
一种用于金属面爬壁机器人的磁吸附提升系统.pdf

St****36


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种用于金属面爬壁机器人的磁吸附提升系统.pdf
本发明公开了一种用于金属面爬壁机器人的磁吸附提升系统,包括四组提升子机构,两组提升子机构位于机器人对称两侧,每个提升子机构包括两个支撑架、通过轴承与所述两个支撑架底端连接的磁铁旋转架、固定在所述磁铁旋转架上的旋转架固定座、安装在所述磁铁旋转架上的磁铁、与旋转架固定座轴承连接的提升杆、与所述提升杆连接的H型中间杆和连架杆、与所述H型中间杆连接的主动杆。该提升装置可以满足金属面爬壁机器人的磁吸附稳定性,保证了连杆之间的旋转平稳性和快速性,实现了金属面爬壁机器人的磁吸附状态和磁力脱离状态的快速切换,在吸附状态时
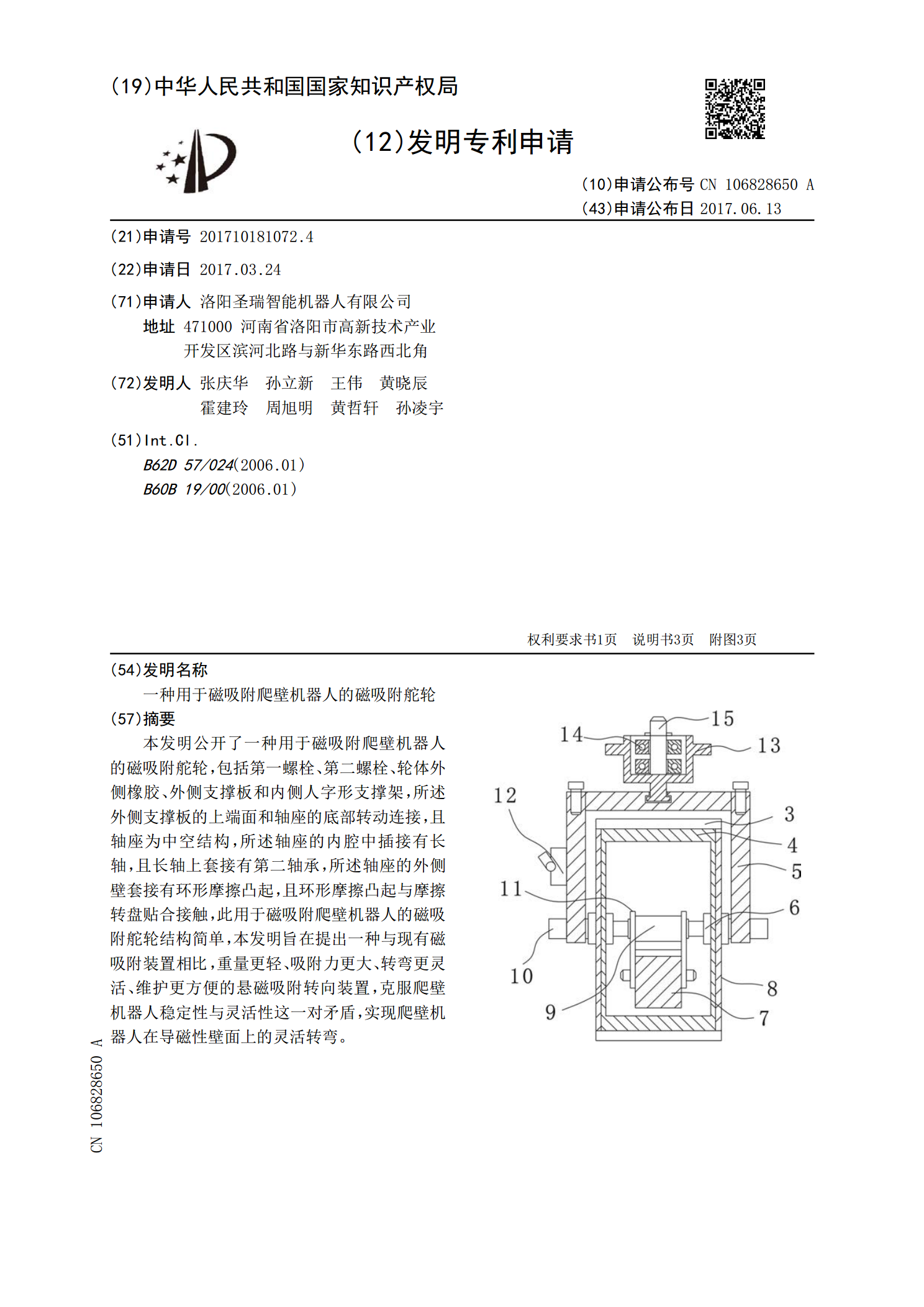
一种用于磁吸附爬壁机器人的磁吸附舵轮.pdf
本发明公开了一种用于磁吸附爬壁机器人的磁吸附舵轮,包括第一螺栓、第二螺栓、轮体外侧橡胶、外侧支撑板和内侧人字形支撑架,所述外侧支撑板的上端面和轴座的底部转动连接,且轴座为中空结构,所述轴座的内腔中插接有长轴,且长轴上套接有第二轴承,所述轴座的外侧壁套接有环形摩擦凸起,且环形摩擦凸起与摩擦转盘贴合接触,此用于磁吸附爬壁机器人的磁吸附舵轮结构简单,本发明旨在提出一种与现有磁吸附装置相比,重量更轻、吸附力更大、转弯更灵活、维护更方便的悬磁吸附转向装置,克服爬壁机器人稳定性与灵活性这一对矛盾,实现爬壁机器人在导磁

一种用于爬壁机器人的磁吸附轮.pdf
一种用于爬壁机器人的磁吸附轮,在转轴外固定有阵列磁环,阵列磁环包括若干组磁阵列单元,每组磁阵列单元依次包括N极向心到S极的径向磁块、N极到S极的顺时针环向磁块、N极外向心到S极的径向磁块,N板到S极的逆时针环向磁块。磁吸附轮通过内部的永磁单元Halbach阵列原理进行排列,而通过本发明这种排列,可以最大化地增强磁吸附力。

一种磁吸附爬壁机器人系统.pdf
本发明公开了一种磁吸附爬壁机器人系统,属于自动化设备的技术领域,包括导磁轮、车体和磁力控制装置,所述导磁轮设置在所述车体下方,所述磁力控制装置设置在所述导磁轮内,用于控制所述导磁轮周围的磁场强度变化。本发明利用磁场叠加原理,通过控制电磁铁线圈电流的大小和方向,从而控制电磁铁磁场强度的大小和方向,实现磁极面上磁场强度的相加和相消,有效地实现导磁轮磁力的吸附与卸载的目的,方便于拆装卸载爬壁机器人。
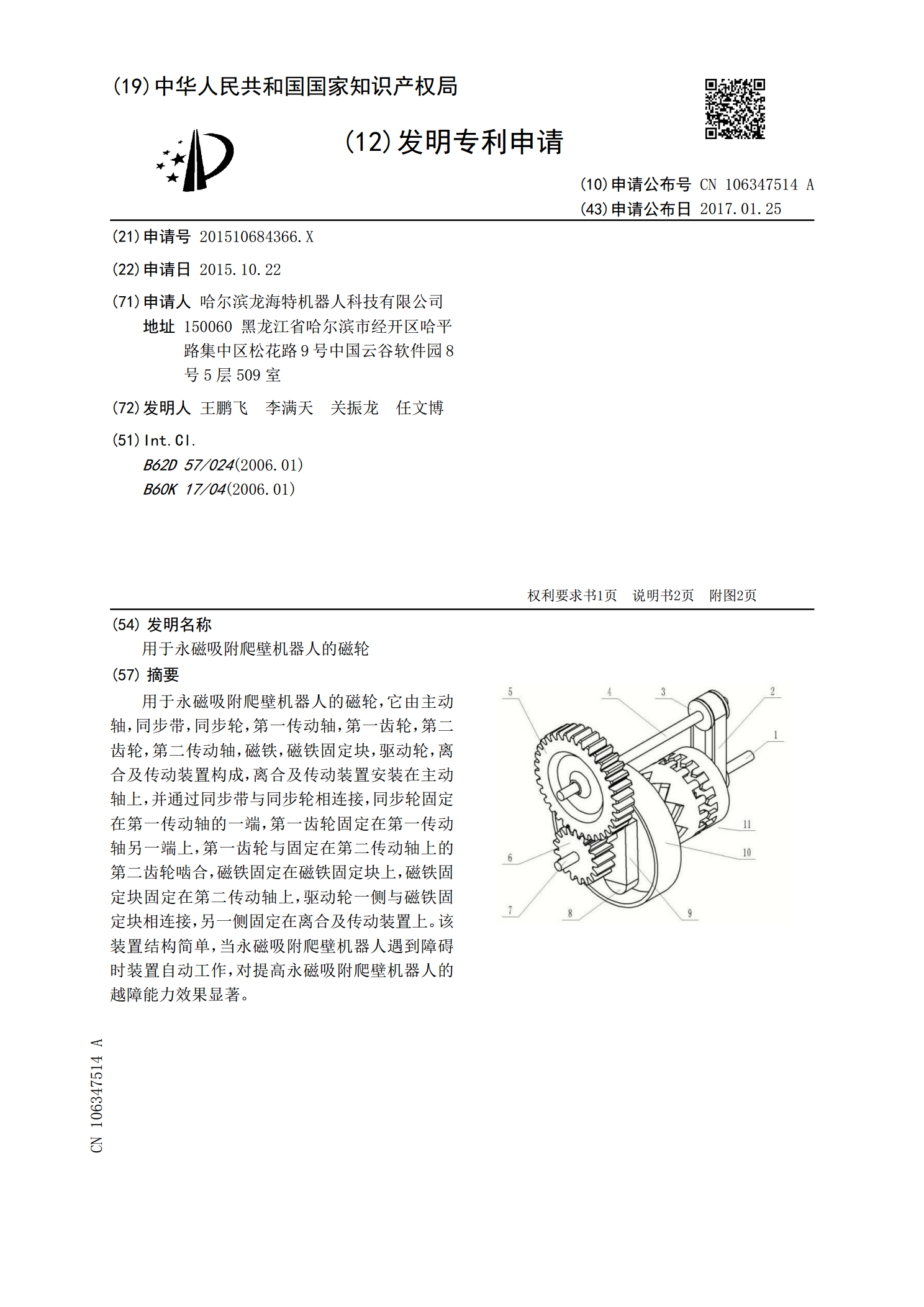
用于永磁吸附爬壁机器人的磁轮.pdf
用于永磁吸附爬壁机器人的磁轮,它由主动轴,同步带,同步轮,第一传动轴,第一齿轮,第二齿轮,第二传动轴,磁铁,磁铁固定块,驱动轮,离合及传动装置构成,离合及传动装置安装在主动轴上,并通过同步带与同步轮相连接,同步轮固定在第一传动轴的一端,第一齿轮固定在第一传动轴另一端上,第一齿轮与固定在第二传动轴上的第二齿轮啮合,磁铁固定在磁铁固定块上,磁铁固定块固定在第二传动轴上,驱动轮一侧与磁铁固定块相连接,另一侧固定在离合及传动装置上。该装置结构简单,当永磁吸附爬壁机器人遇到障碍时装置自动工作,对提高永磁吸附爬壁机器