产品成型顶出之后,将其吸入取件模腔中,机械手退出模区,并且机械手自带水冷循环系统,将产品吸住的同时,使其快速冷却,达到膜外冷却功能,待产品冷却之后,机械手掌反

一种四工位三轴桁架机械手装置.pdf
本发明公开了一种四工位三轴桁架机械手装置,包括支撑座,支撑座上具有穿孔,穿孔内设有导向杆,导向杆的下端通过轴承安装有转盘,转盘的底部具有若干夹爪;支撑座上铰接有传动箱,传动箱上安装有C轴驱动电机、Z轴驱动电机、Z轴导轨组件和Z轴连板,Z轴连板通过Z轴导轨组件设置在传动箱上,传动箱内具有第二齿轮和Z轴齿轮,第二齿轮和所述C轴驱动电机的输出轴固定连接,Z轴齿轮和所述Z轴驱动电机的输出轴固定连接;所述Z轴连板上设有Z轴齿条,所述Z轴齿轮和所述Z轴齿条啮合,所述Z轴连板的下端和所述转盘固定连接;所述支撑座上固定安

一种多工位冲床机械手.pdf
本发明公开一种多工位冲床机械手,机架顶部设置有多个工位,工位下方的机架上设置有双片检测器、负压吸盘、送料机构,机架中部固定安装有横移驱动气缸、伸缩驱动气缸,横移驱动气缸一侧通过六角圆柱螺栓和弹簧垫片设置有导管,导管连接有液压缓冲器,机架底部安装有滚轮,机架上固定设置有分水滤气器、油管、调压器、储气罐、油雾器、压力继电器;分水滤气器、调压器和油雾器依次连接,分水滤气器一侧固定连接有油管,压力继电器上部与液压缓冲器四连接,连接板上侧固定设置有液压缓冲器三、升降驱动气缸,机架中部的底板上固定有大平板,大平板上固

一种双工位七轴机械手.pdf
本发明属于自动化设备技术领域,尤其是涉及一种双工位七轴机械手。所述的机架的上端设置有推移平台,推移平台的左侧通过一对升降支撑连杆连接有旋转组件,旋转组件的左侧通过旋转支架连接有两组手指气缸,手指气缸的外侧连接有机械手指;所述的旋转组件的上部后端通过支架固定有Z轴平移驱动气缸,旋转组件的右侧中间设置有旋转齿轮,旋转齿轮的上端啮合有驱动齿条,驱动齿条的后端连接有旋转驱动气缸;所述的推移平台的后端连接有Y轴平移驱动气缸,推移平台的右端连接有X轴平移驱动气缸。它由两套对称设置的机械手及多方向的运动驱动球杆组成,结