
工业六轴机器人末端抖动的研究.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

工业六轴机器人末端抖动的研究.docx
工业六轴机器人末端抖动的研究本文旨在探讨工业六轴机器人末端抖动问题,并提出解决措施。首先,分析工业六轴机器人的结构,了解其原理和构成要素。然后,针对机器人的运动过程中出现的抖动问题,分析其成因和影响,并提出相应的解决措施,以提高机器人的作业质量和效率。一、工业六轴机器人结构及原理工业六轴机器人是一种具有六个自由度的机器人,它由机械结构、控制系统、传感器三个部分组成。1.机械结构机械结构是工业六轴机器人的物理载体,它包括底座、臂、手和末端执行器等部分。其中,底座是机器人的基础部分,它通过支撑机器人的臂和手来
一种工业机器人末端抖动程度测量装置及其测量方法.pdf
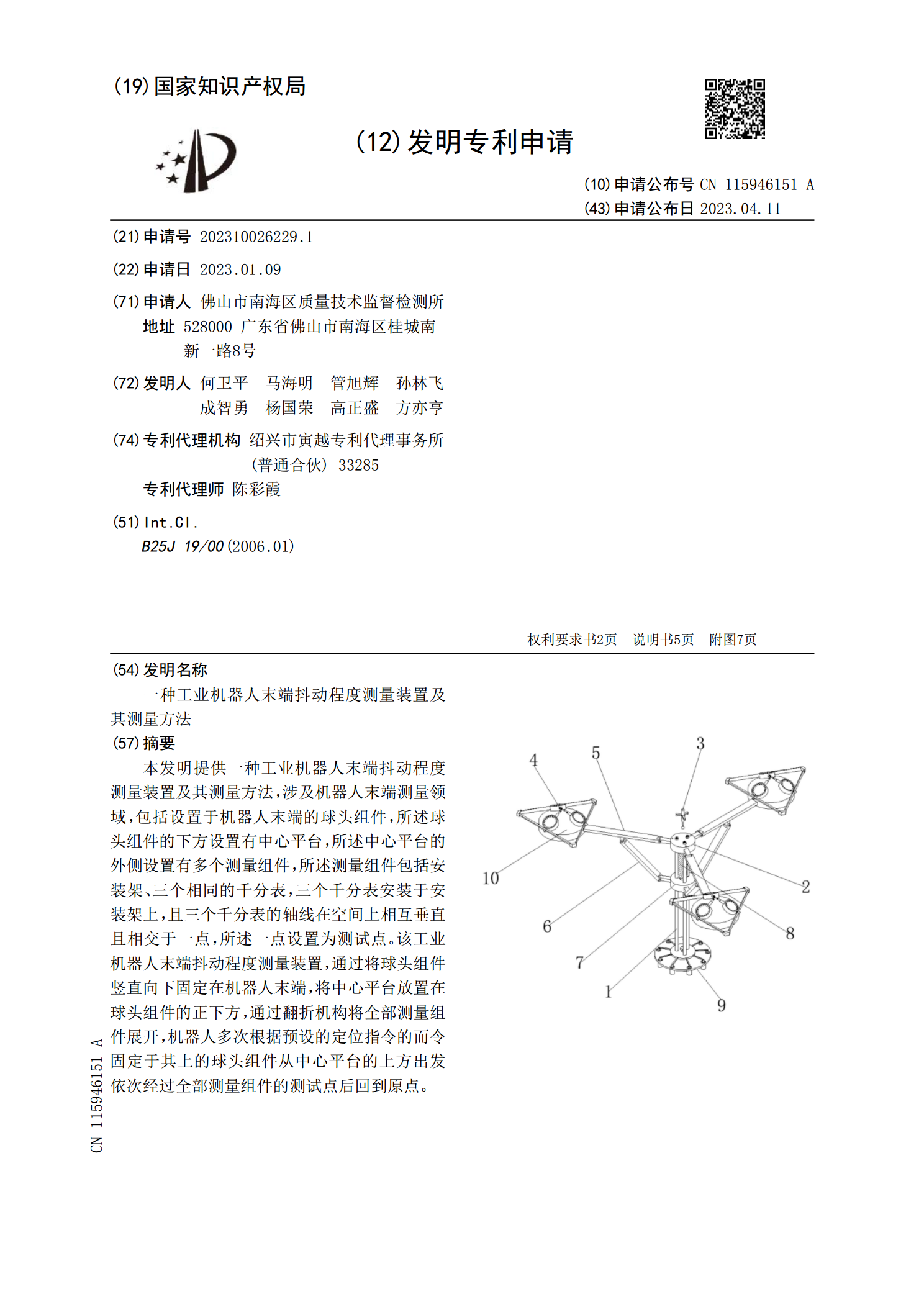
本发明提供一种工业机器人末端抖动程度测量装置及其测量方法,涉及机器人末端测量领域,包括设置于机器人末端的球头组件,所述球头组件的下方设置有中心平台,所述中心平台的外侧设置有多个测量组件,所述测量组件包括安装架、三个相同的千分表,三个千分表安装于安装架上,且三个千分表的轴线在空间上相互垂直且相交于一点,所述一点设置为测试点。该工业机器人末端抖动程度测量装置,通过将球头组件竖直向下固定在机器人末端,将中心平台放置在球头组件的正下方,通过翻折机构将全部测量组件展开,机器人多次根据预设的定位指令的而令固定于其上的

工业机器人末端智能浇注臂结构研究.docx
工业机器人末端智能浇注臂结构研究工业机器人末端智能浇注臂结构研究摘要:随着工业自动化程度的不断提高,工业机器人在生产线中的应用越来越广泛。末端执行机构作为机器人身体的最后一环,承担着重要的任务。本论文针对工业机器人末端智能浇注臂结构进行研究,旨在解决当前浇注过程中存在的一些问题,提高工业机器人的效率和精度。引言:工业机器人在浇注过程中一方面需要保证浇注物料的准确性,另一方面要保证工作环境的安全性。而末端智能浇注臂作为工业机器人的重要组成部分,直接影响到浇注过程的效率和准确性。因此,对末端智能浇注臂结构进行

工业机器人末端智能浇注臂结构研究.pptx
添加副标题目录PART01PART02浇注臂结构类型浇注臂材料选择浇注臂结构设计要点浇注臂结构优化方案PART03控制系统硬件组成控制系统软件设计控制系统通信协议控制系统安全保护机制PART04浇注臂运动学模型建立浇注臂动力学模型建立浇注臂运动学及动力学仿真分析浇注臂运动学及动力学优化设计PART05实验设备及实验条件浇注臂实验过程及结果分析浇注臂性能评估标准及方法浇注臂性能优化方案及改进措施PART06工业机器人末端智能浇注臂市场需求分析工业机器人末端智能浇注臂技术发展趋势分析工业机器人末端智能浇注臂应

ABB六轴工业机器人奇点矫正问题研究.docx
ABB六轴工业机器人奇点矫正问题研究摘要ABB六轴工业机器人是现代工厂中常用的自动化生产设备。在实际使用过程中,机器人由于各种原因可能会发生奇点问题,导致机器人的姿态控制出现异常,影响生产效率和质量。本文主要研究ABB六轴机器人的奇点问题,介绍奇点的形成原因和常见的矫正方法,希望对工业机器人的运用提供一定的参考和帮助。关键词:ABB六轴工业机器人;奇点问题;矫正方法1.引言随着科技的发展,工业机器人已经成为现代工厂自动化制造的主要设备之一。ABB六轴工业机器人具有灵活的空间运动能力、高速度和高精度的运动控