
一种自适应减振上板机.pdf

玄静****写意


1/7
2/7
3/7
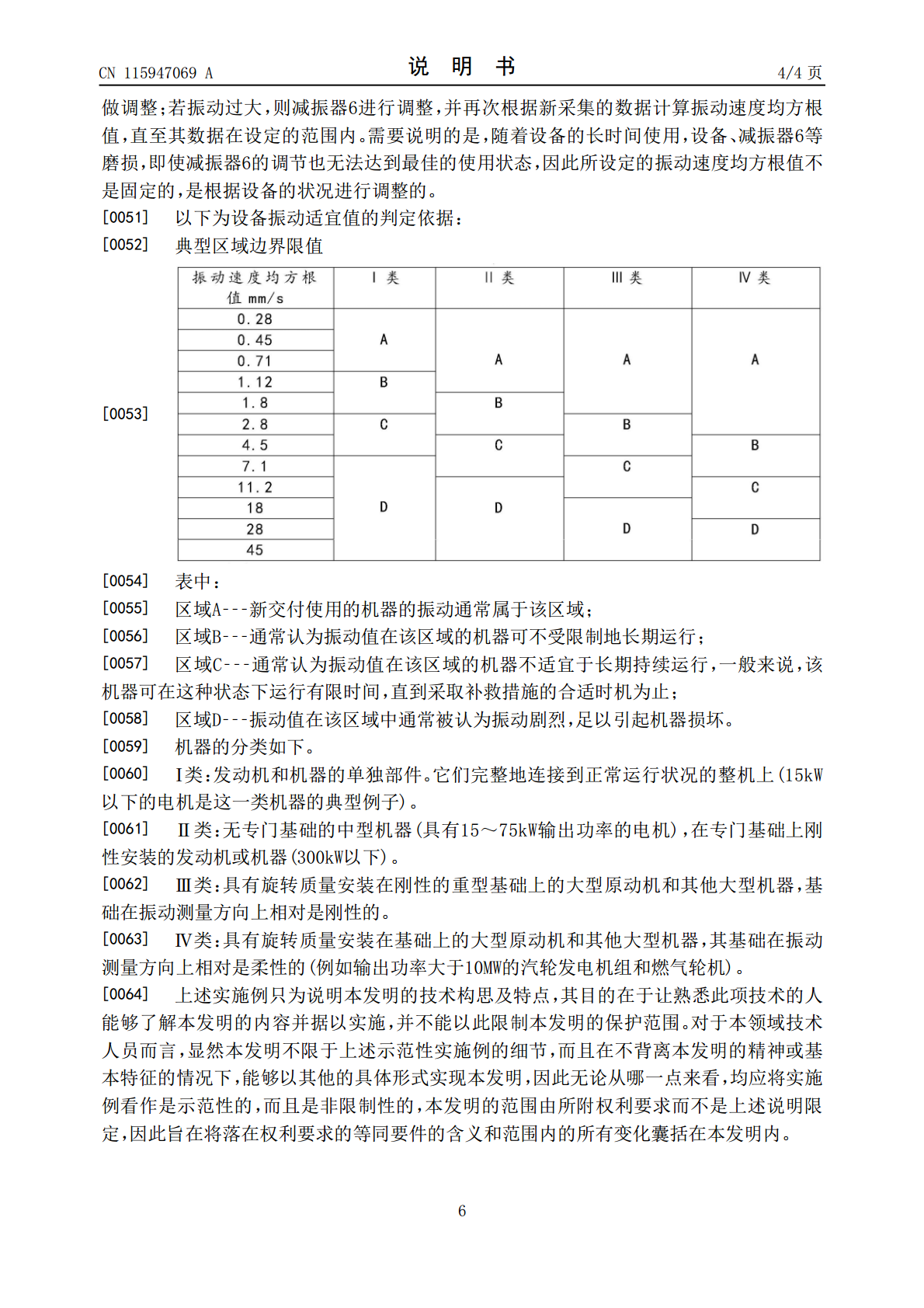
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种自适应减振上板机.pdf
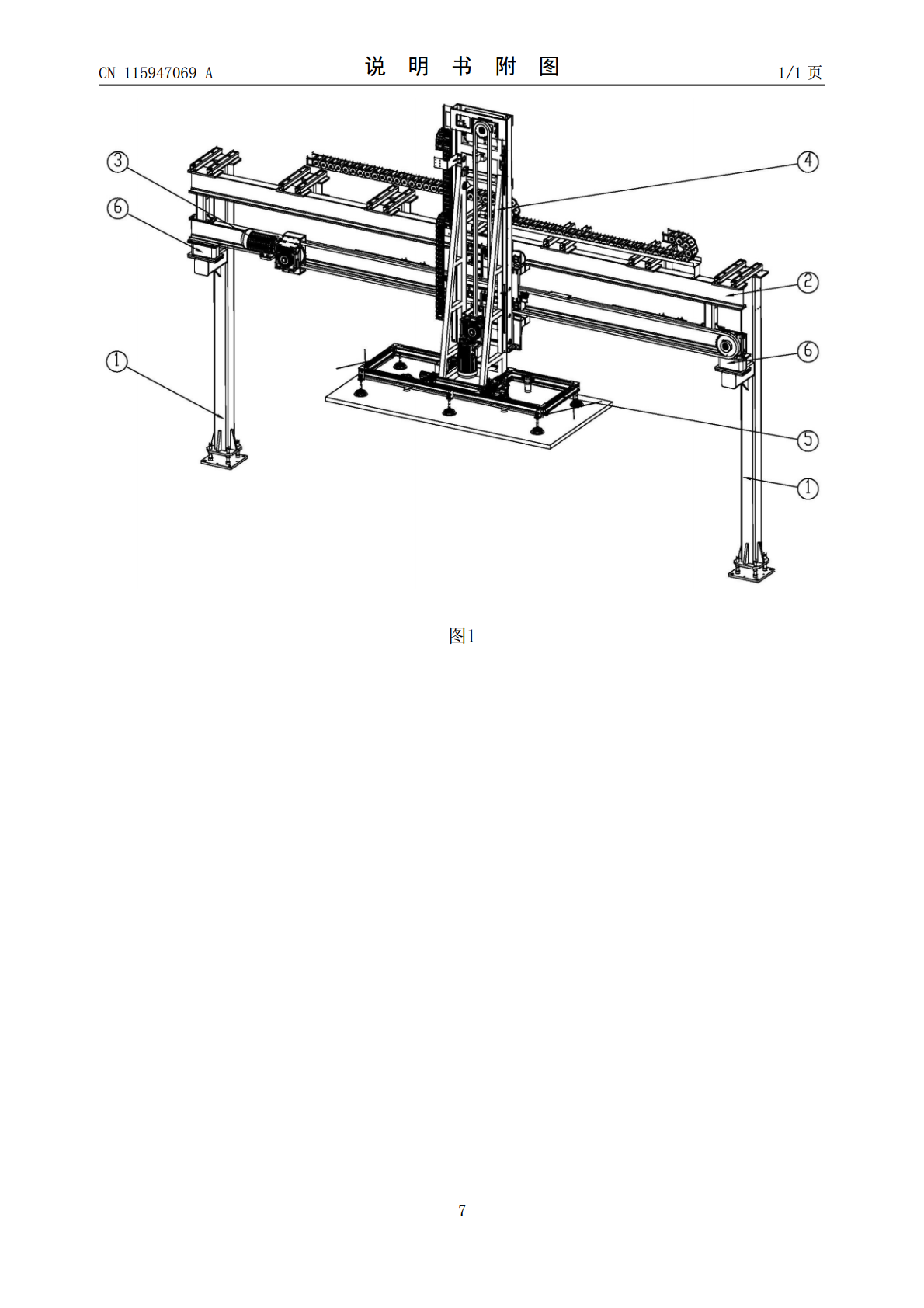
本发明涉及一种自适应减振上板机,包括竖支柱,所述竖支柱上有水平设置的导轨,所述导轨上设置有Y轴升降机构和可驱动Y轴升降机构沿导轨运行的X轴运动电机,所述Y轴升降机构上设置有吸盘组件,以对板料进行吸附;其中,所述导轨和竖支柱之间设置有减振器,其可自动调整刚性,使机构的振动值适宜正常运行。在Z轴升降机构在导轨上运动时,使机构产生振动,安装在导轨下部的自适应减振器通过相应的算法,自动计算调整刚性,使机构的振动值处于适宜长期运行的区域,保证设备的正常运行,且通过减低振动,延长设备的实用寿命。
一种自适应多维多级减振装置.pdf
本发明公开了一种自适应多维多级减振装置,弥补传统单一方法控制的缺陷,将被动控制和半主动控制有机结合在一起形成多级控制,既可以弥补被动控制在强度和频带宽度方面的局限性,又能够确保控制的自适应性和可调节性,在节约能量输入的前提下达到良好的减振控制效果。其技术方案为:包括工作箱,所述工作箱顶部安装滑动机构,且滑动机构能够沿工作箱移动;所述滑动机构通过置于工作箱内部的伸缩柱连接惯性质量体;滑动机构下方设有内挑板,所述内挑板底部连接若干压簧;工作箱侧壁低于内挑板位置铺设压电陶瓷;所述工作箱具有多个倾斜面,所述倾斜面
一种隔振减振复合的结构自适应式微耕机扶手架.pdf
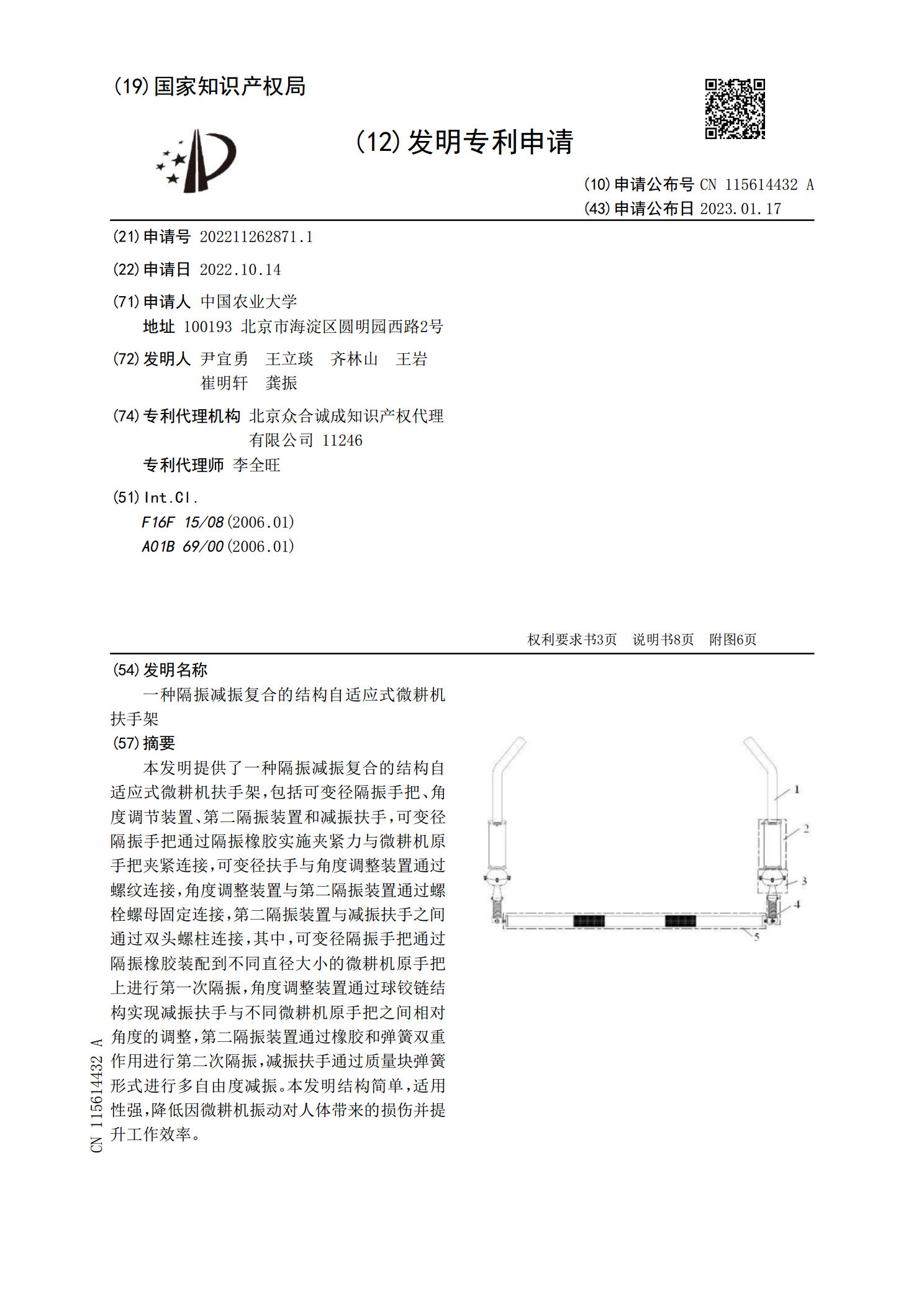
本发明提供了一种隔振减振复合的结构自适应式微耕机扶手架,包括可变径隔振手把、角度调节装置、第二隔振装置和减振扶手,可变径隔振手把通过隔振橡胶实施夹紧力与微耕机原手把夹紧连接,可变径扶手与角度调整装置通过螺纹连接,角度调整装置与第二隔振装置通过螺栓螺母固定连接,第二隔振装置与减振扶手之间通过双头螺柱连接,其中,可变径隔振手把通过隔振橡胶装配到不同直径大小的微耕机原手把上进行第一次隔振,角度调整装置通过球铰链结构实现减振扶手与不同微耕机原手把之间相对角度的调整,第二隔振装置通过橡胶和弹簧双重作用进行第二次隔振
一种自适应减振降噪泡沫夹层板及其制备方法.pdf
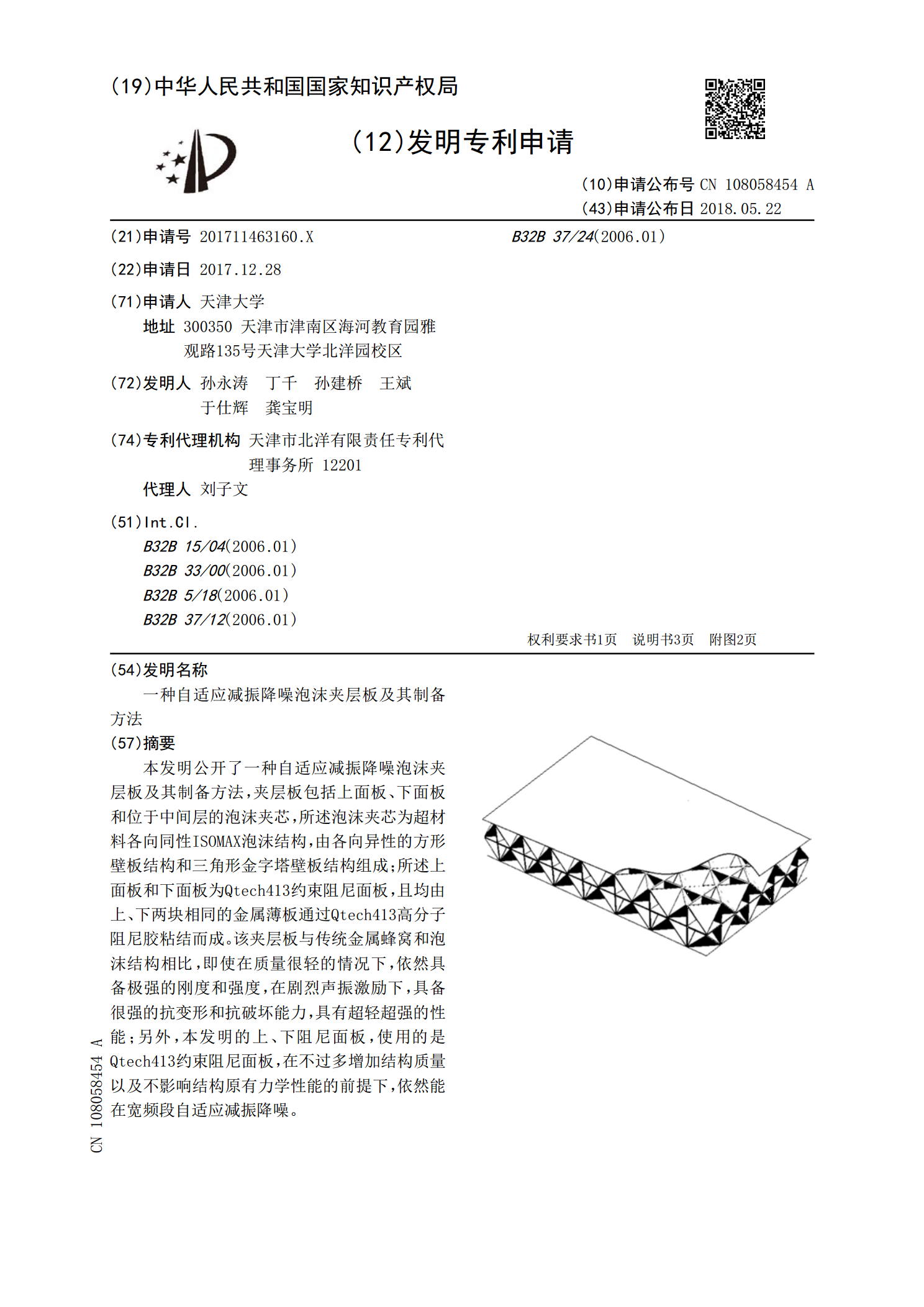
本发明公开了一种自适应减振降噪泡沫夹层板及其制备方法,夹层板包括上面板、下面板和位于中间层的泡沫夹芯,所述泡沫夹芯为超材料各向同性ISOMAX泡沫结构,由各向异性的方形壁板结构和三角形金字塔壁板结构组成;所述上面板和下面板为Qtech413约束阻尼面板,且均由上、下两块相同的金属薄板通过Qtech413高分子阻尼胶粘结而成。该夹层板与传统金属蜂窝和泡沫结构相比,即使在质量很轻的情况下,依然具备极强的刚度和强度,在剧烈声振激励下,具备很强的抗变形和抗破坏能力,具有超轻超强的性能;另外,本发明的上、下阻尼面板
一种自适应刚柔性桥墩防撞减振装置及安装方法.pdf
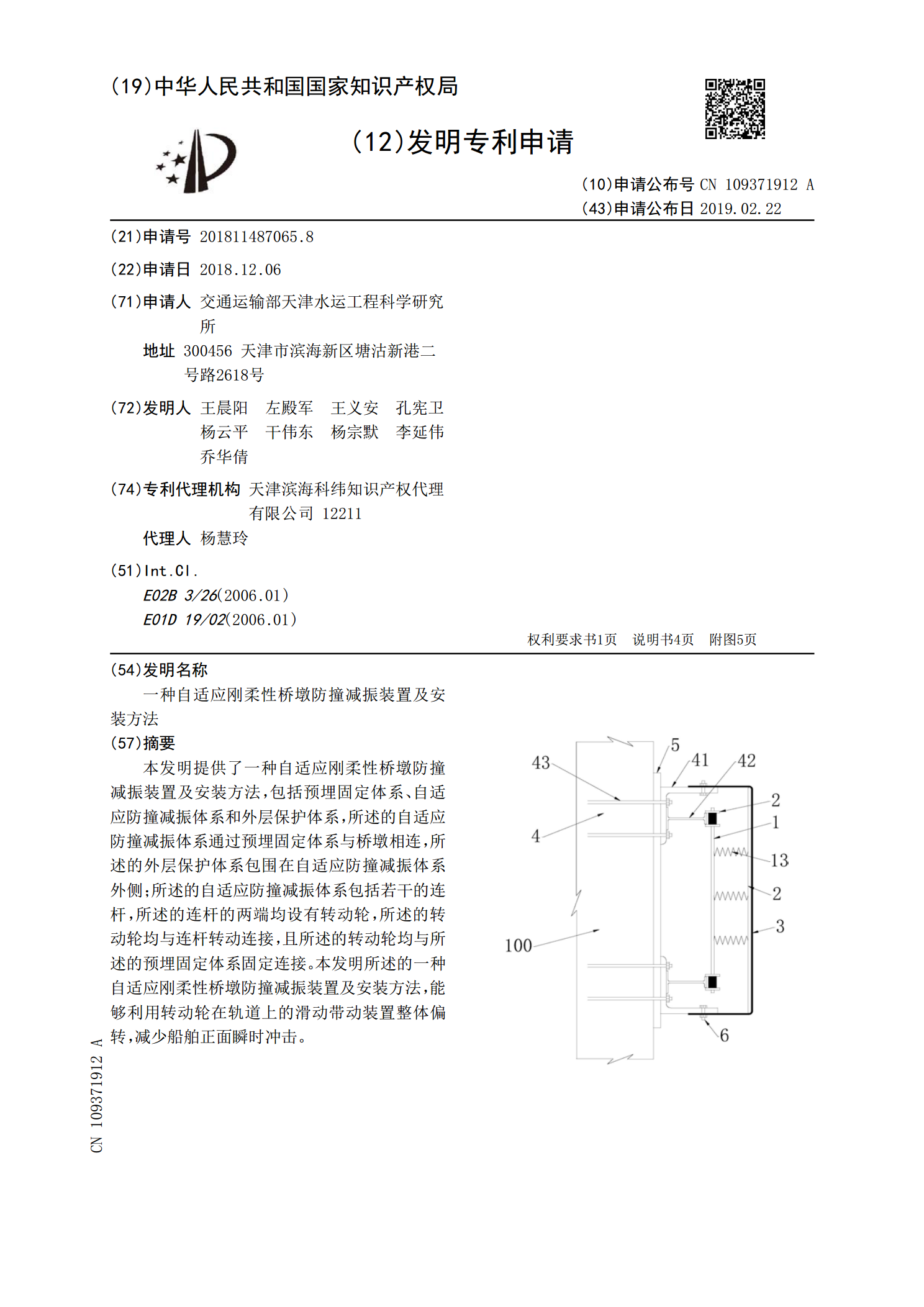
本发明提供了一种自适应刚柔性桥墩防撞减振装置及安装方法,包括预埋固定体系、自适应防撞减振体系和外层保护体系,所述的自适应防撞减振体系通过预埋固定体系与桥墩相连,所述的外层保护体系包围在自适应防撞减振体系外侧;所述的自适应防撞减振体系包括若干的连杆,所述的连杆的两端均设有转动轮,所述的转动轮均与连杆转动连接,且所述的转动轮均与所述的预埋固定体系固定连接。本发明所述的一种自适应刚柔性桥墩防撞减振装置及安装方法,能够利用转动轮在轨道上的滑动带动装置整体偏转,减少船舶正面瞬时冲击。