
一种用于手部康复训练的柔性外骨骼手套系统.pdf

是你****平呀


1/10

2/10

3/10

4/10

5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于手部康复训练的柔性外骨骼手套系统.pdf
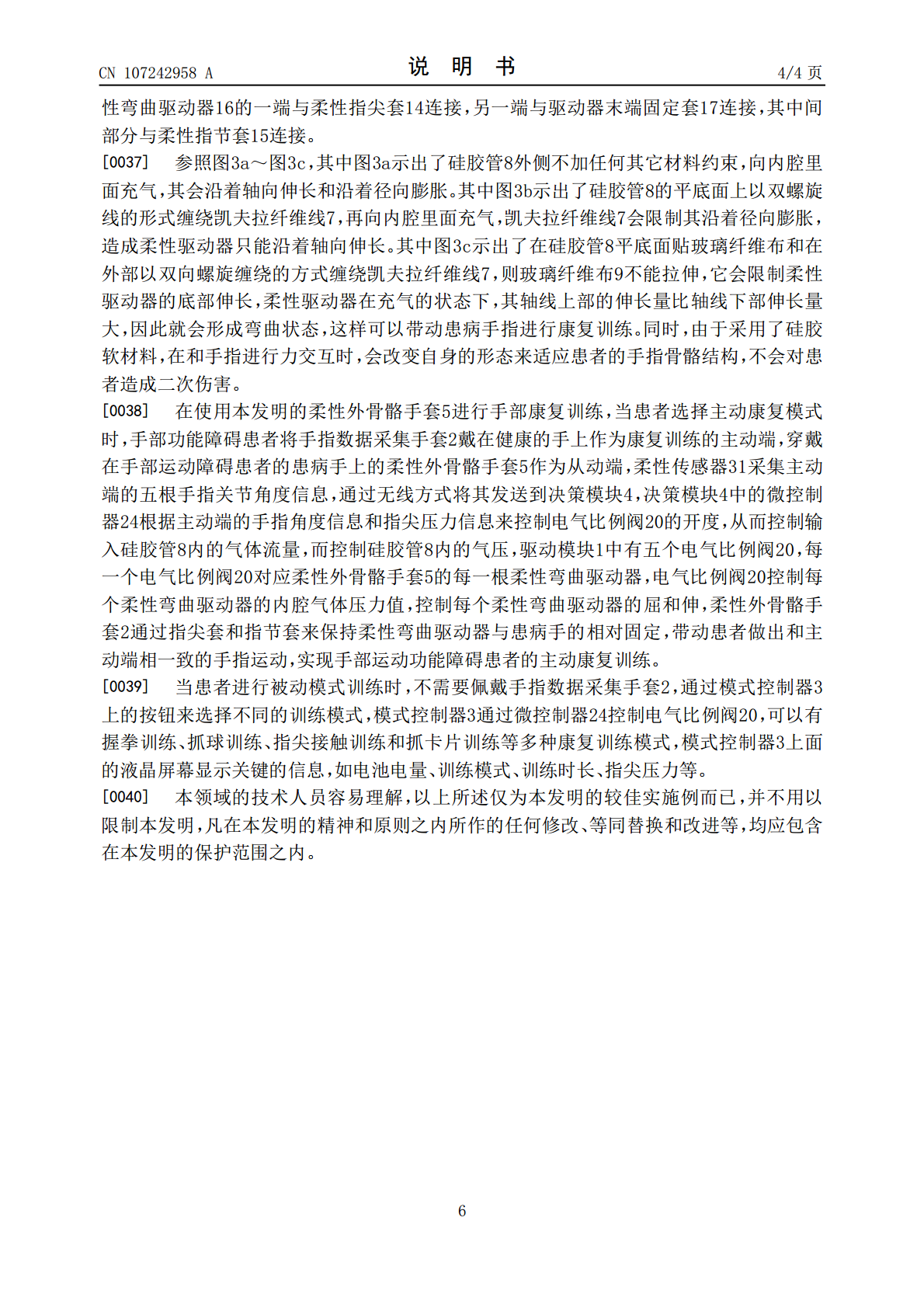
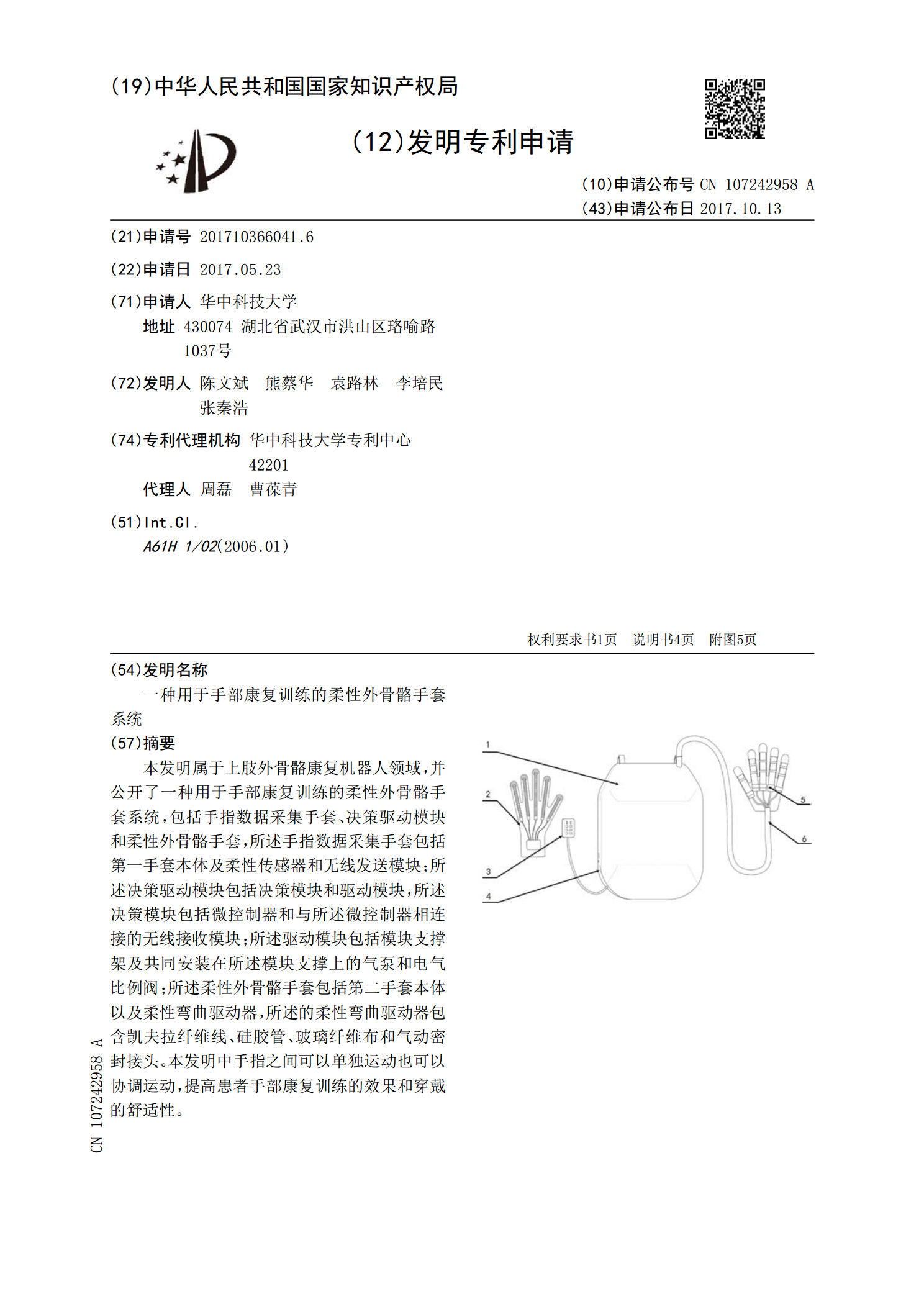
本发明属于上肢外骨骼康复机器人领域,并公开了一种用于手部康复训练的柔性外骨骼手套系统,包括手指数据采集手套、决策驱动模块和柔性外骨骼手套,所述手指数据采集手套包括第一手套本体及柔性传感器和无线发送模块;所述决策驱动模块包括决策模块和驱动模块,所述决策模块包括微控制器和与所述微控制器相连接的无线接收模块;所述驱动模块包括模块支撑架及共同安装在所述模块支撑上的气泵和电气比例阀;所述柔性外骨骼手套包括第二手套本体以及柔性弯曲驱动器,所述的柔性弯曲驱动器包含凯夫拉纤维线、硅胶管、玻璃纤维布和气动密封接头。本发明中

一种外骨骼手部康复训练装置.pdf
本发明提供一种外骨骼手部康复训练装置,旨在实现中风病人的手部康复训练,主要包括指部驱动装置、手部支承组件、腕部支承组件、电机驱动装置。指部驱动装置安装在手部支承组件上,手部支承组件和电机驱动装置安装在腕部支承组件上。本发明通过钢丝软轴组件将电机的动力传递到指部驱动装置上,通过齿轮传动实现指部关节的运动,能够独立的驱动四根手指,结构简单且易于实现,电机驱动装置后置以及钢丝软轴驱动的方式减轻了指部外骨骼结构的重量。本发明的指部驱动装置上有圆弧轨道结构,实现外骨骼装置的回转中心与手指关节的回转中心保持一致,指部

一种用于柔性外骨骼系统的驱动单元机构.pdf
本发明涉及一种用于柔性外骨骼系统的驱动单元机构,包括基座、保护壳、电路板外罩、驱动电机、卷轴、电机固定板、卷轴支撑架、两个传动齿轮、控制电路板和开关;基座用于固定保护壳、电机固定板及卷轴支撑架;保护壳为驱动单元机构提供保护支撑,并在其上安装固定控制电路板;电路板外罩用于保护电路板;驱动电机为卷轴的转动提供动力;卷轴安装于电机固定板与卷轴支撑架之间,其上缠绕安装柔性驱动带,用于髋关节助力;两个传动齿轮用于驱动电机与卷轴之间的动力传递;电机固定板用于安装驱动电机及卷轴;卷轴支撑架用于支撑卷轴;控制电路板采集人

一种用于手部外骨骼的套索传动装置.pdf
一种用于手部外骨骼的套索传动装置,包括控制盒,控制盒的一端固定有两个电机,电机输出轴上连接绕线盘,绕线盘缠绕有输入绳索,输入绳索和弹簧滑块机构输入端连接,弹簧滑块机构连接在直线导轨上,直线导轨固定在控制盒两侧;弹簧滑块机构输出端设有五个支路,每个支路通过一个中间绳索和一个动滑轮机构连接;动滑轮机构和输出绳索相连,输出绳索穿过输出绳套管和相应的手指执行机构相连,输出绳套管连接在控制盒的另一端外侧;本发明仅以两个电机作为驱动就能实现五个自由度的稳定输出,并且输出力大小可调,可用于控制手部外骨骼等康复设备实现物
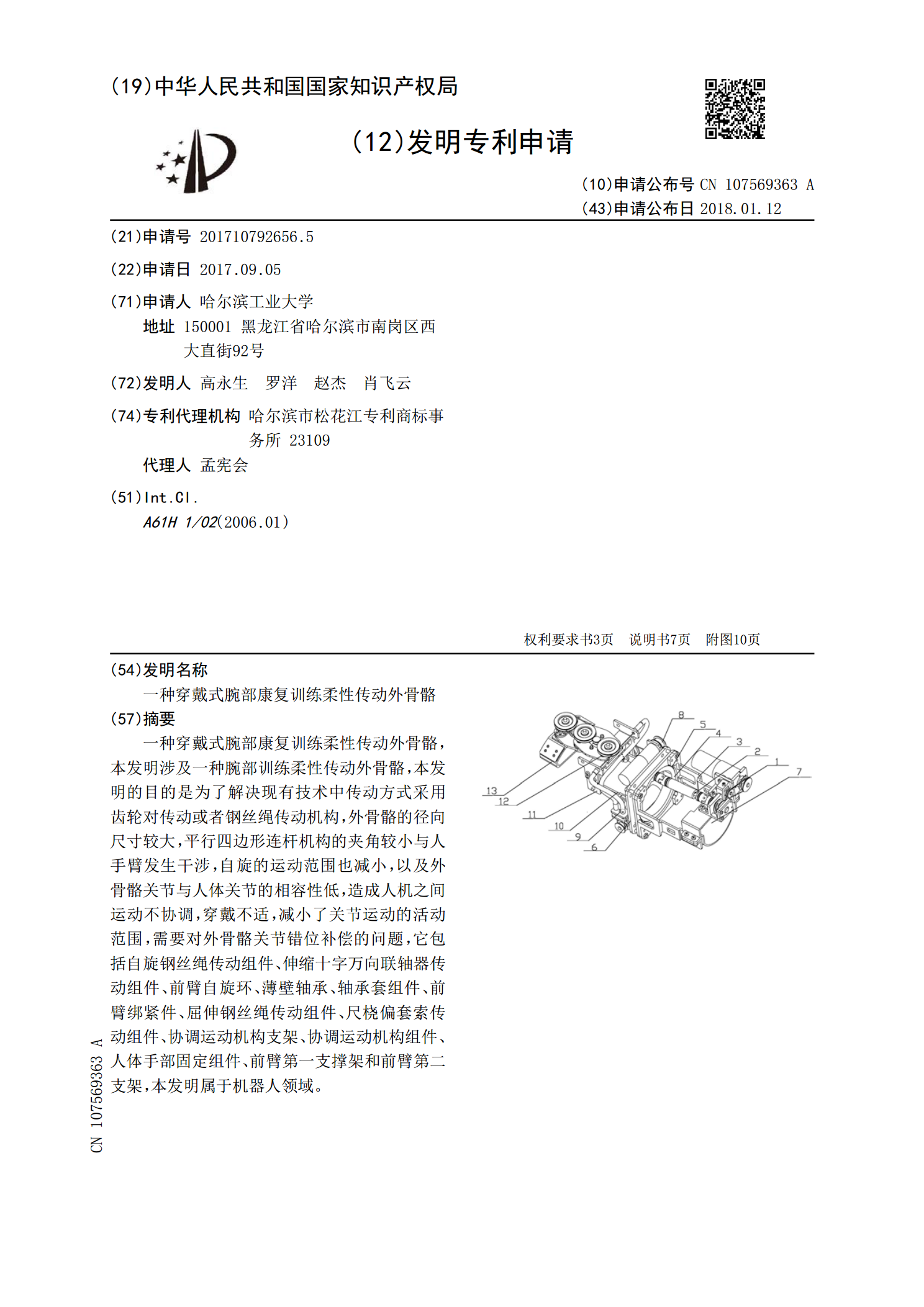
一种穿戴式腕部康复训练柔性传动外骨骼.pdf
一种穿戴式腕部康复训练柔性传动外骨骼,本发明涉及一种腕部训练柔性传动外骨骼,本发明的目的是为了解决现有技术中传动方式采用齿轮对传动或者钢丝绳传动机构,外骨骼的径向尺寸较大,平行四边形连杆机构的夹角较小与人手臂发生干涉,自旋的运动范围也减小,以及外骨骼关节与人体关节的相容性低,造成人机之间运动不协调,穿戴不适,减小了关节运动的活动范围,需要对外骨骼关节错位补偿的问题,它包括自旋钢丝绳传动组件、伸缩十字万向联轴器传动组件、前臂自旋环、薄壁轴承、轴承套组件、前臂绑紧件、屈伸钢丝绳传动组件、尺桡偏套索传动组件、协