
智能轮式助行平台及其控制策略方法.pdf

宁馨****找我


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

智能轮式助行平台及其控制策略方法.pdf
本发明公开了一种智能轮式助行平台及其控制策略方法,包括支撑架主体、驱动装置、集成模块、以及电源,驱动装置包括电机、传动装置、以及检测电机转速的编码器,集成模块包括雷达、主控制器、以及检测助行平台倾斜程度的陀螺仪,扶手上设置有行走控制面板;其控制策略方法包括:1)动态补偿助行控制策略,2)安全防摔策略。本发明智能轮式助行平台实现了自主助行,易于操作、省力简单,使用者能够根据自身情况对助行平台的移动速度进行自主掌控,刹车方便,使用安全性好;其控制策略方法提供了不同移动情况下的控制方案,能保证使用者在不同移动情
智能轮式助行器.pdf
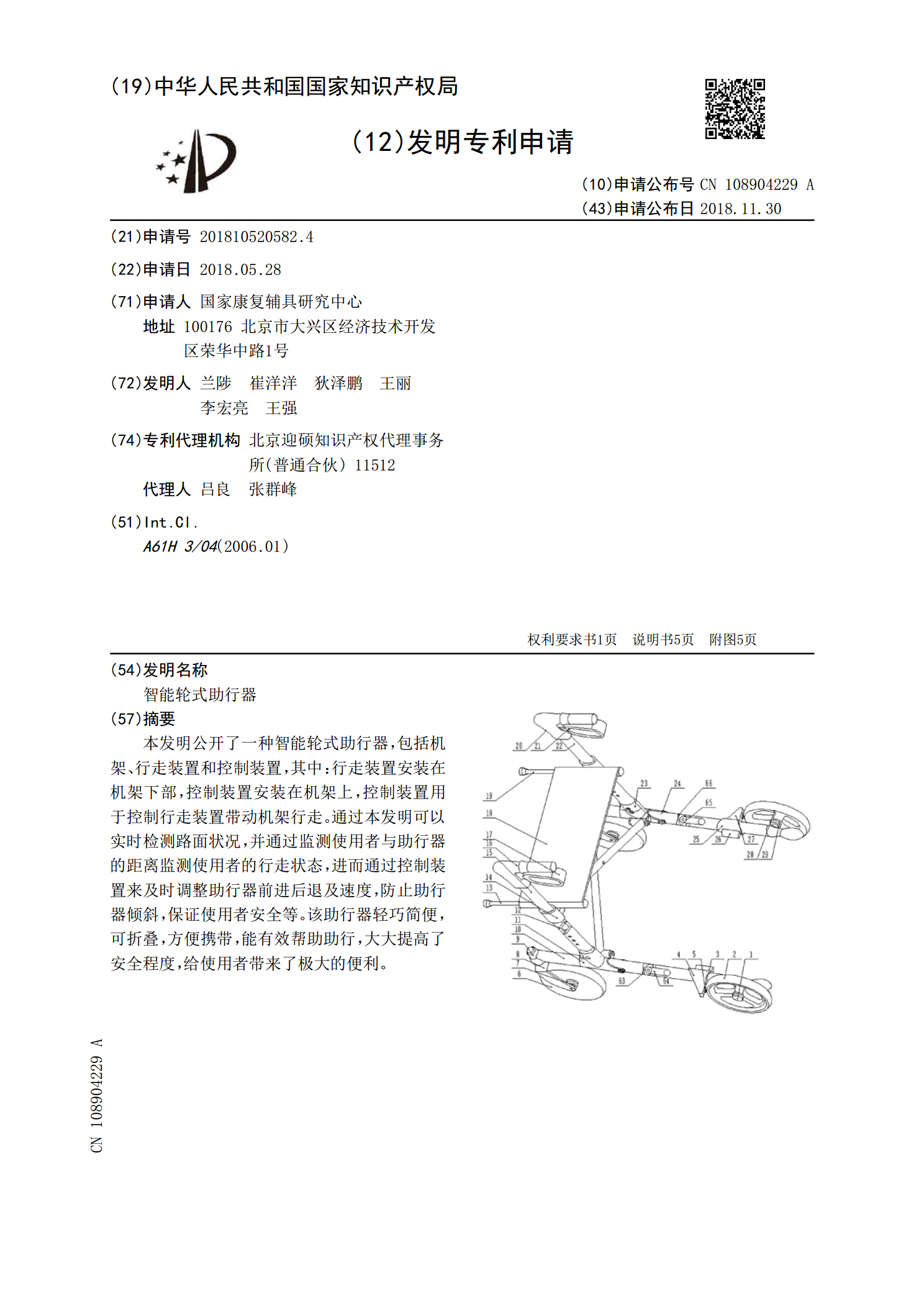
本发明公开了一种智能轮式助行器,包括机架、行走装置和控制装置,其中:行走装置安装在机架下部,控制装置安装在机架上,控制装置用于控制行走装置带动机架行走。通过本发明可以实时检测路面状况,并通过监测使用者与助行器的距离监测使用者的行走状态,进而通过控制装置来及时调整助行器前进后退及速度,防止助行器倾斜,保证使用者安全等。该助行器轻巧简便,可折叠,方便携带,能有效帮助助行,大大提高了安全程度,给使用者带来了极大的便利。
全向轮式平台及其行走控制方法.pdf
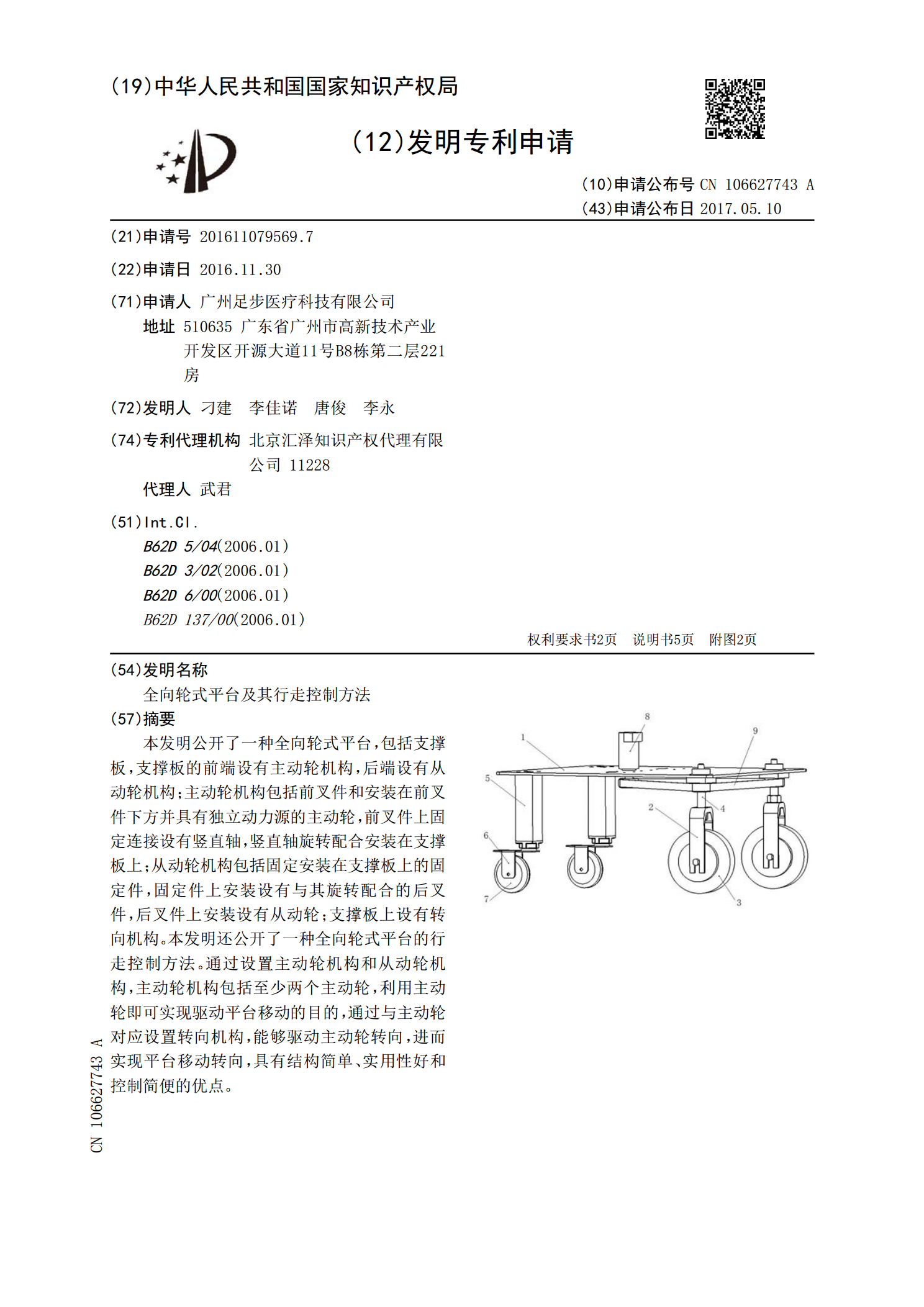
本发明公开了一种全向轮式平台,包括支撑板,支撑板的前端设有主动轮机构,后端设有从动轮机构;主动轮机构包括前叉件和安装在前叉件下方并具有独立动力源的主动轮,前叉件上固定连接设有竖直轴,竖直轴旋转配合安装在支撑板上;从动轮机构包括固定安装在支撑板上的固定件,固定件上安装设有与其旋转配合的后叉件,后叉件上安装设有从动轮;支撑板上设有转向机构。本发明还公开了一种全向轮式平台的行走控制方法。通过设置主动轮机构和从动轮机构,主动轮机构包括至少两个主动轮,利用主动轮即可实现驱动平台移动的目的,通过与主动轮对应设置转向机

基于致动策略和智能运动控制的智能助行器控制系统.pdf
本发明公开了基于致动策略和智能运动控制的智能助行器控制系统,包括高级控制器、用户状态感应模块和感应控制手柄,高级控制器分别与用户状态感应模块和感应控制手柄数据传输连接,高级控制器集成有速度控制模块和位置控制模块,速度控制模块通过动力轮驱动单元与动力轮运动连接,位置控制模块包括跌倒预防单元和扭矩调节单元,跌倒预防单元由支腿回收单元和支腿伸展单元组成。本发明在动静态模式下,用户状态感应模块感应到用户存在跌倒风险,高级控制器控制跌倒预防单元的支腿伸展单元,使得支腿伸展,扭矩调节单元介入控制动力轮,不受外力或力矩

智能助行装置以及用于控制其提供助行的方法.pdf
一种智能助行装置和用于控制其提供助行的方法。该智能助行装置包括装置主体和行走控制器,其中,装置主体包括分别设置在智能助行装置的上部和下部的上部支撑组件和下部支撑组件,上部支撑组件包括至少一个扶手板,下部支撑组件包括至少一个底部支撑架和与至少一个底部支撑架相连接的底盘移动装置,装置主体还包括布置在上部支撑组件和下部支撑组件之间的至少一个中间支撑架;行走控制器被设置在装置主体上,并且被配置为获取用户操纵智能助行装置所产生的力数据并且基于力数据分析用户的行走意图,然后根据智能助行装置的助行控制模式基于用户的行走