
智能四轮驱动送餐车.pdf

Jo****63


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
智能四轮驱动送餐车.pdf
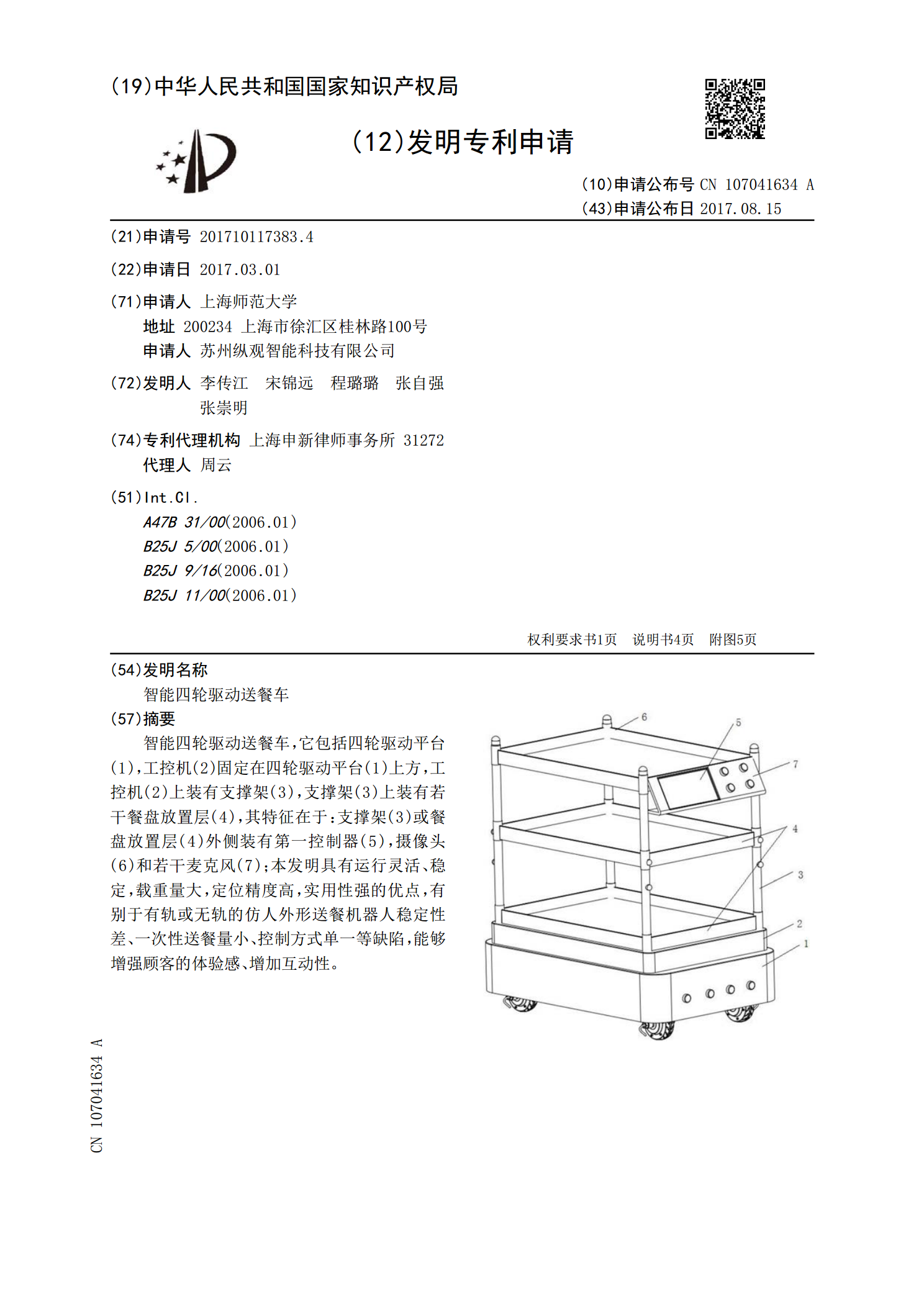
智能四轮驱动送餐车,它包括四轮驱动平台(1),工控机(2)固定在四轮驱动平台(1)上方,工控机(2)上装有支撑架(3),支撑架(3)上装有若干餐盘放置层(4),其特征在于:支撑架(3)或餐盘放置层(4)外侧装有第一控制器(5),摄像头(6)和若干麦克风(7);本发明具有运行灵活、稳定,载重量大,定位精度高,实用性强的优点,有别于有轨或无轨的仿人外形送餐机器人稳定性差、一次性送餐量小、控制方式单一等缺陷,能够增强顾客的体验感、增加互动性。

智能四轮驱动送餐车的控制方法.pdf
一种智能四轮驱动送餐车的控制方法,利用视觉导航算法与定位算法相结合来选定控制其行走送餐路线,遇到复杂路线时,直接通过自身的算法进行路线规划实现送餐车的自动行进。

智能外卖送餐车.pdf
智能外卖送餐车近两年来,由于外卖行业的持续高速发展,诞生了一批批“骑手”,与此同时也带来了一系列的社会问题,而近几年人工智能技术的发展,为人工智能配送外卖提供了可能,本文就对人工智能背景下的智能外卖送餐车进行浅析。标签:人工智能;外卖;送餐车;前景1外卖送餐事故频发近年来随着网络平台订餐的便利,外卖行业的兴起,吸引了一大批外卖骑手的入驻,随之而来的关于外卖小哥的交通事故也频频发生,外卖事故的多发一共有以下几点原因:(1)外卖行业对于送餐时间管理过于严苛,送餐超过预计的时间被打差评了就会扣工资,一个差评扣2

智能送餐车及其控制系统.pdf
本发明公开了一种智能送餐车控制系统,控制系统包括控制功能组、驱动功能组、传感功能组、无线功能组、显示操作功能组;一种含有上述控制系统的智能送餐车,包括车身、底架,所述车身中间设有菜品放置区,车身的两侧各设有一个广告展示区,在车身的上方固定有人机控制台;在底架和车身的连接处安装有激光传感器和超声波传感器,在底架的下方安装有万向轮和驱动轮。本发明通过控制系统和智能送餐车的结合使用能够实现多点送餐和餐盘回收功能,大大提高了智能送餐车的应用效率,可以有效帮助餐饮企业降低人工成本,采用SLAM激光导航算法实现了无轨
一种智能保温送餐车.pdf
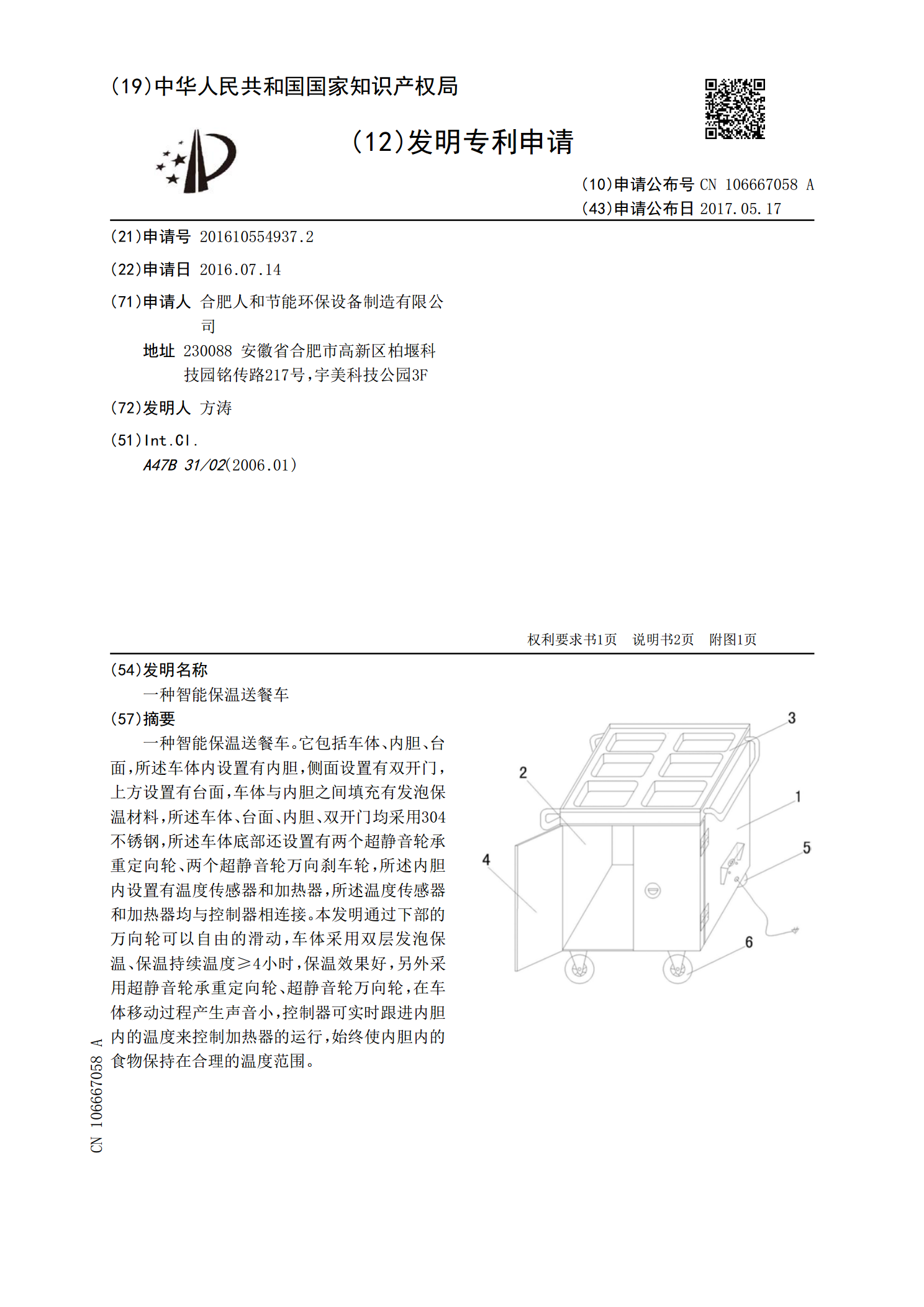
一种智能保温送餐车。它包括车体、内胆、台面,所述车体内设置有内胆,侧面设置有双开门,上方设置有台面,车体与内胆之间填充有发泡保温材料,所述车体、台面、内胆、双开门均采用304不锈钢,所述车体底部还设置有两个超静音轮承重定向轮、两个超静音轮万向刹车轮,所述内胆内设置有温度传感器和加热器,所述温度传感器和加热器均与控制器相连接。本发明通过下部的万向轮可以自由的滑动,车体采用双层发泡保温、保温持续温度≥4小时,保温效果好,另外采用超静音轮承重定向轮、超静音轮万向轮,在车体移动过程产生声音小,控制器可实时跟进内胆