
一种物流取码系统分拣装置及其分拣方法.pdf

映雁****魔王

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种物流取码系统分拣装置及其分拣方法.pdf
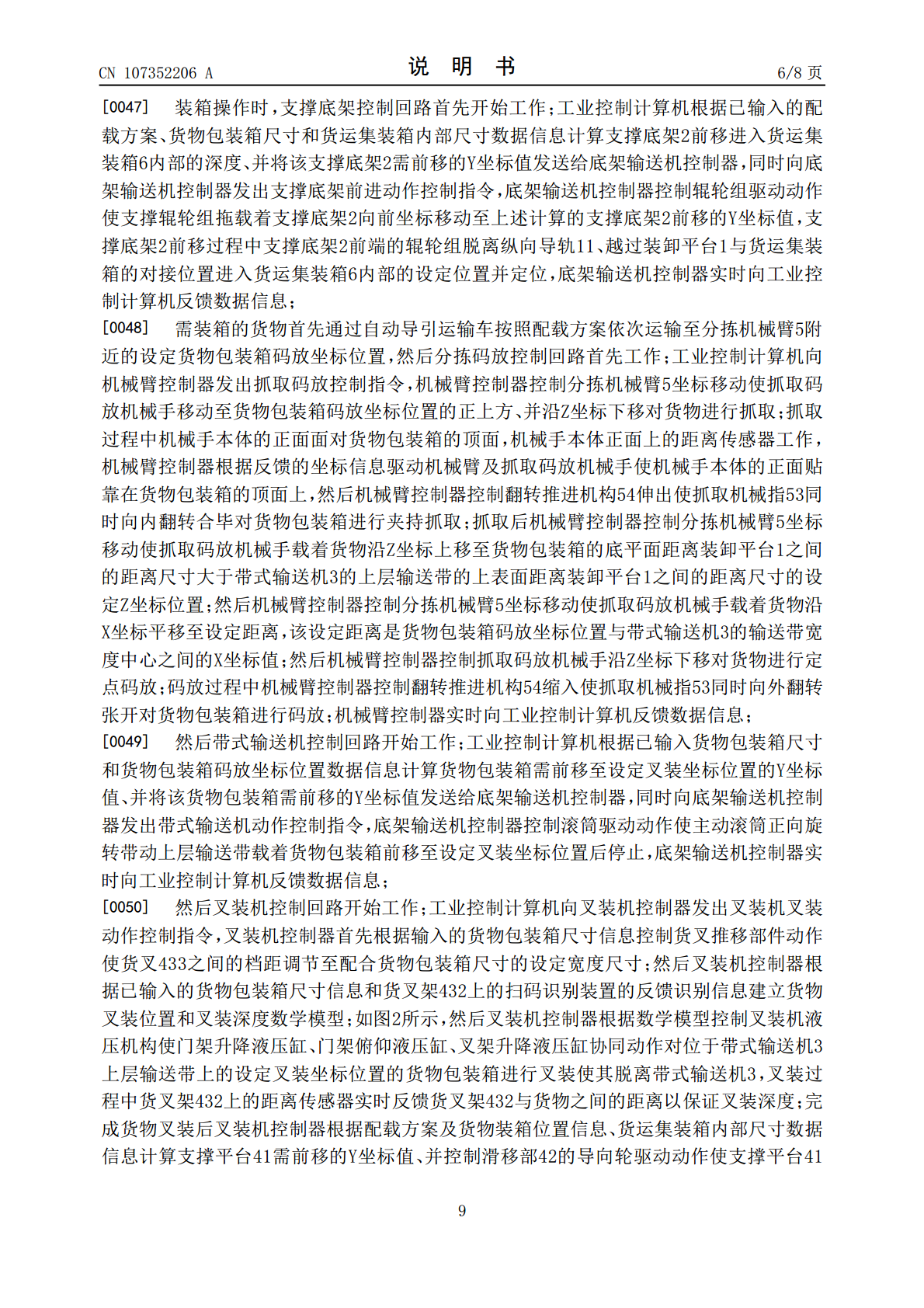
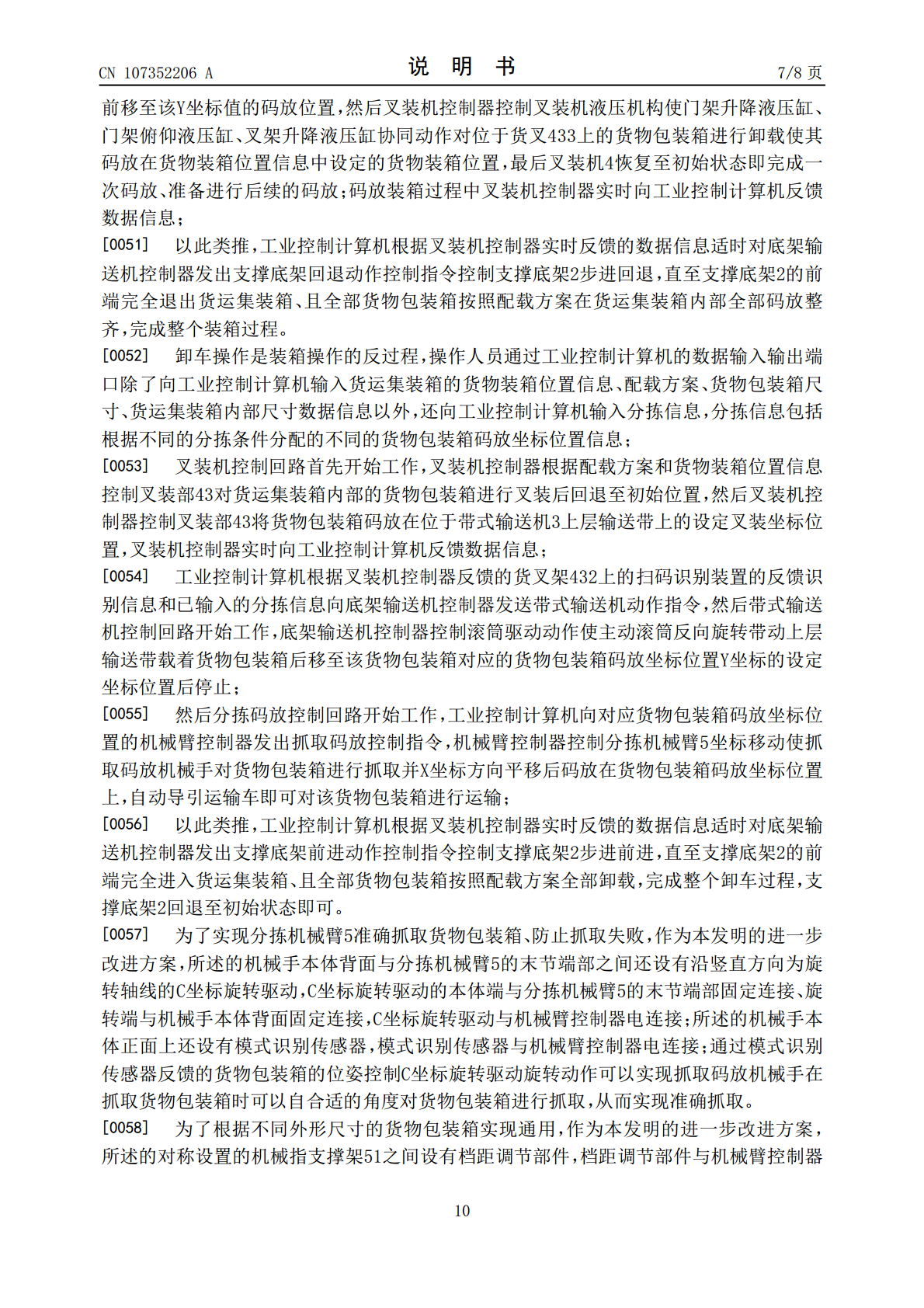
本发明公开了一种物流取码系统分拣装置及其分拣方法,分拣装置包括沿物流取码系统装卸装置长度方向设置在物流取码系统装卸装置左侧和/或右侧的多个分拣机械臂和机械臂电控机构;分拣机械臂架设安装在装卸平台上,分拣机械臂至少包括X坐标驱动、Y坐标驱动和Z坐标驱动,分拣机械臂的末节设有抓取码放机械手;抓取码放机械手包括机械手本体、机械指支撑架、铰接座、抓取机械指和翻转推进机构;机械臂电控机构包括机械臂控制器、与机械臂控制器电连接的机械臂动力电源、抓取码放控制回路。本物流取码系统分拣装置自动化程度较高,能够实现智能操作、
一种物流包裹智能分拣系统及其分拣方法.pdf
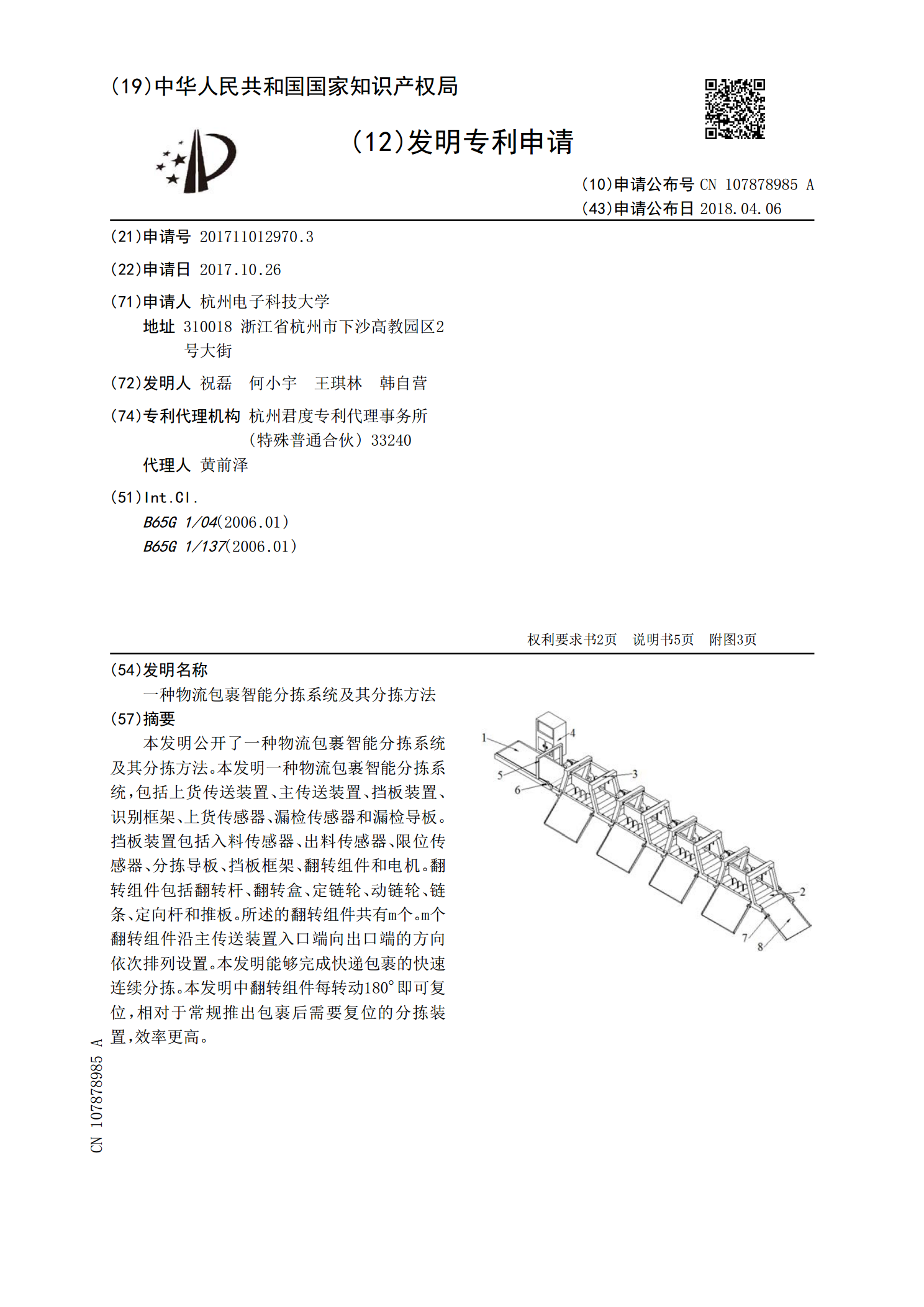
本发明公开了一种物流包裹智能分拣系统及其分拣方法。本发明一种物流包裹智能分拣系统,包括上货传送装置、主传送装置、挡板装置、识别框架、上货传感器、漏检传感器和漏检导板。挡板装置包括入料传感器、出料传感器、限位传感器、分拣导板、挡板框架、翻转组件和电机。翻转组件包括翻转杆、翻转盒、定链轮、动链轮、链条、定向杆和推板。所述的翻转组件共有m个。m个翻转组件沿主传送装置入口端向出口端的方向依次排列设置。本发明能够完成快递包裹的快速连续分拣。本发明中翻转组件每转动180°即可复位,相对于常规推出包裹后需要复位的分拣装

一种物流分拣系统及物流分拣方法.pdf
本发明公开了一种物流分拣系统及物流分拣方法,待寄货物放在堆放区域中,并将含有收件人地址的RFID标签贴在待寄货物上,人工或机器搬运待寄件逐至输送线上,待寄货物在输送线上运行时,会经过RFID阅读器、摄像头模组和传感器,RFID阅读器读取RFID标签内的信息确认寄出线路正确,摄像头模组拍摄得出图像信息并与数据库内的待寄货物的图像预设阈值信息对比确认寄出货物正确,传感器通过计数器计算货物数量并与数据库的货物预设数量值对比确认货物数量正确,寄件进行分类,有效降低人工分拣的出错率。
物流分拣系统及其分拣方法与设计方案.pdf
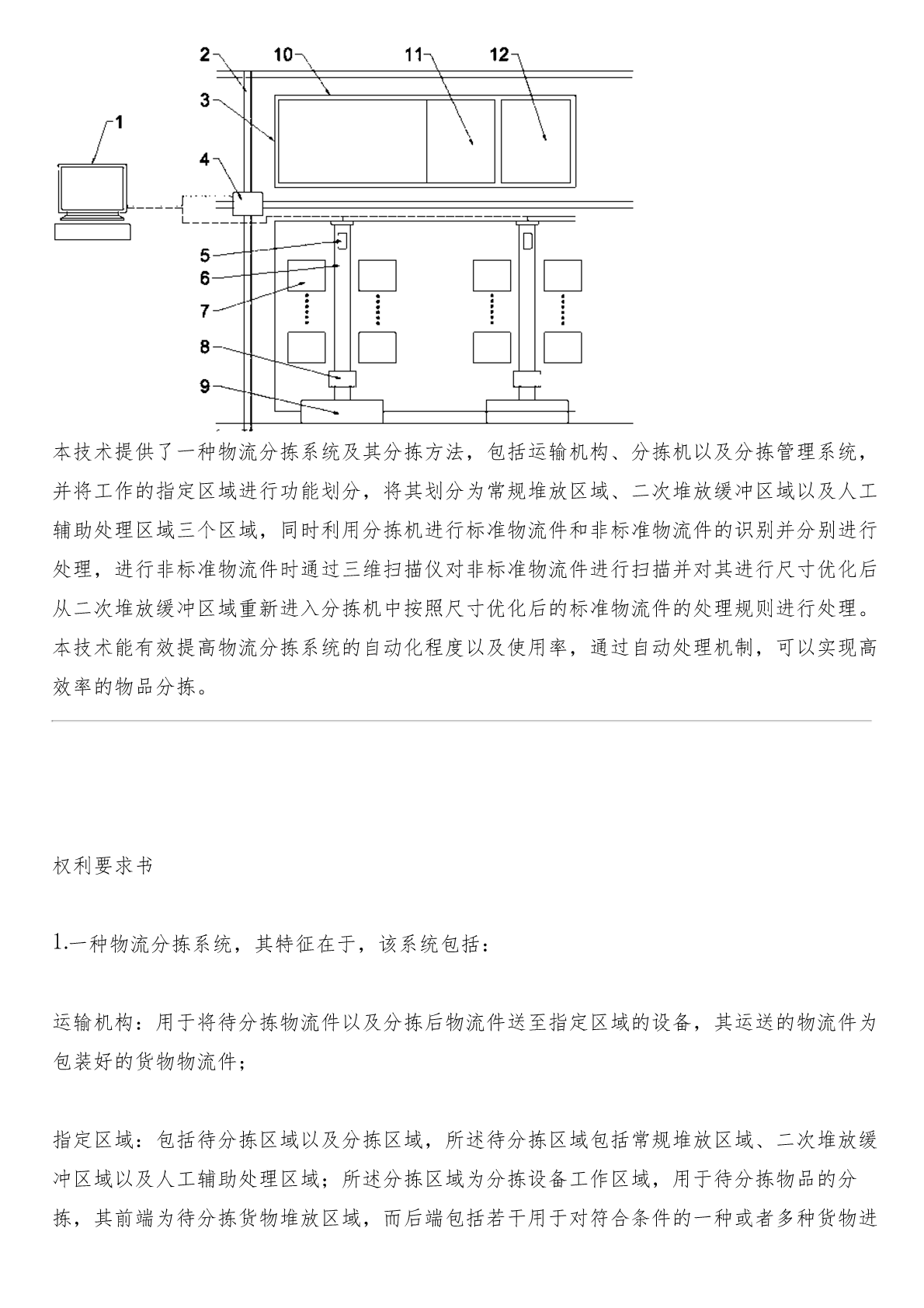
本技术提供了一种物流分拣系统及其分拣方法,包括运输机构、分拣机以及分拣管理系统,并将工作的指定区域进行功能划分,将其划分为常规堆放区域、二次堆放缓冲区域以及人工辅助处理区域三个区域,同时利用分拣机进行标准物流件和非标准物流件的识别并分别进行处理,进行非标准物流件时通过三维扫描仪对非标准物流件进行扫描并对其进行尺寸优化后从二次堆放缓冲区域重新进入分拣机中按照尺寸优化后的标准物流件的处理规则进行处理。本技术能有效提高物流分拣系统的自动化程度以及使用率,通过自动处理机制,可以实现高效率的物品分拣。权利要求书1.
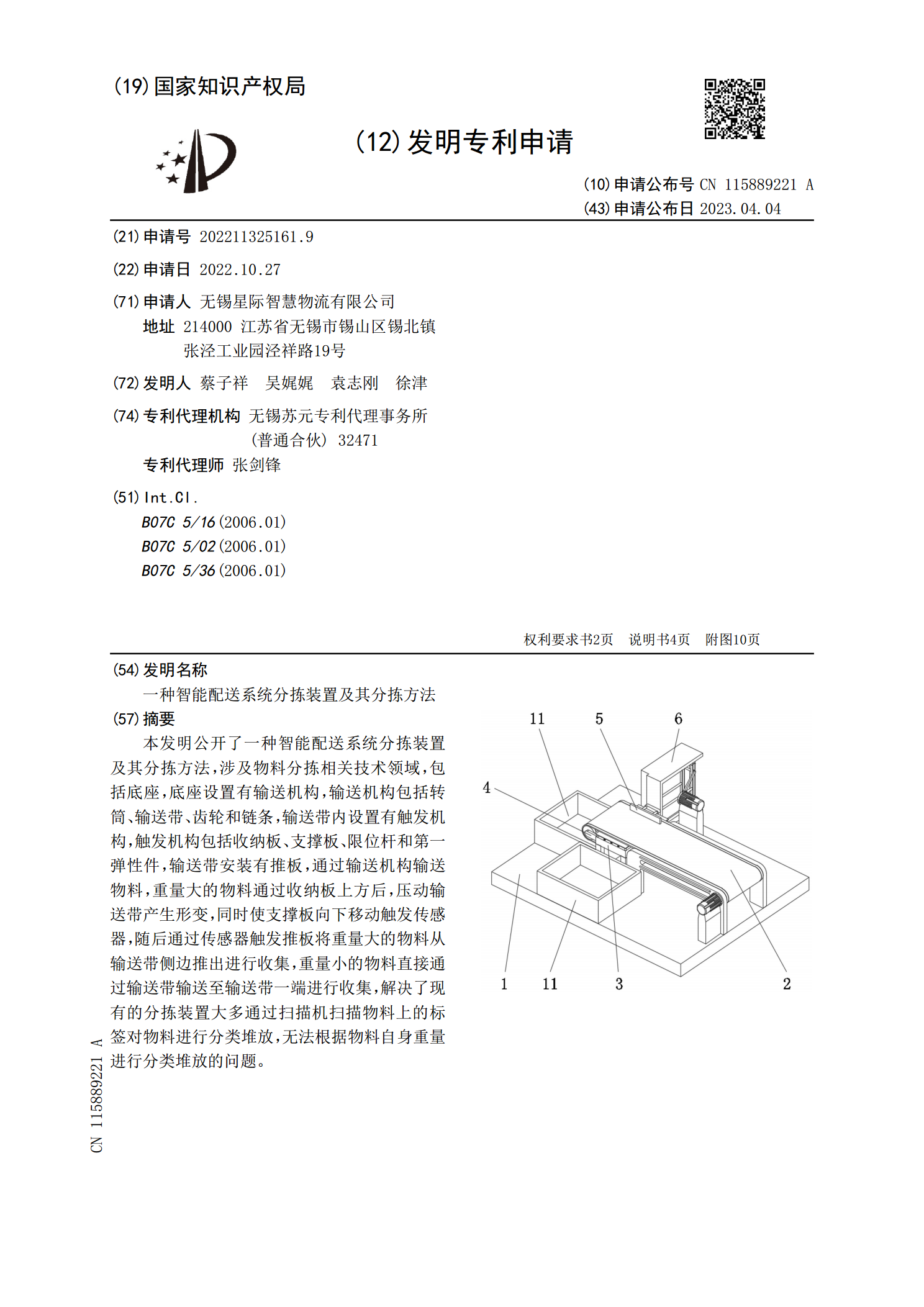
一种智能配送系统分拣装置及其分拣方法.pdf
本发明公开了一种智能配送系统分拣装置及其分拣方法,涉及物料分拣相关技术领域,包括底座,底座设置有输送机构,输送机构包括转筒、输送带、齿轮和链条,输送带内设置有触发机构,触发机构包括收纳板、支撑板、限位杆和第一弹性件,输送带安装有推板,通过输送机构输送物料,重量大的物料通过收纳板上方后,压动输送带产生形变,同时使支撑板向下移动触发传感器,随后通过传感器触发推板将重量大的物料从输送带侧边推出进行收集,重量小的物料直接通过输送带输送至输送带一端进行收集,解决了现有的分拣装置大多通过扫描机扫描物料上的标签对物料进