
一种架空高压输电线路巡检机器人回收装置.pdf

努力****爱静

1/9
2/9

3/9
4/9
5/9
6/9
7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种架空高压输电线路巡检机器人回收装置.pdf
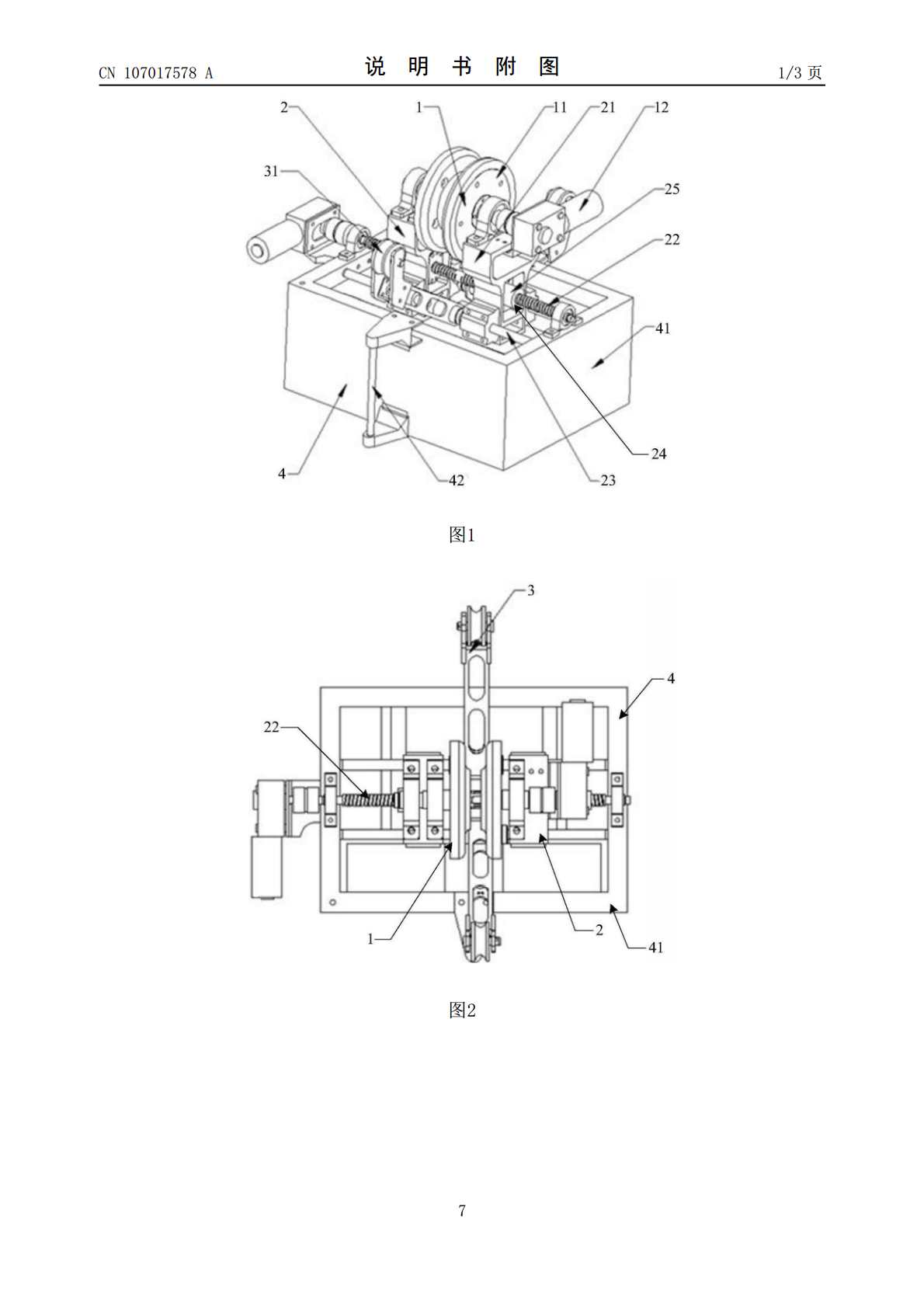
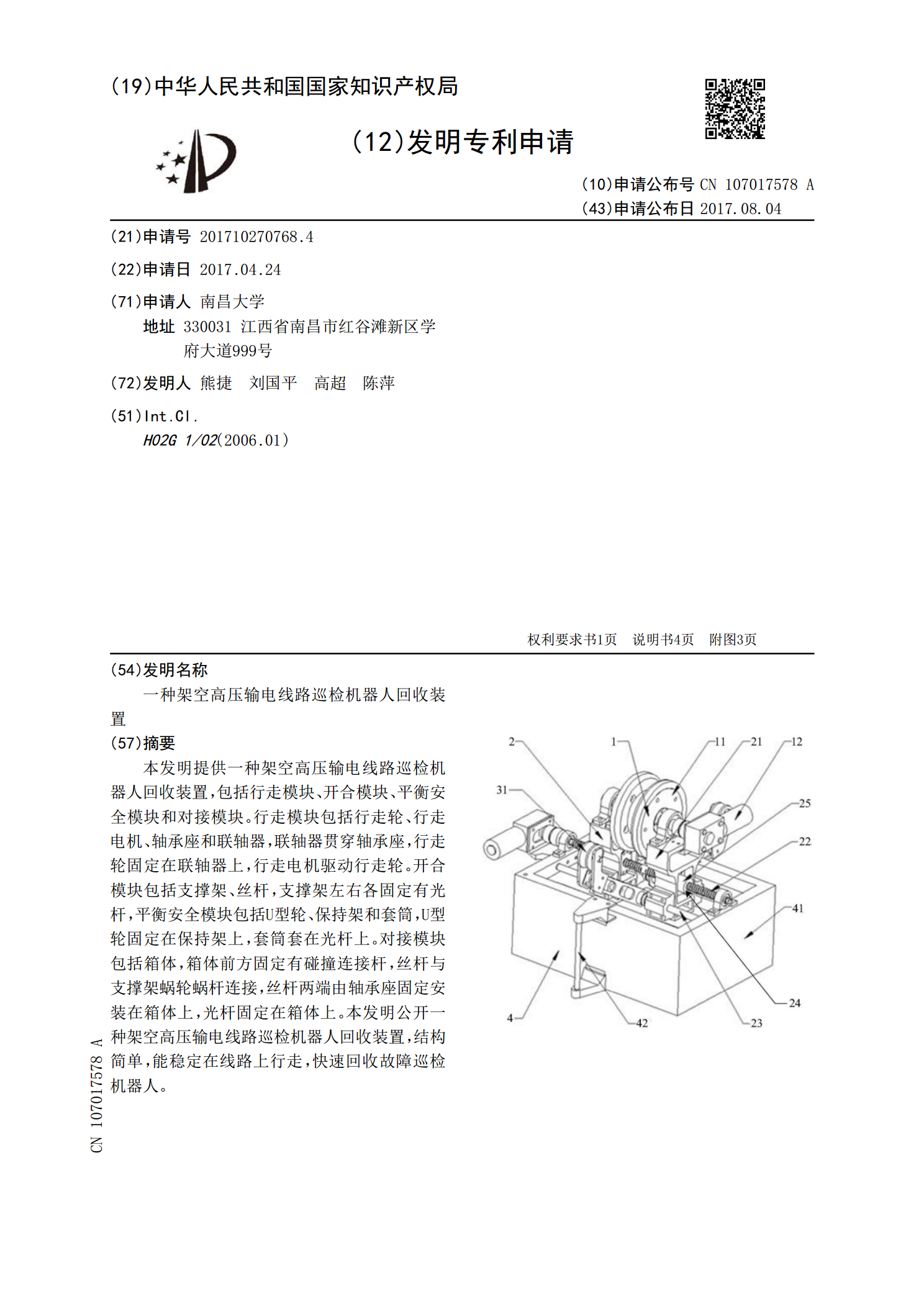
本发明提供一种架空高压输电线路巡检机器人回收装置,包括行走模块、开合模块、平衡安全模块和对接模块。行走模块包括行走轮、行走电机、轴承座和联轴器,联轴器贯穿轴承座,行走轮固定在联轴器上,行走电机驱动行走轮。开合模块包括支撑架、丝杆,支撑架左右各固定有光杆,平衡安全模块包括U型轮、保持架和套筒,U型轮固定在保持架上,套筒套在光杆上。对接模块包括箱体,箱体前方固定有碰撞连接杆,丝杆与支撑架蜗轮蜗杆连接,丝杆两端由轴承座固定安装在箱体上,光杆固定在箱体上。本发明公开一种架空高压输电线路巡检机器人回收装置,结构简单
一种用于架空高压输电线路巡检的机器人.pdf
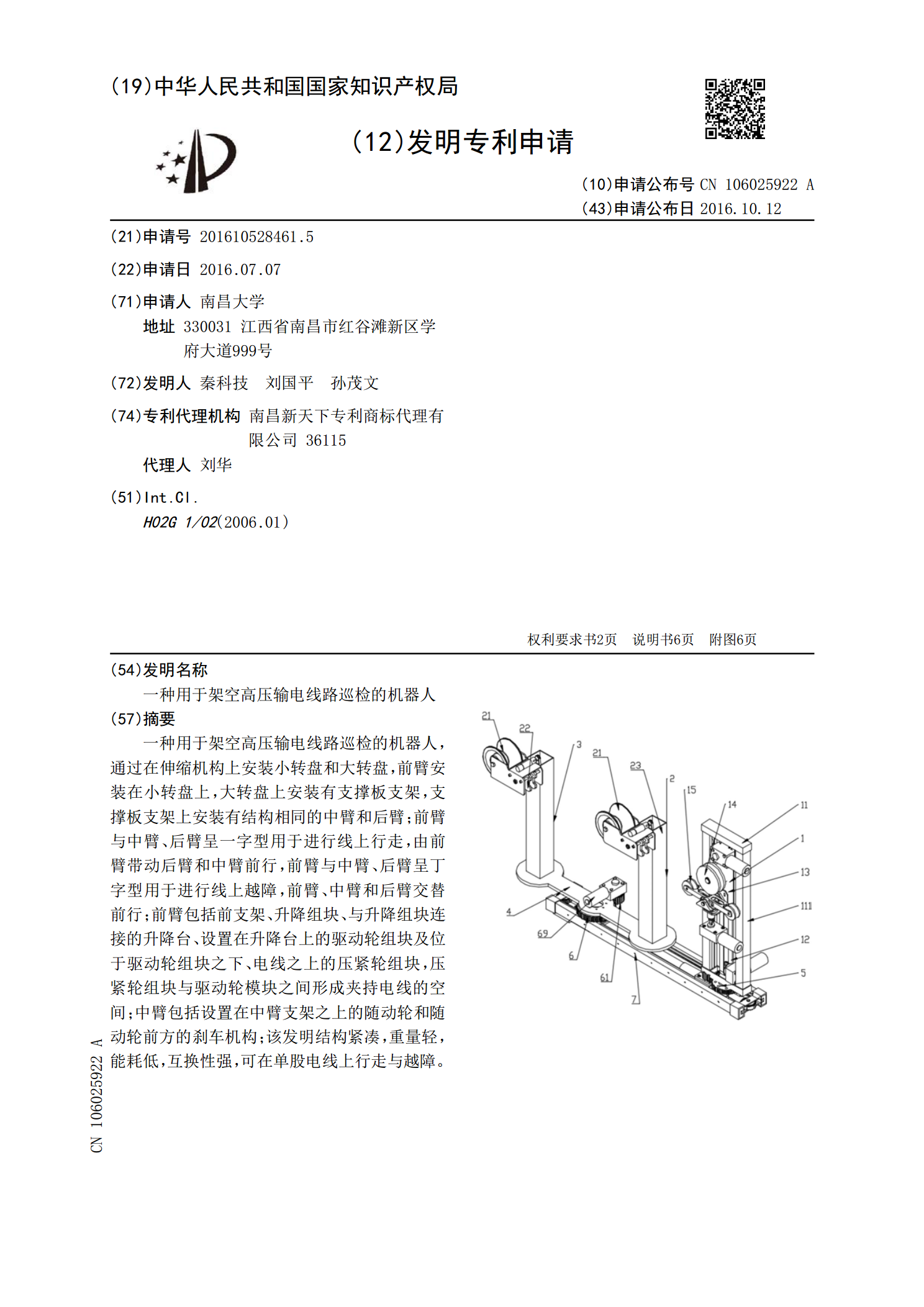
一种用于架空高压输电线路巡检的机器人,通过在伸缩机构上安装小转盘和大转盘,前臂安装在小转盘上,大转盘上安装有支撑板支架,支撑板支架上安装有结构相同的中臂和后臂;前臂与中臂、后臂呈一字型用于进行线上行走,由前臂带动后臂和中臂前行,前臂与中臂、后臂呈丁字型用于进行线上越障,前臂、中臂和后臂交替前行;前臂包括前支架、升降组块、与升降组块连接的升降台、设置在升降台上的驱动轮组块及位于驱动轮组块之下、电线之上的压紧轮组块,压紧轮组块与驱动轮模块之间形成夹持电线的空间;中臂包括设置在中臂支架之上的随动轮和随动轮前方的
一种架空输电线路的巡检机器人.pdf
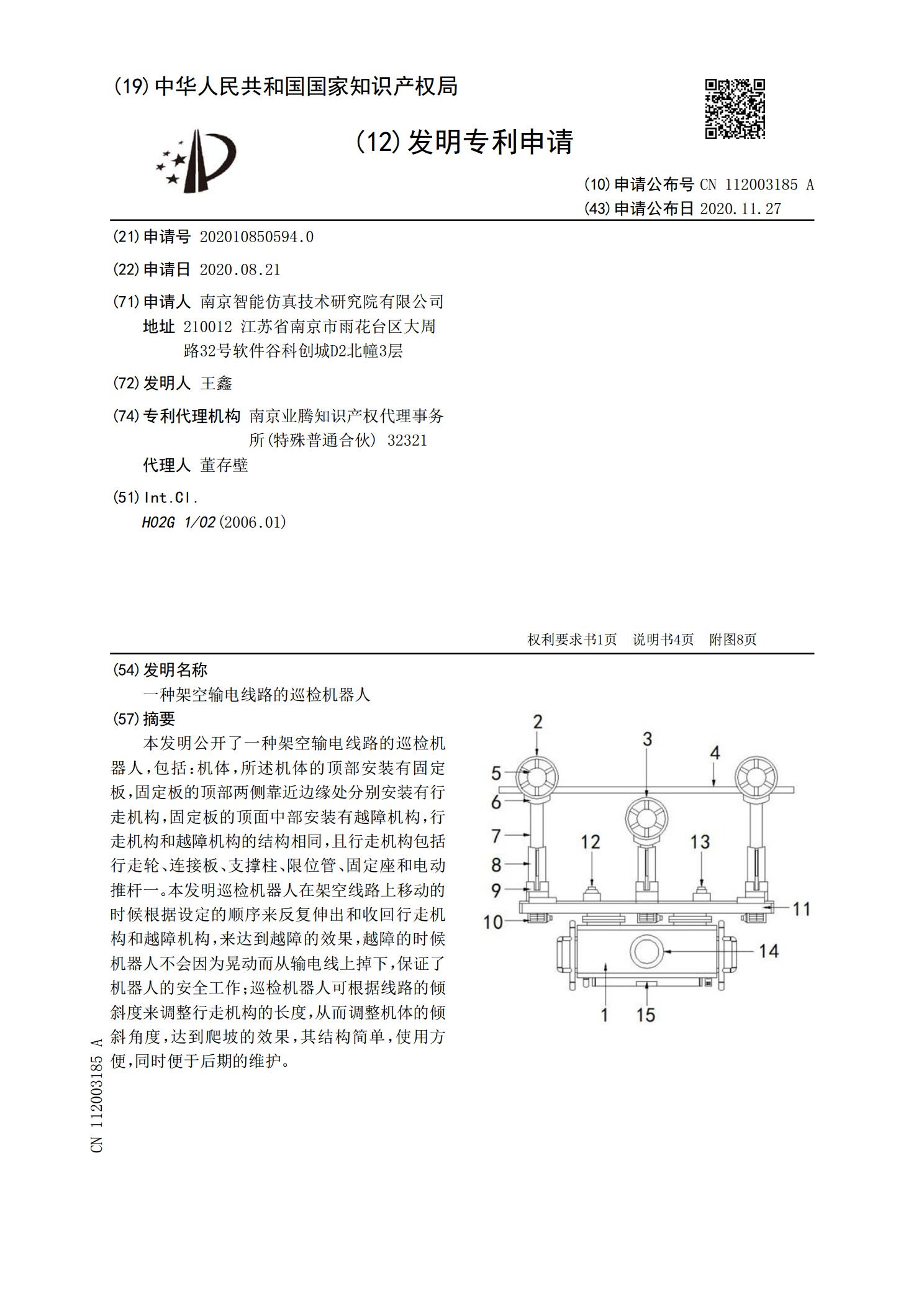
本发明公开了一种架空输电线路的巡检机器人,包括:机体,所述机体的顶部安装有固定板,固定板的顶部两侧靠近边缘处分别安装有行走机构,固定板的顶面中部安装有越障机构,行走机构和越障机构的结构相同,且行走机构包括行走轮、连接板、支撑柱、限位管、固定座和电动推杆一。本发明巡检机器人在架空线路上移动的时候根据设定的顺序来反复伸出和收回行走机构和越障机构,来达到越障的效果,越障的时候机器人不会因为晃动而从输电线上掉下,保证了机器人的安全工作;巡检机器人可根据线路的倾斜度来调整行走机构的长度,从而调整机体的倾斜角度,达到
一种架空输电线路巡检机器人越障装置及越障方法.pdf
本发明涉及一种架空输电线路巡检机器人越障装置及越障方法,其中越障装置包括巡检机器人机体、摆动机架、复位装置和驱动臂,所述摆动支架为两个,分别安装在巡检机器人机体两端,摆动支架可绕巡检机器人机体轴线运动,每个所述摆动机架的不同侧错位安装复位装置,每个复位装置连接有驱动臂,驱动臂可相对摆动机架转动。本发明的越障装置在越障过程中行走轮无需通过脱线实现跨越障碍物,可直接从障碍物上面或侧面越过,避免脱线而导致越障失败,巡检效率高,机器人运行平稳且可靠性高。

用于架空高压输电线路巡检机器人自动上下线的起吊装置.pdf
一种用于架空高压输电线路巡检机器人自动上下线的起吊装置,包括一开口朝下的U型支架,其两竖杆中空、内外两侧面(或其中一侧面)开有竖向开口,竖杆下端连接有一向内弯折并延伸的水平平台,竖杆的外侧上部固定有一个下弯的上弯钩;一螺母丝杆传动机构,其丝杆分别通过上下轴承可转动地支承在U型支架的中空竖杆内,丝杆的下端键连接一大齿轮,大齿轮与一可正反转动电动机的输出轴上的小齿轮啮合,电动机固定在竖杆下端的水平平台上;一滑块,套接在U型支架的竖杆外并通过竖向开口与所述螺母丝杆传动机构的螺母固定连接,滑块外侧固定有一上弯的下