
塑料管材生产线自动切割装置.pdf

是你****辉呀

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
塑料管材生产线自动切割装置.pdf
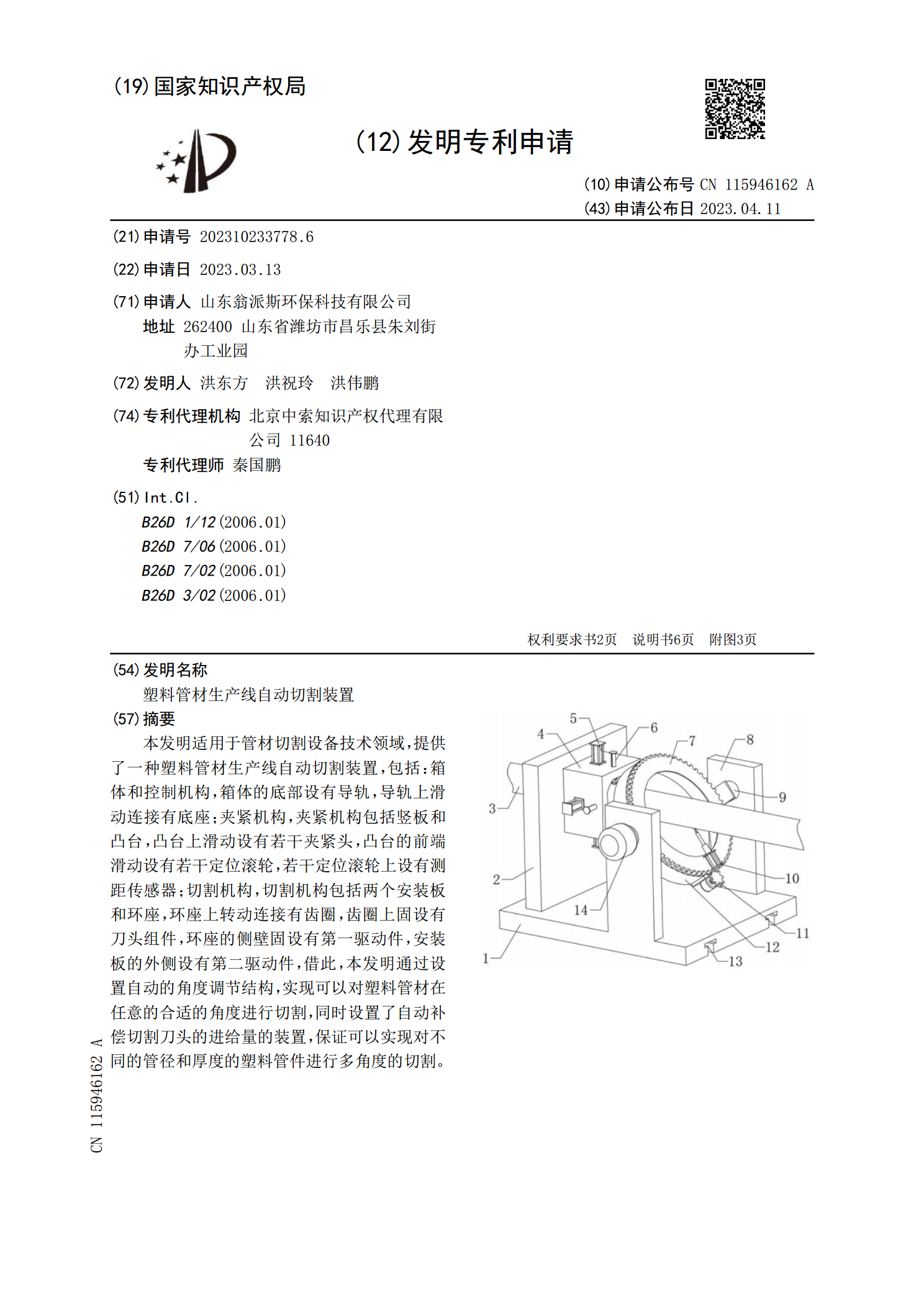
本发明适用于管材切割设备技术领域,提供了一种塑料管材生产线自动切割装置,包括:箱体和控制机构,箱体的底部设有导轨,导轨上滑动连接有底座;夹紧机构,夹紧机构包括竖板和凸台,凸台上滑动设有若干夹紧头,凸台的前端滑动设有若干定位滚轮,若干定位滚轮上设有测距传感器;切割机构,切割机构包括两个安装板和环座,环座上转动连接有齿圈,齿圈上固设有刀头组件,环座的侧壁固设有第一驱动件,安装板的外侧设有第二驱动件,借此,本发明通过设置自动的角度调节结构,实现可以对塑料管材在任意的合适的角度进行切割,同时设置了自动补偿切割刀头
全自动管材切割生产线装置.pdf
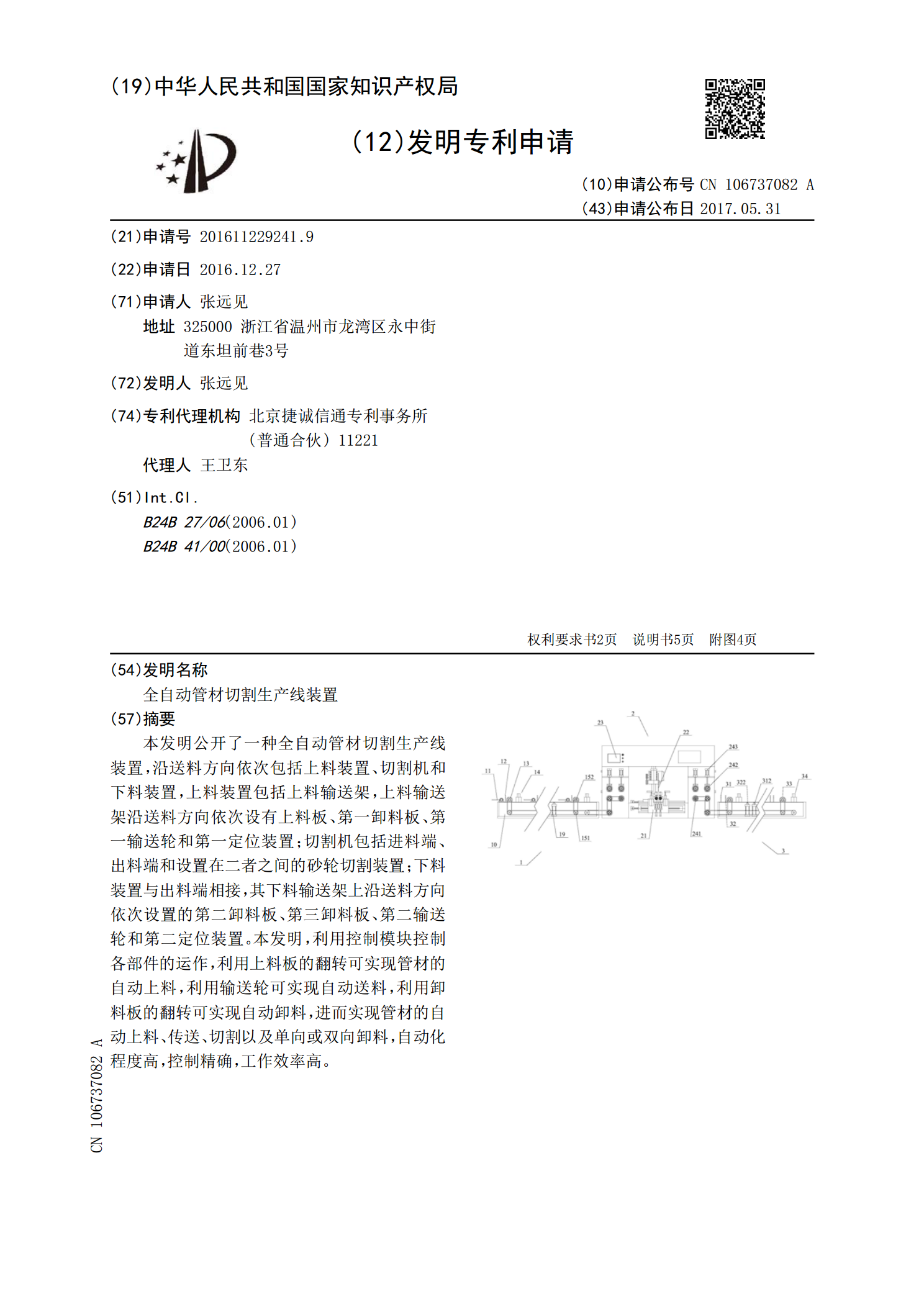
本发明公开了一种全自动管材切割生产线装置,沿送料方向依次包括上料装置、切割机和下料装置,上料装置包括上料输送架,上料输送架沿送料方向依次设有上料板、第一卸料板、第一输送轮和第一定位装置;切割机包括进料端、出料端和设置在二者之间的砂轮切割装置;下料装置与出料端相接,其下料输送架上沿送料方向依次设置的第二卸料板、第三卸料板、第二输送轮和第二定位装置。本发明,利用控制模块控制各部件的运作,利用上料板的翻转可实现管材的自动上料,利用输送轮可实现自动送料,利用卸料板的翻转可实现自动卸料,进而实现管材的自动上料、传送
一种塑料管材自动切割装置.pdf
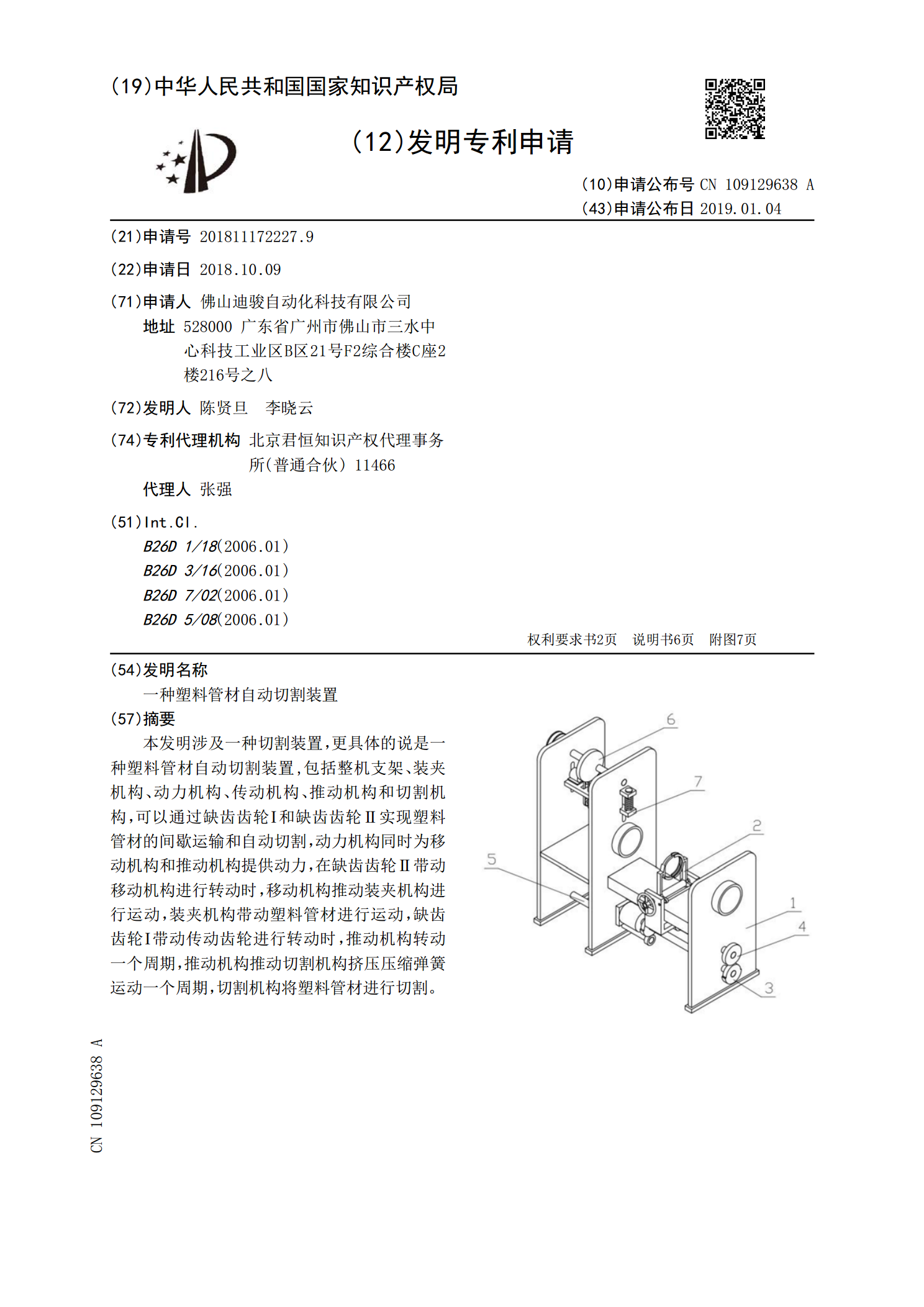
本发明涉及一种切割装置,更具体的说是一种塑料管材自动切割装置,包括整机支架、装夹机构、动力机构、传动机构、推动机构和切割机构,可以通过缺齿齿轮Ⅰ和缺齿齿轮Ⅱ实现塑料管材的间歇运输和自动切割,动力机构同时为移动机构和推动机构提供动力,在缺齿齿轮Ⅱ带动移动机构进行转动时,移动机构推动装夹机构进行运动,装夹机构带动塑料管材进行运动,缺齿齿轮Ⅰ带动传动齿轮进行转动时,推动机构转动一个周期,推动机构推动切割机构挤压压缩弹簧运动一个周期,切割机构将塑料管材进行切割。

管材自动切割倒角装置.pdf
一种管材自动切割倒角装置,矫直机构、手轮滑移机构、手轮和切割机构依次安装在机架上,推送机构位于切割机构一端,并且推送机构中的夹紧器上的管材夹紧槽的中心线与置于切割机构中的管材的中心重合;倒角机构位于切割机构一侧,与切割机构之间相互平行,并与推送机构之间相互垂直。当管材经切割机构切割后,通过夹紧器将管材夹紧固定,通过推送机构将夹紧器和管材一起推送至倒角工位进行倒角。本发明集管材的矫直、切割和倒角为一体,使管材切割后能够直接倒角,提高了管材加工的自动化程度和加工效率,并且倒角均匀。所提出的切割倒角装置结构简单

PVC管材生产线中的管材切割装置.pdf
本发明公开了PVC管材生产线中的管材切割装置,包括:机架,在机架上设有由电机驱动的圆环形惯性轮,圆环形惯性轮的侧面上间隔设有均沿径向设置的滑块轨道与刀片支架轨道;滑块轨道上设置带有第一凸台的滑块,刀片支架轨道上设置带有第二凸台的刀片支架,刀片支架上装有切割刀片,滑块的重量大于安装有切割刀片的刀片支架的重量;圆环形惯性轮的侧面铰接有弧形传动臂,连接轴两侧的弧形传动臂上分别开设有一个条形通孔,两个条形通孔分别套装在滑块上的第一凸台与刀片支架上的第二凸台上,在滑块所对应的圆环形惯性轮的外圆周面上还设置有可以防止