
一种隔振减振复合的结构自适应式微耕机扶手架.pdf

萌运****魔王


1/10
2/10

3/10

4/10

5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种隔振减振复合的结构自适应式微耕机扶手架.pdf
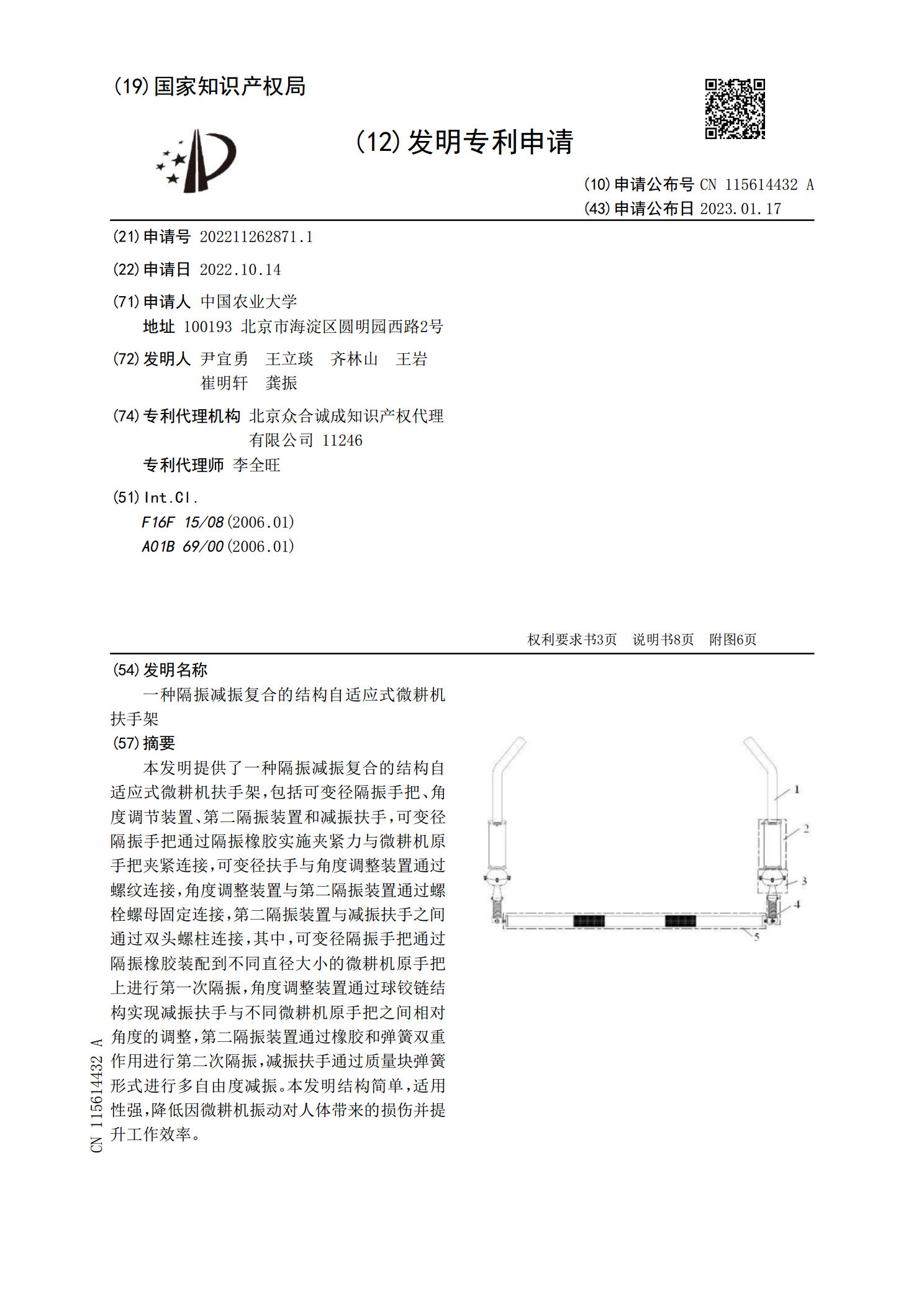
本发明提供了一种隔振减振复合的结构自适应式微耕机扶手架,包括可变径隔振手把、角度调节装置、第二隔振装置和减振扶手,可变径隔振手把通过隔振橡胶实施夹紧力与微耕机原手把夹紧连接,可变径扶手与角度调整装置通过螺纹连接,角度调整装置与第二隔振装置通过螺栓螺母固定连接,第二隔振装置与减振扶手之间通过双头螺柱连接,其中,可变径隔振手把通过隔振橡胶装配到不同直径大小的微耕机原手把上进行第一次隔振,角度调整装置通过球铰链结构实现减振扶手与不同微耕机原手把之间相对角度的调整,第二隔振装置通过橡胶和弹簧双重作用进行第二次隔振
一种用于齿轮箱的复合减隔振结构.pdf
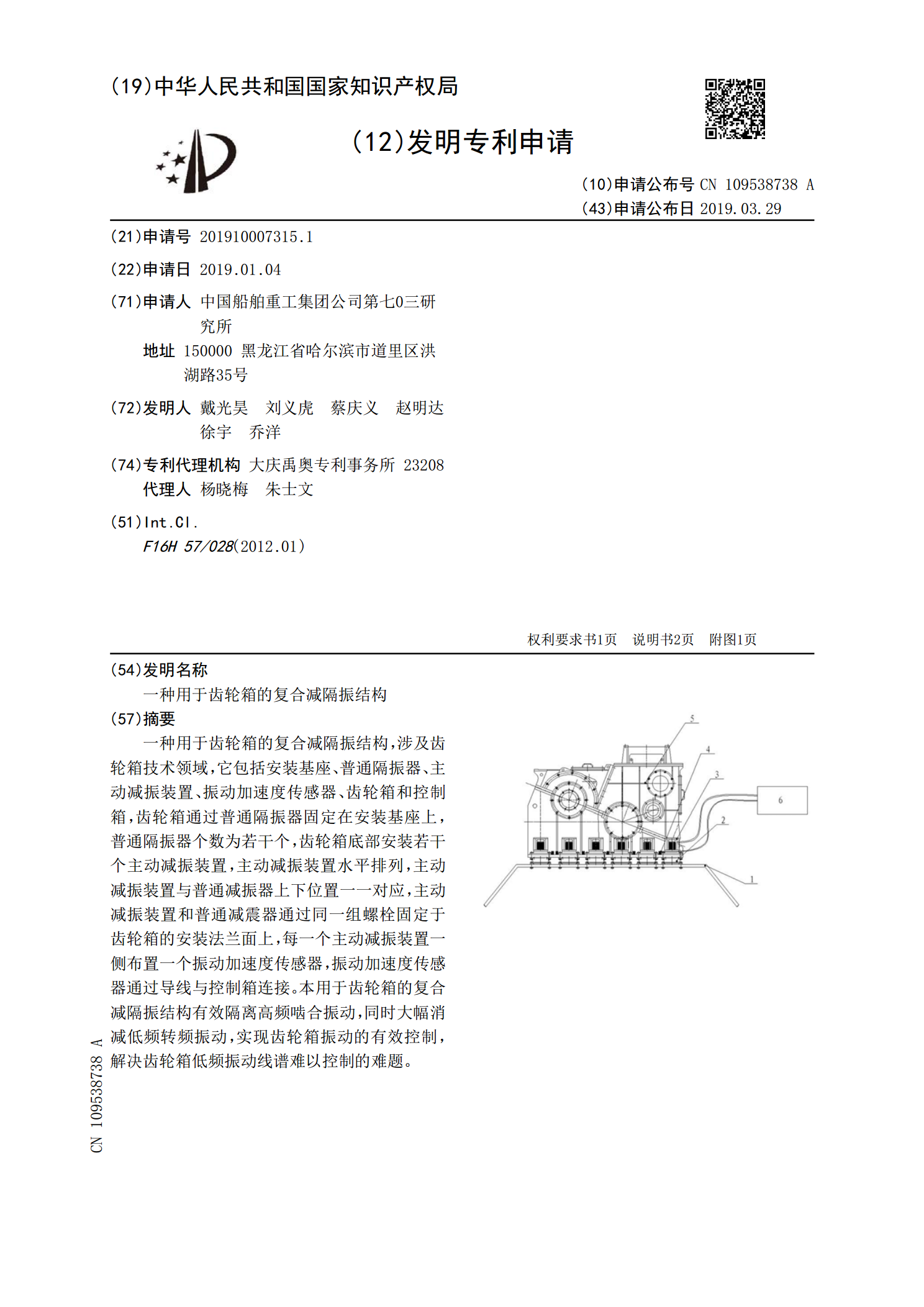
一种用于齿轮箱的复合减隔振结构,涉及齿轮箱技术领域,它包括安装基座、普通隔振器、主动减振装置、振动加速度传感器、齿轮箱和控制箱,齿轮箱通过普通隔振器固定在安装基座上,普通隔振器个数为若干个,齿轮箱底部安装若干个主动减振装置,主动减振装置水平排列,主动减振装置与普通减振器上下位置一一对应,主动减振装置和普通减震器通过同一组螺栓固定于齿轮箱的安装法兰面上,每一个主动减振装置一侧布置一个振动加速度传感器,振动加速度传感器通过导线与控制箱连接。本用于齿轮箱的复合减隔振结构有效隔离高频啮合振动,同时大幅消减低频转频

一种缆索结构的隔减振支架.pdf
本发明公开了一种缆索结构的隔减振支架,包括支撑件(1)、隔振器(3)、液压减振器(6)、弹簧(7)、调控螺母(5)、连接支座(4)。可调组合减振器(B)由弹簧(7)、簧内液压减振器(6)和调控螺母(5)组合而成,弹簧(7)提供支撑力、刚度和复位能力,调控螺母(5)调控弹簧(7)的长度可保证平衡位置处支撑件根部(A)无拉应力,液压减震器(6)起面内缓冲、控制位移、耗能减振的作用。隔振器(3)产生剪切变形并耗能可降低支撑件(1)间作用引起的面外纵向振动。该缆索结构的隔减振支架解决了面内和面外三向振动导致的撑件
减振组件、隔振器及压缩机机组.pdf
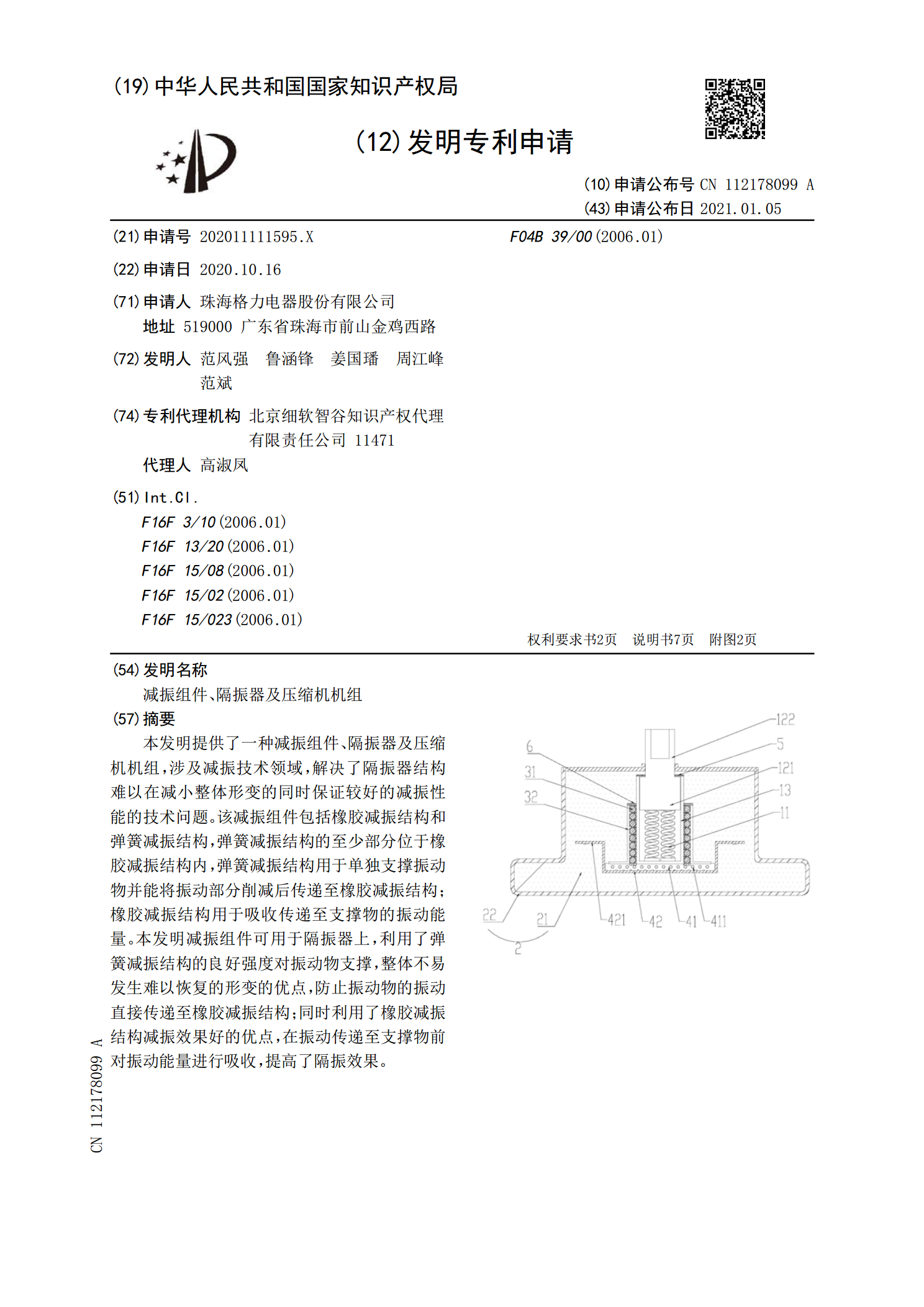
本发明提供了一种减振组件、隔振器及压缩机机组,涉及减振技术领域,解决了隔振器结构难以在减小整体形变的同时保证较好的减振性能的技术问题。该减振组件包括橡胶减振结构和弹簧减振结构,弹簧减振结构的至少部分位于橡胶减振结构内,弹簧减振结构用于单独支撑振动物并能将振动部分削减后传递至橡胶减振结构;橡胶减振结构用于吸收传递至支撑物的振动能量。本发明减振组件可用于隔振器上,利用了弹簧减振结构的良好强度对振动物支撑,整体不易发生难以恢复的形变的优点,防止振动物的振动直接传递至橡胶减振结构;同时利用了橡胶减振结构减振效果好
一种隔振支撑结构及隔振器.pdf
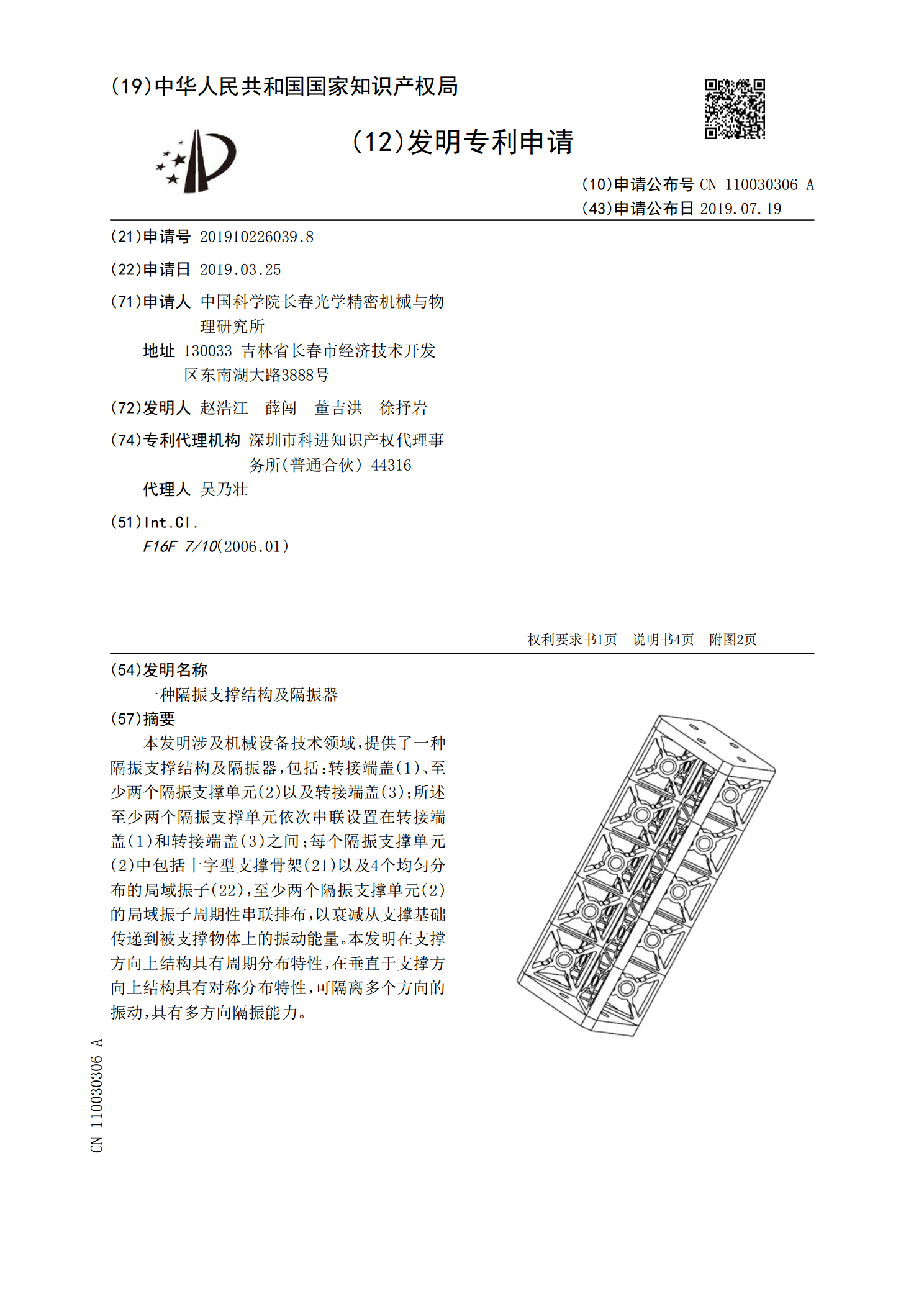
本发明涉及机械设备技术领域,提供了一种隔振支撑结构及隔振器,包括:转接端盖(1)、至少两个隔振支撑单元(2)以及转接端盖(3);所述至少两个隔振支撑单元依次串联设置在转接端盖(1)和转接端盖(3)之间;每个隔振支撑单元(2)中包括十字型支撑骨架(21)以及4个均匀分布的局域振子(22),至少两个隔振支撑单元(2)的局域振子周期性串联排布,以衰减从支撑基础传递到被支撑物体上的振动能量。本发明在支撑方向上结构具有周期分布特性,在垂直于支撑方向上结构具有对称分布特性,可隔离多个方向的振动,具有多方向隔振能力。