
用于单孔手术器械的刚度可控关节蛇形机构.pdf

书生****aa

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

用于单孔手术器械的刚度可控关节蛇形机构.pdf
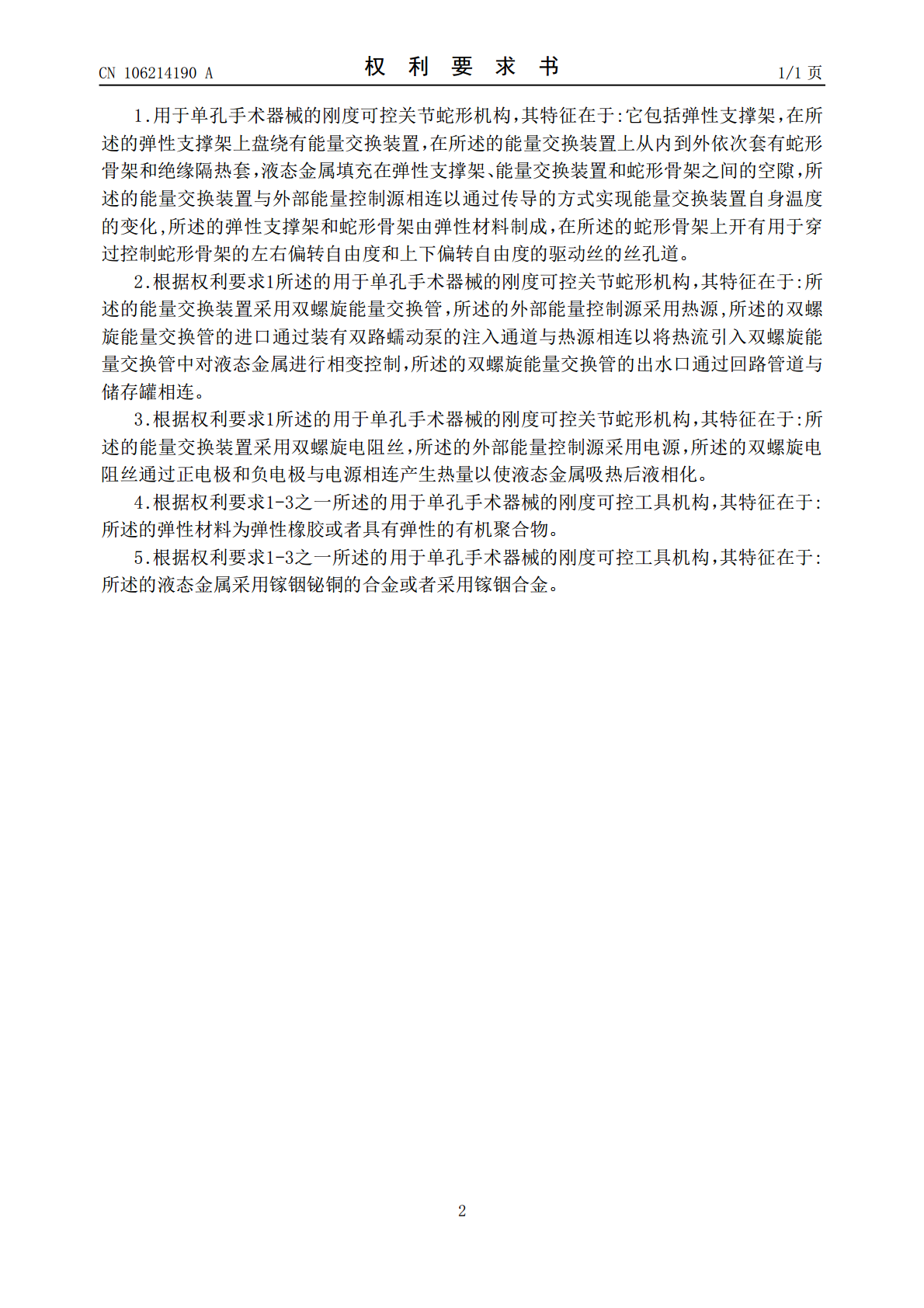
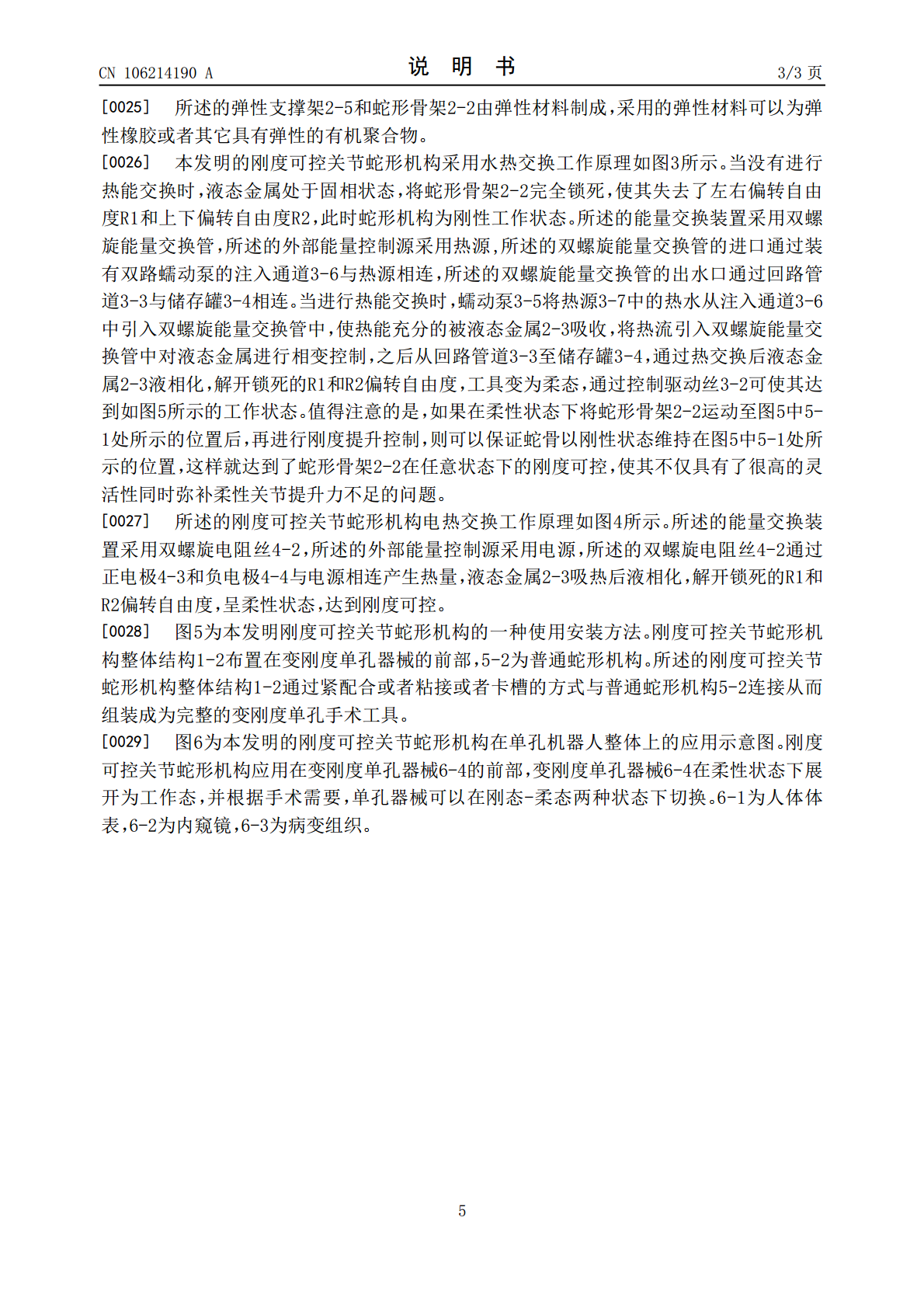
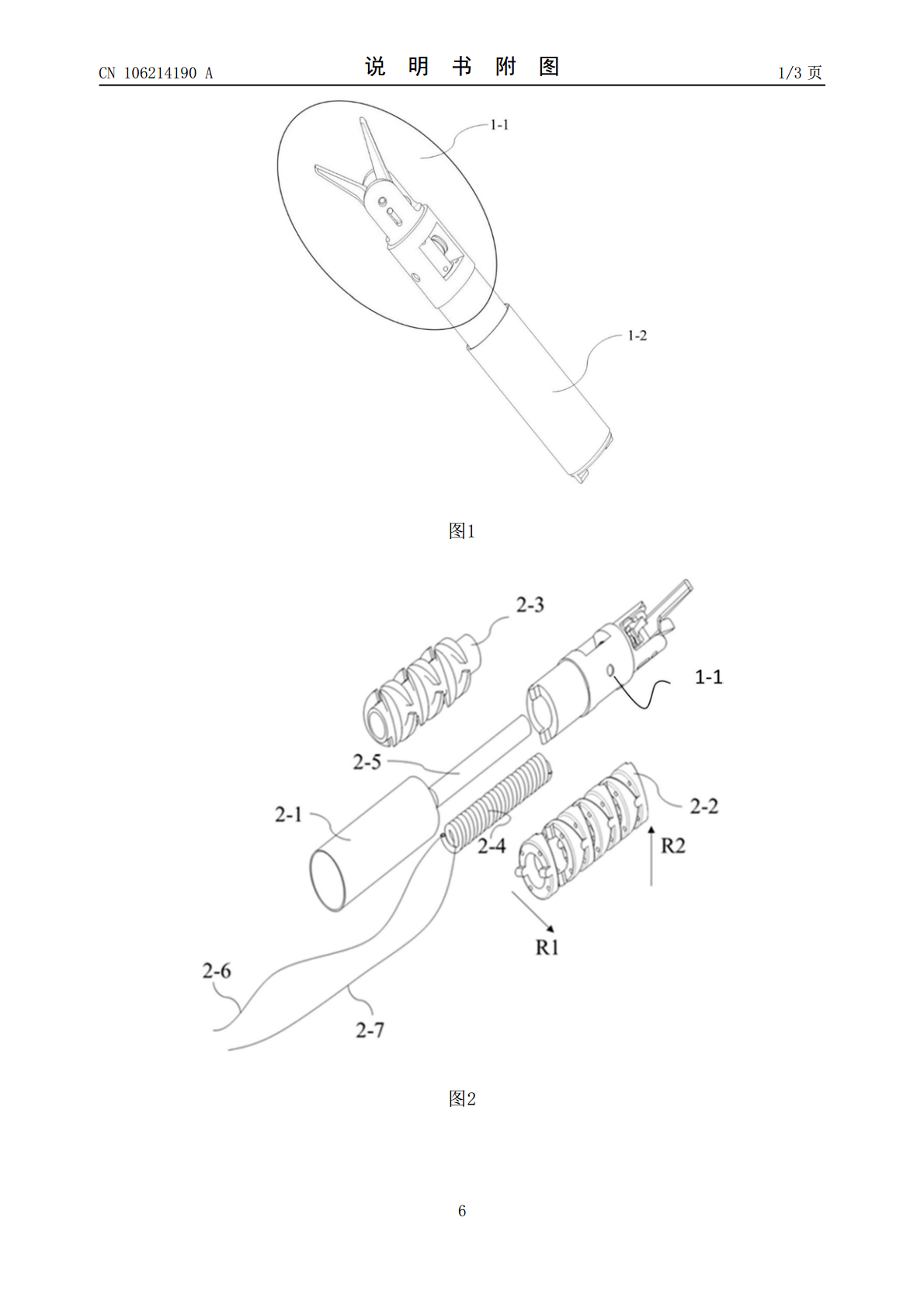
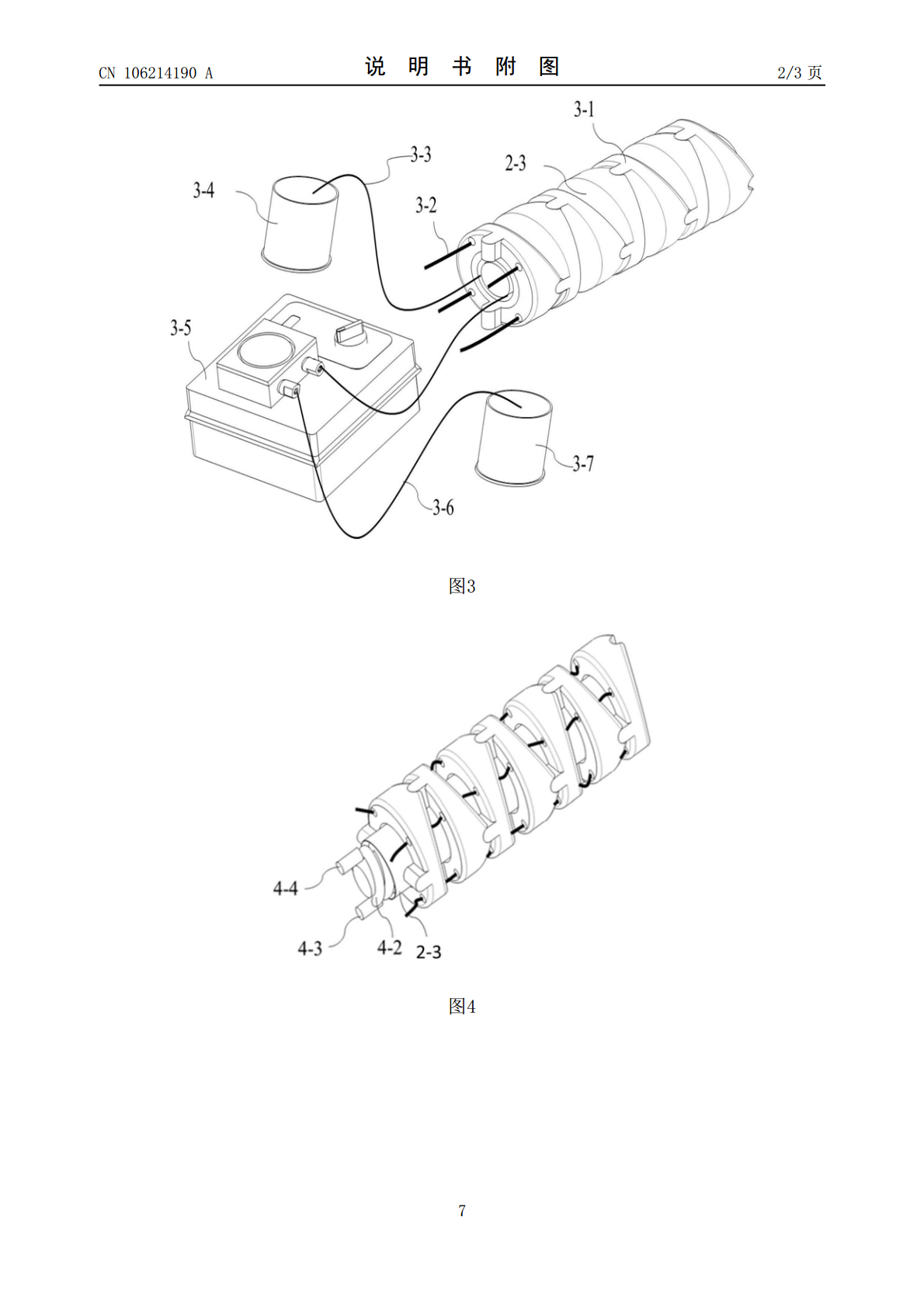
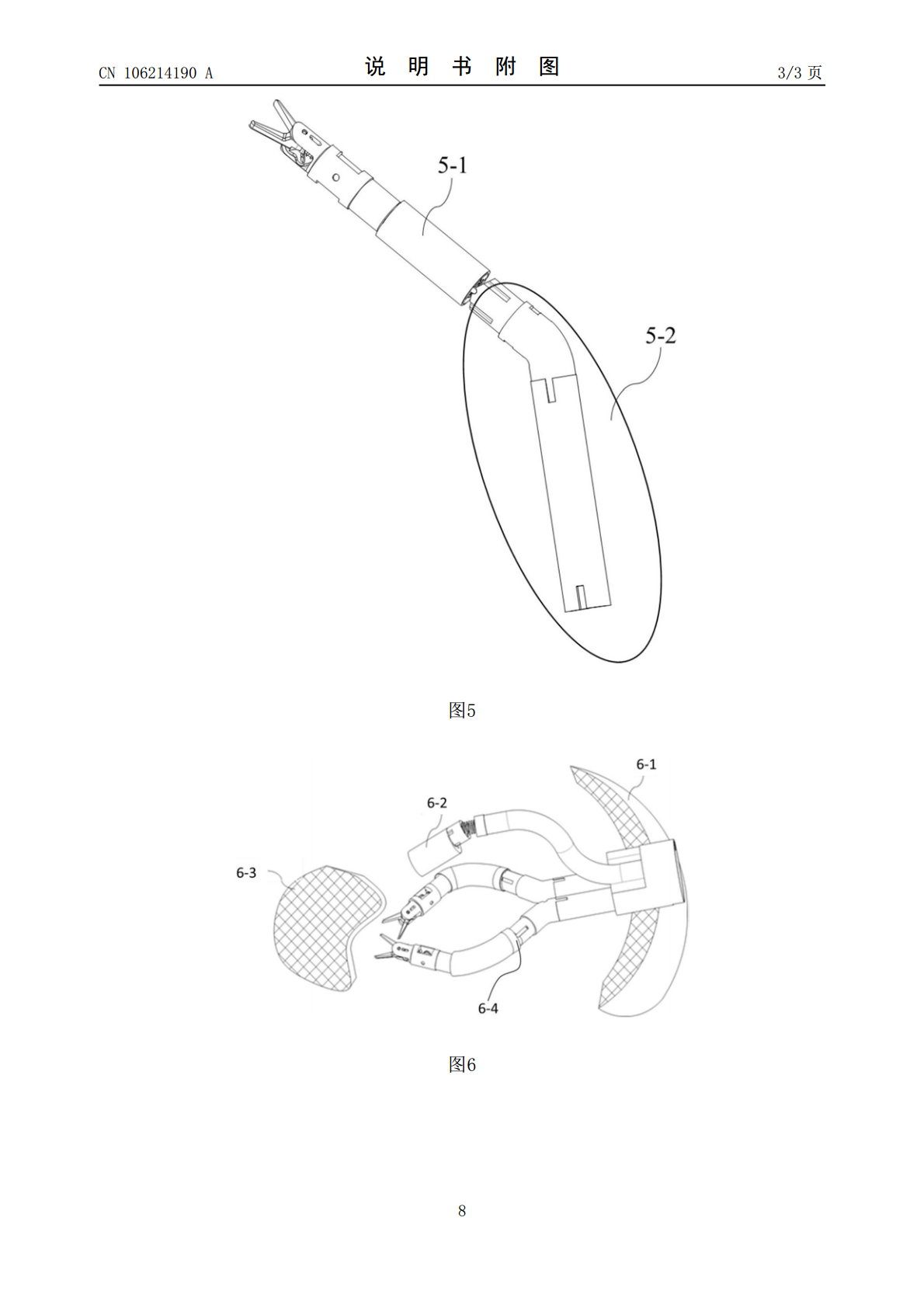
本发明公开了用于单孔手术器械的刚度可控关节蛇形机构,它包括弹性支撑架,在弹性支撑架上盘绕有能量交换装置,在能量交换装置上从内到外依次套有蛇形骨架和绝缘隔热套,液态金属填充在弹性支撑架、能量交换装置和蛇形骨架之间的空隙,能量交换装置与外部能量控制源相连以通过传导的方式实现能量交换装置自身温度的变化,弹性支撑架和蛇形骨架由弹性材料制成,在蛇形骨架上开有用于穿过控制蛇形骨架的左右偏转自由度和上下偏转自由度的驱动丝的丝孔道。本机构可更有效的避免工具在手术操作时的碰撞问题。

变刚度并联关节蛇形机器人机构.pdf
本发明涉及一种变刚度并联关节蛇形机器人机构,属于机器人领域。机器人由若干运动单元串联构成,每个运动单元含有两自由度空间并联关节,关节由一条固定U支链、两条SPDU主动支链构成,主动支链含有变刚度直线驱动器;旋转轴与固定U支链平行的主动轮构成运动单元轮廓,通过能抵消反向力矩的隔振装置与固定U支链连接。优点在于:主动支链刚度、阻尼受控可变,使蛇形机器人既可以通过增加关节柔性提高地形适应能力,又可以通过增加关节刚度提高姿态精确性与稳定性,从而增加本发明的适用性;机器人运动过程中产生的振动被隔振装置以及主动支链吸
一种蛇形机器人的模块化变刚度关节机构.pdf
本发明公开了一种蛇形机器人的模块化变刚度关节机构,属于机器人研究与工程领域,当全向轮围绕模块中轴线转动时,蛇形机器人能够实现轮式运动;当关节中的并联直线驱动器伸缩时,全向轮中的各个小被动轮与地面接触产生各向异性摩擦力实现蛇形运动,此外,轮的两侧有偏盖,可以对轮体起到一定的保护作用。同时,磁流变阻尼环节的阻尼力控制是和支链运动控制分开的,可以根据需求,通过控制活塞头的线圈的电流大小来改变磁流套筒内的磁场强度,改变磁流变液的状态,进而达到控制阻尼力,实现变刚度的功能。该环节既不影响蛇形机器人实现各种运动步态,

手术机器人用蛇形关节、手术器械及内窥镜.pdf
本发明提供了一种手术机器人用蛇形关节,包括至少一个关节接头对以及柔性结构,每个关节接头对的第一关节接头包括第一球面,第一球面上设置有第一啮合机构,每个关节接头对的第二关节接头包括第二球面,第二球面上设置有第二啮合机构,第一啮合机构和第二啮合机构相啮合,所述柔性结构控制所述关节接头对的摆动方向和摆动角度,实现所述蛇形关节的摆动。采用球面作为关节接头对摆动时的支撑结构,提高了蛇形关节的承载能力;通过啮合机构的啮合运动实现关节接头对的摆动,提高啮合机构的啮合精度,可以实现蛇形关节的高弯曲精度。在本发明提供的手术
空间可控时变刚度柔性关节装置.pdf
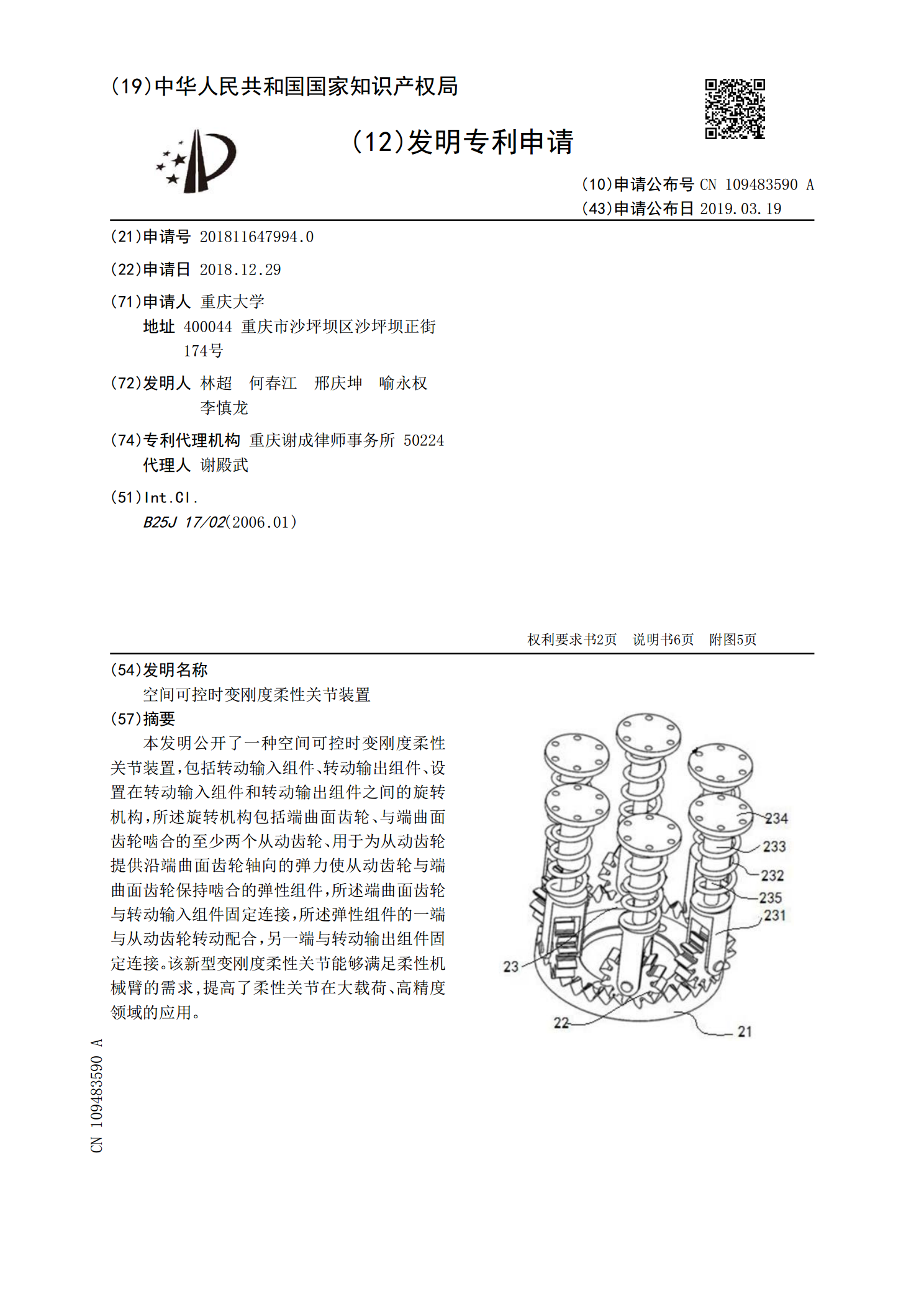
本发明公开了一种空间可控时变刚度柔性关节装置,包括转动输入组件、转动输出组件、设置在转动输入组件和转动输出组件之间的旋转机构,所述旋转机构包括端曲面齿轮、与端曲面齿轮啮合的至少两个从动齿轮、用于为从动齿轮提供沿端曲面齿轮轴向的弹力使从动齿轮与端曲面齿轮保持啮合的弹性组件,所述端曲面齿轮与转动输入组件固定连接,所述弹性组件的一端与从动齿轮转动配合,另一端与转动输出组件固定连接。该新型变刚度柔性关节能够满足柔性机械臂的需求,提高了柔性关节在大载荷、高精度领域的应用。