
架空输电线路地线自主变向行驶巡检机器人、系统及方法.pdf

光誉****君哥


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

架空输电线路地线自主变向行驶巡检机器人、系统及方法.pdf
本发明公开了一种架空输电线路地线自主变向行驶巡检机器人、系统及方法,机器人具有驱动臂机构,所述驱动臂机构包括驱动轮、从动轮、旋转关节和支撑架,所述驱动轮和从动轮布设于支撑架上,支撑架底部设置于旋转关节上,随旋转关节转动,从动轮沿支撑架进行竖直运动,旋转关节上设置有限位机构,通过其对旋转关节的卡合或释放,使支撑架带动驱动轮和从动轮适应轨道的曲率变换,实现其始终沿地线移动运行。本发明的辅助通道提高了机器人变向的效率,可有效解决机器人跨越耐张塔等障碍物的难题。

沿架空输电线路地线自主变向跨越耐张塔的巡检机器人及方法.pdf
本发明公开了一种沿架空输电线路地线自主变向跨越耐张塔的巡检机器人及方法,机器人包括多个并列分布的驱动臂,以及锁紧装置和控制箱,驱动臂下端设置有锁紧装置,锁紧装置固定于机器人控制箱上,控制箱位于机器人底部;驱动臂包括机械臂、驱动轮、从动轮和旋转关节,驱动轮和从动轮布设于机械臂上,机械臂可绕旋转关节转动,且驱动轮、从动轮和旋转关节的中心位于同一轴线上;锁紧装置与旋转关节位于一个平面上,控制旋转关节的卡合与释放。本发明通过地线无障碍通道与机器人的配合,能够提高机器人安全通过输电线障碍物的效率,提高巡检效率。
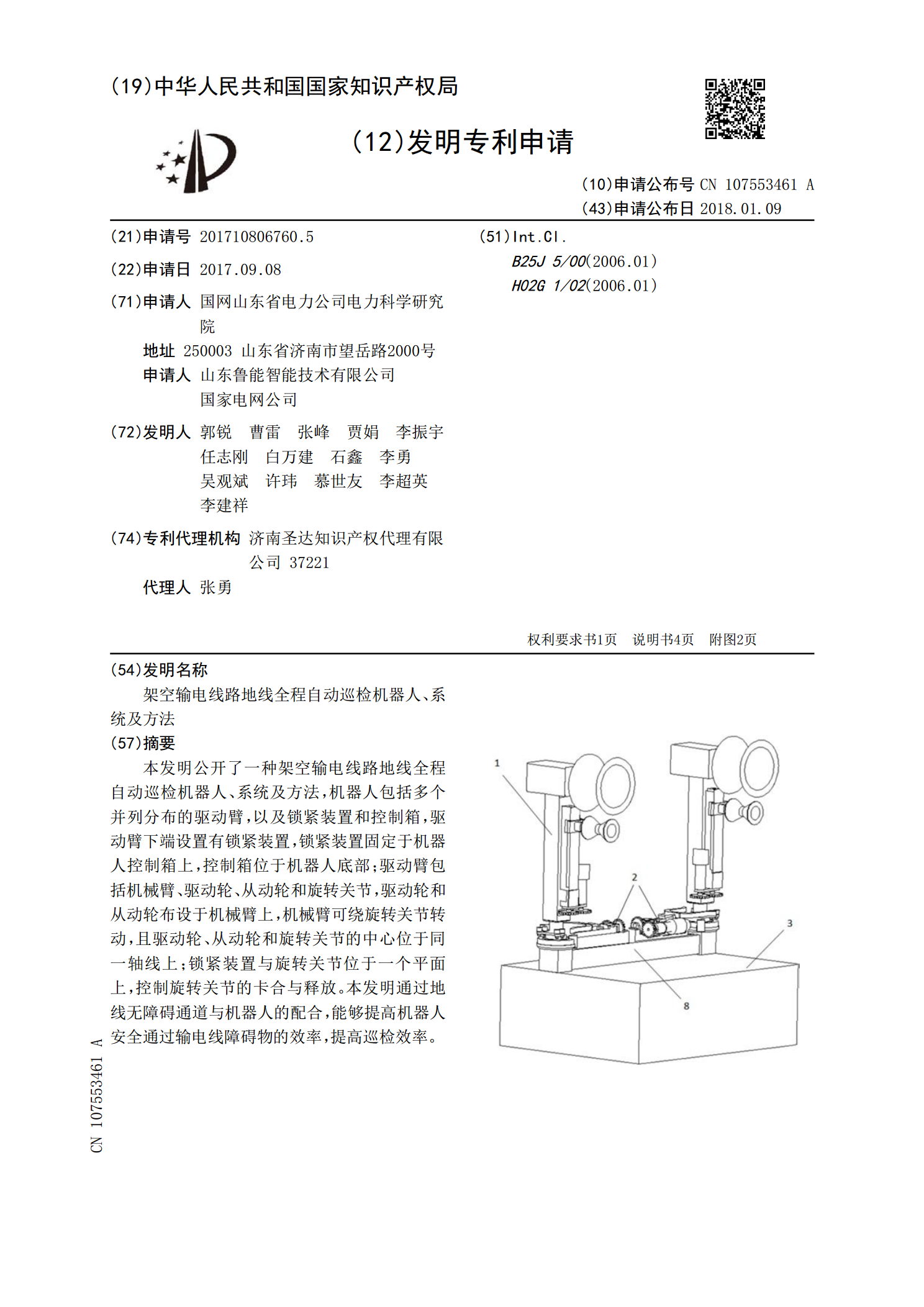
架空输电线路地线全程自动巡检机器人、系统及方法.pdf
本发明公开了一种架空输电线路地线全程自动巡检机器人、系统及方法,机器人包括多个并列分布的驱动臂,以及锁紧装置和控制箱,驱动臂下端设置有锁紧装置,锁紧装置固定于机器人控制箱上,控制箱位于机器人底部;驱动臂包括机械臂、驱动轮、从动轮和旋转关节,驱动轮和从动轮布设于机械臂上,机械臂可绕旋转关节转动,且驱动轮、从动轮和旋转关节的中心位于同一轴线上;锁紧装置与旋转关节位于一个平面上,控制旋转关节的卡合与释放。本发明通过地线无障碍通道与机器人的配合,能够提高机器人安全通过输电线障碍物的效率,提高巡检效率。
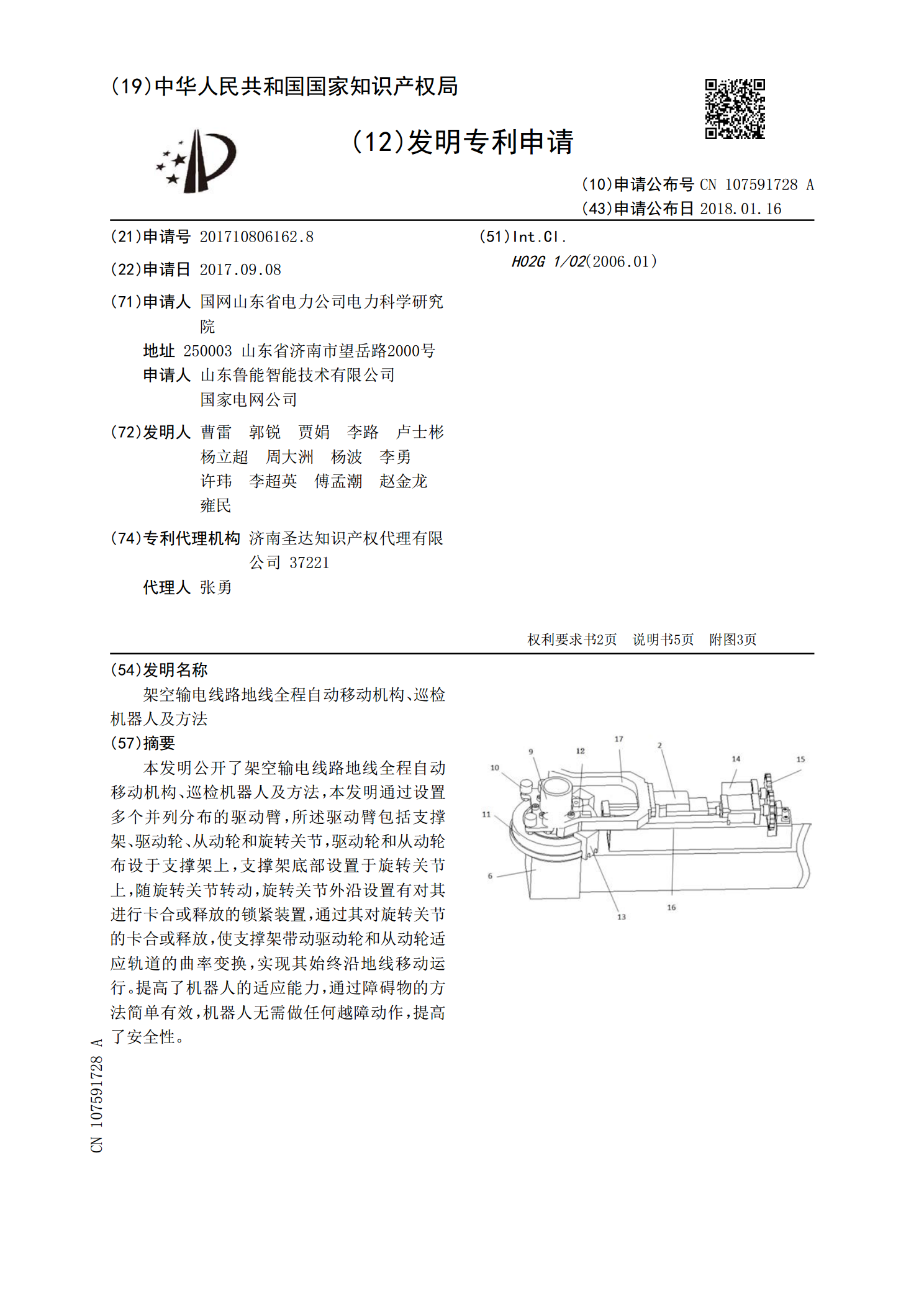
架空输电线路地线全程自动移动机构、巡检机器人及方法.pdf
本发明公开了架空输电线路地线全程自动移动机构、巡检机器人及方法,本发明通过设置多个并列分布的驱动臂,所述驱动臂包括支撑架、驱动轮、从动轮和旋转关节,驱动轮和从动轮布设于支撑架上,支撑架底部设置于旋转关节上,随旋转关节转动,旋转关节外沿设置有对其进行卡合或释放的锁紧装置,通过其对旋转关节的卡合或释放,使支撑架带动驱动轮和从动轮适应轨道的曲率变换,实现其始终沿地线移动运行。提高了机器人的适应能力,通过障碍物的方法简单有效,机器人无需做任何越障动作,提高了安全性。

架空输电线路巡检机器人发展研究.pptx
,目录PartOnePartTwo定义与功能机器人类型与特点机器人应用场景PartThree技术起源与背景技术发展阶段技术发展趋势PartFour机器人本体设计传感器技术导航与定位技术机器学习与人工智能技术PartFive应用现状概述典型应用案例分析现有问题与挑战PartSix技术创新方向市场发展前景对行业的推动作用社会经济效益分析THANKS