
多工位点胶系统及其方法.pdf

小沛****文章

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
多工位点胶系统及其方法.pdf
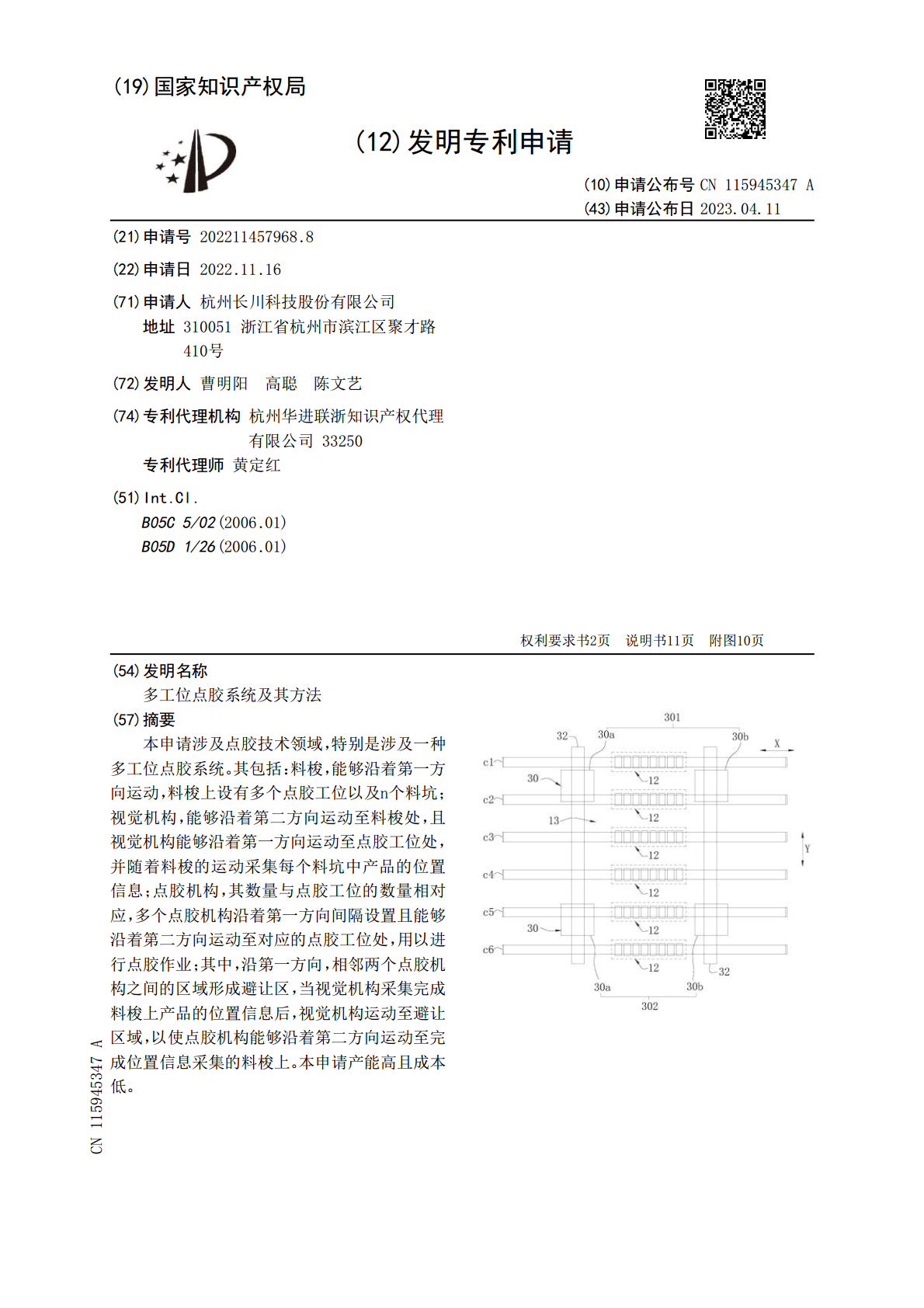
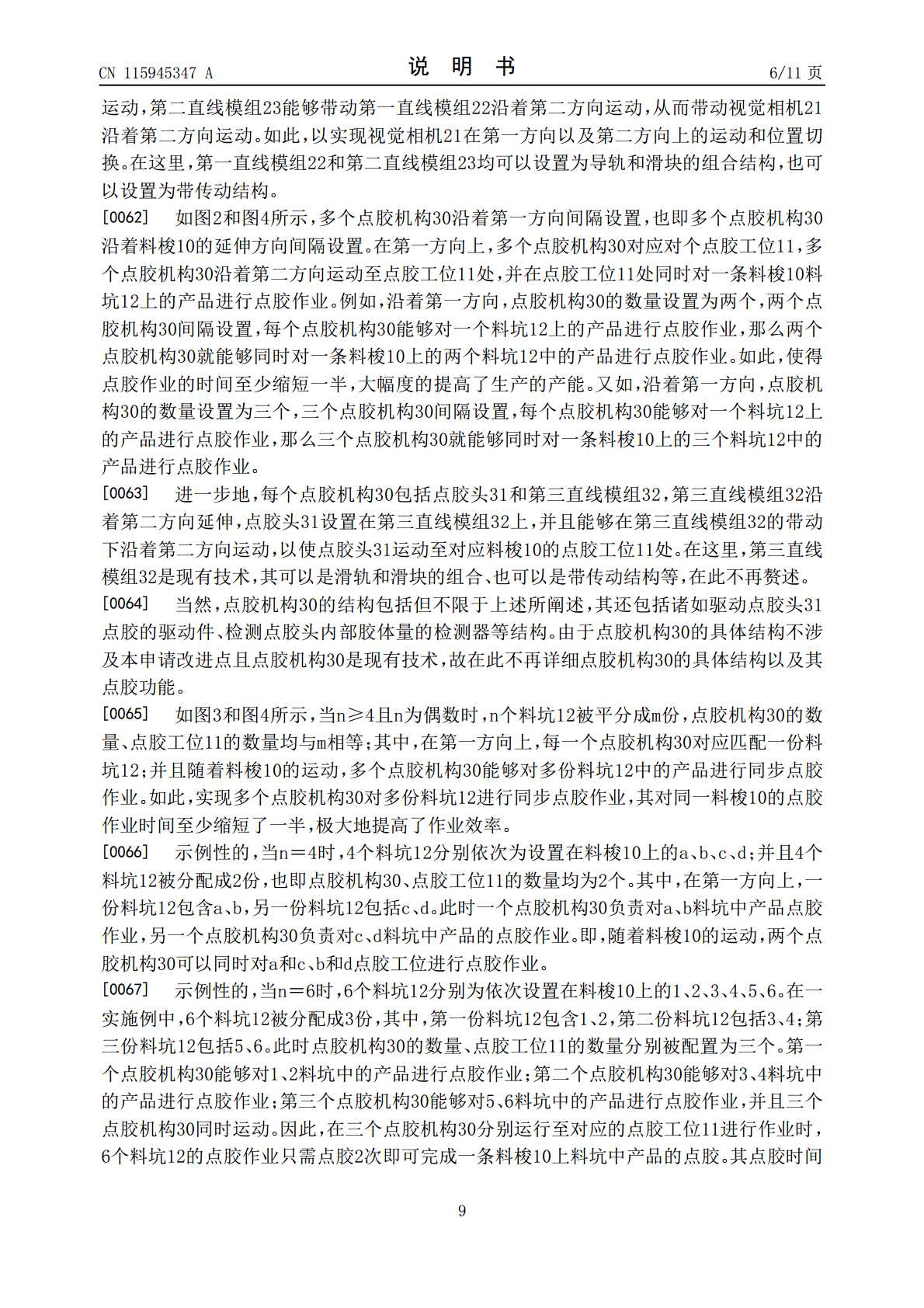
本申请涉及点胶技术领域,特别是涉及一种多工位点胶系统。其包括:料梭,能够沿着第一方向运动,料梭上设有多个点胶工位以及n个料坑;视觉机构,能够沿着第二方向运动至料梭处,且视觉机构能够沿着第一方向运动至点胶工位处,并随着料梭的运动采集每个料坑中产品的位置信息;点胶机构,其数量与点胶工位的数量相对应,多个点胶机构沿着第一方向间隔设置且能够沿着第二方向运动至对应的点胶工位处,用以进行点胶作业;其中,沿第一方向,相邻两个点胶机构之间的区域形成避让区,当视觉机构采集完成料梭上产品的位置信息后,视觉机构运动至避让区域,
多工位点胶机构位移转化方法及多工位点胶装置.pdf
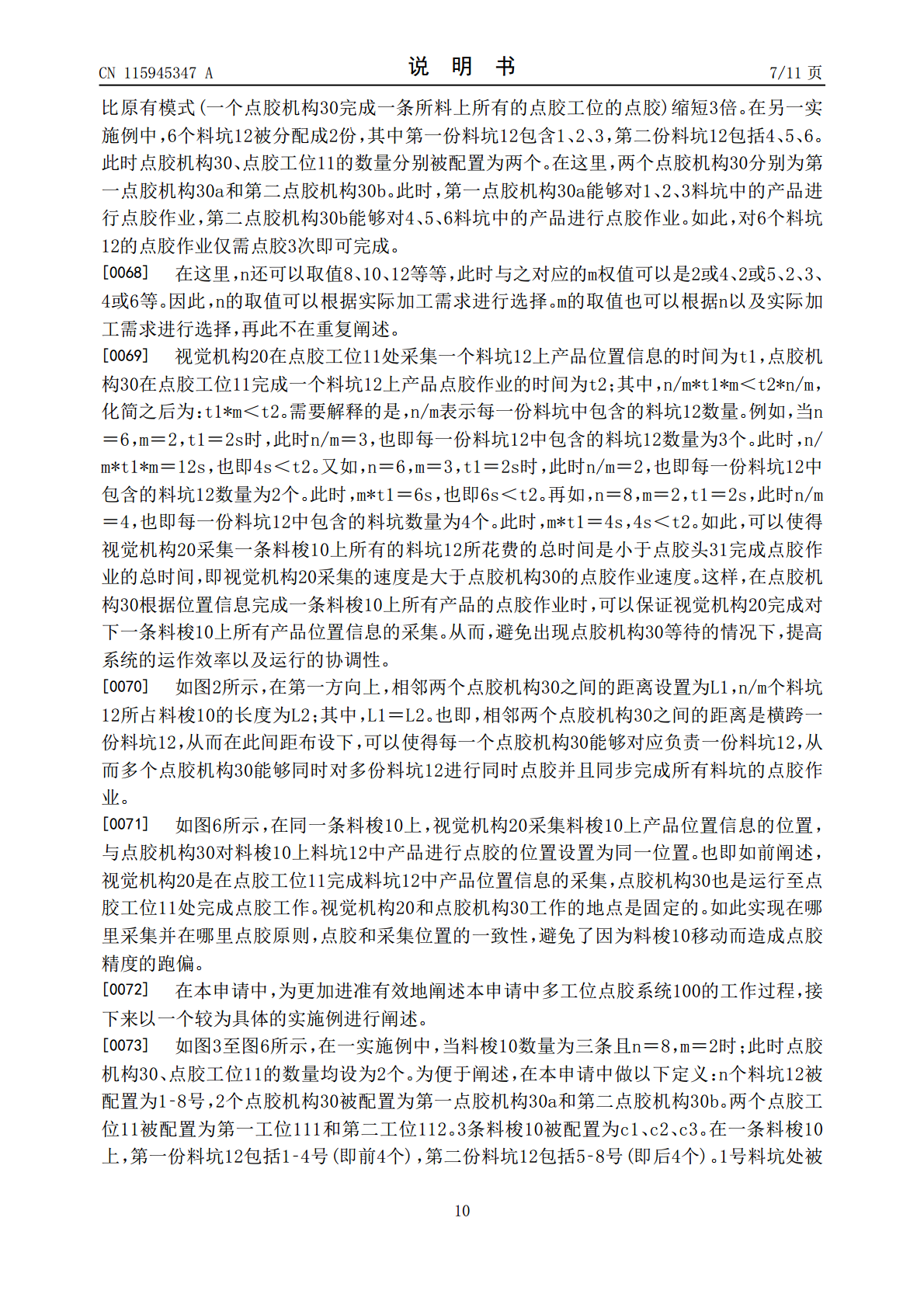
本申请涉及点胶技术领域,特别是涉及一种多工位点胶机构高度转化方法,其方法包括:获取所述仿真针头的虚拟补偿值X
一种多工位铝型材填胶系统及其工作方法.pdf
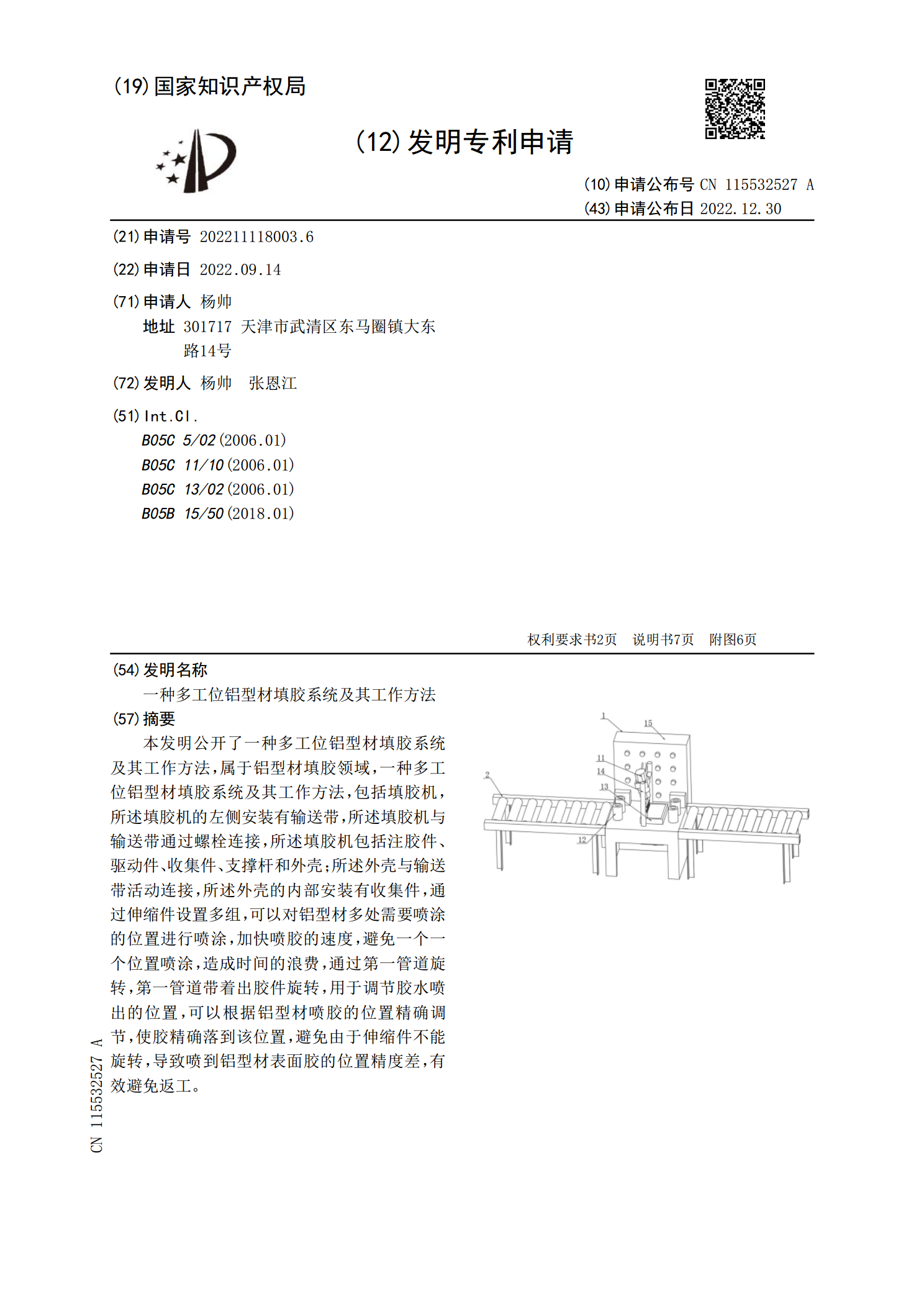
本发明公开了一种多工位铝型材填胶系统及其工作方法,属于铝型材填胶领域,一种多工位铝型材填胶系统及其工作方法,包括填胶机,所述填胶机的左侧安装有输送带,所述填胶机与输送带通过螺栓连接,所述填胶机包括注胶件、驱动件、收集件、支撑杆和外壳;所述外壳与输送带活动连接,所述外壳的内部安装有收集件,通过伸缩件设置多组,可以对铝型材多处需要喷涂的位置进行喷涂,加快喷胶的速度,避免一个一个位置喷涂,造成时间的浪费,通过第一管道旋转,第一管道带着出胶件旋转,用于调节胶水喷出的位置,可以根据铝型材喷胶的位置精确调节,使胶精确

点胶控制方法及其系统.pdf
本发明公开了一种点胶控制方法及其系统,适用于自动点胶装置,通过对工件及点胶机构的控制,实现了对工件进行自动化流水线的点胶作业,不仅能有效提高工作点胶的作业效率,且确保工件点胶成品的质量品质。并且通过在点胶作业完成后,控制点胶机构到达点胶工位进行刮胶作业以刮除点胶机构的出胶口处的残留胶,避免残留胶凝固影响下次点胶作业,确保作业环境洁净,同时通过在刮胶作业完成后,控制点胶机构到达封胶工位进行封胶作业以对点胶机构出胶口的开口表面的胶水进行密封,避免出胶口的开口表面的胶水凝固影响下次点胶作业的出胶效率和出胶质量,
一种多工位球胆刷胶系统.pdf
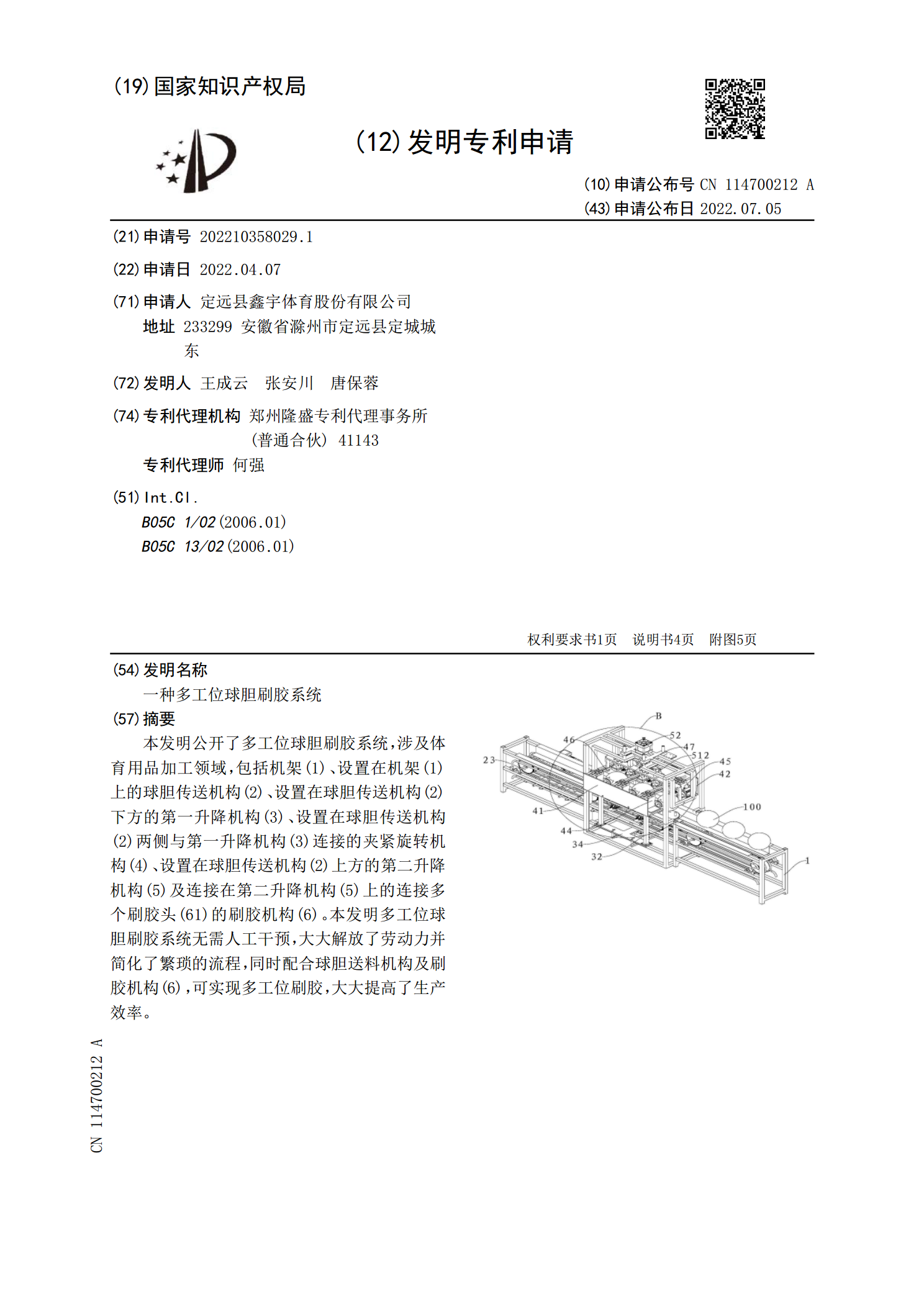
本发明公开了多工位球胆刷胶系统,涉及体育用品加工领域,包括机架(1)、设置在机架(1)上的球胆传送机构(2)、设置在球胆传送机构(2)下方的第一升降机构(3)、设置在球胆传送机构(2)两侧与第一升降机构(3)连接的夹紧旋转机构(4)、设置在球胆传送机构(2)上方的第二升降机构(5)及连接在第二升降机构(5)上的连接多个刷胶头(61)的刷胶机构(6)。本发明多工位球胆刷胶系统无需人工干预,大大解放了劳动力并简化了繁琐的流程,同时配合球胆送料机构及刷胶机构(6),可实现多工位刷胶,大大提高了生产效率。