
搬运夹具及具有其的码垛机.pdf

书生****66

1/9
2/9

3/9

4/9
5/9
6/9
7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
搬运夹具及具有其的码垛机.pdf
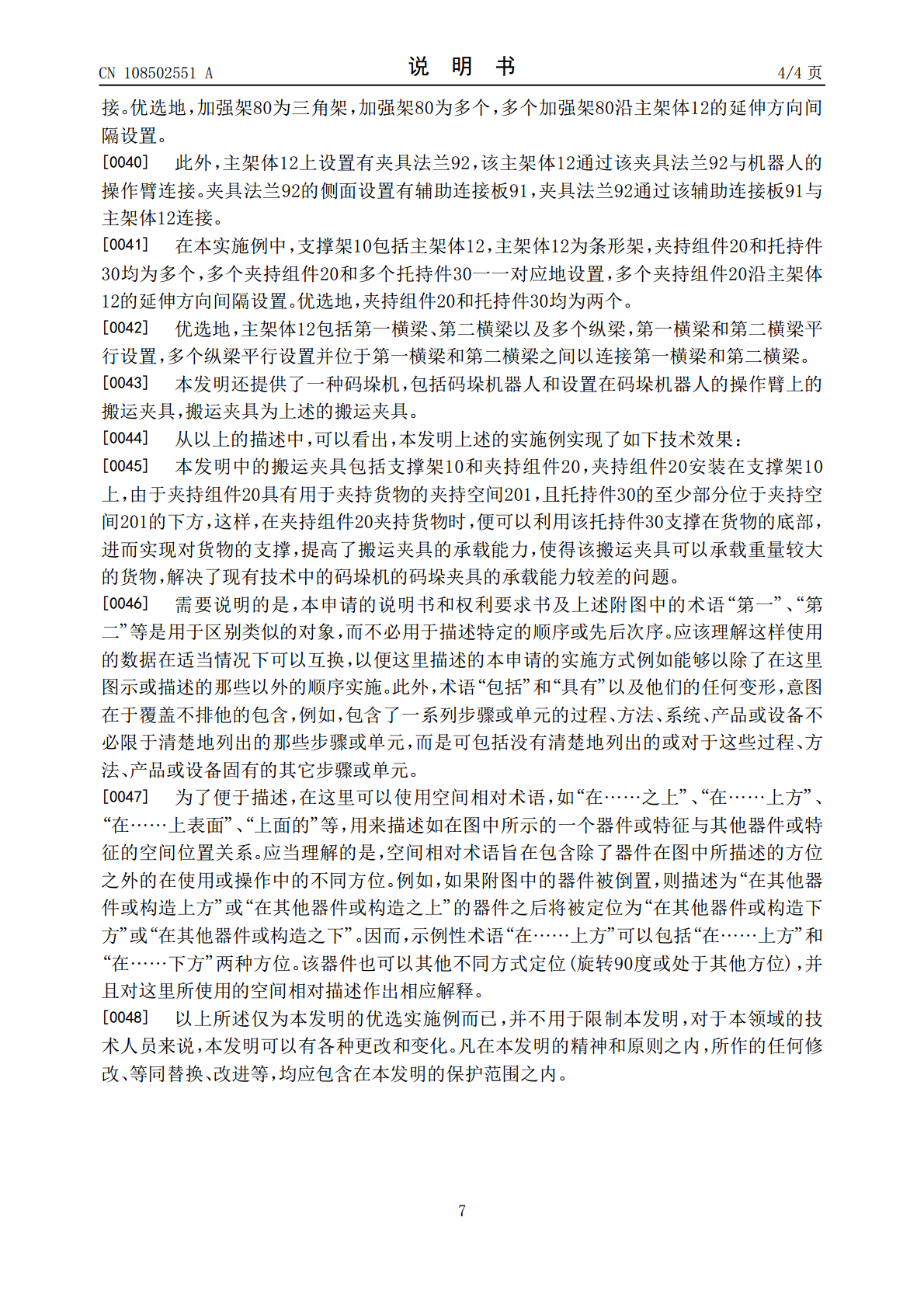
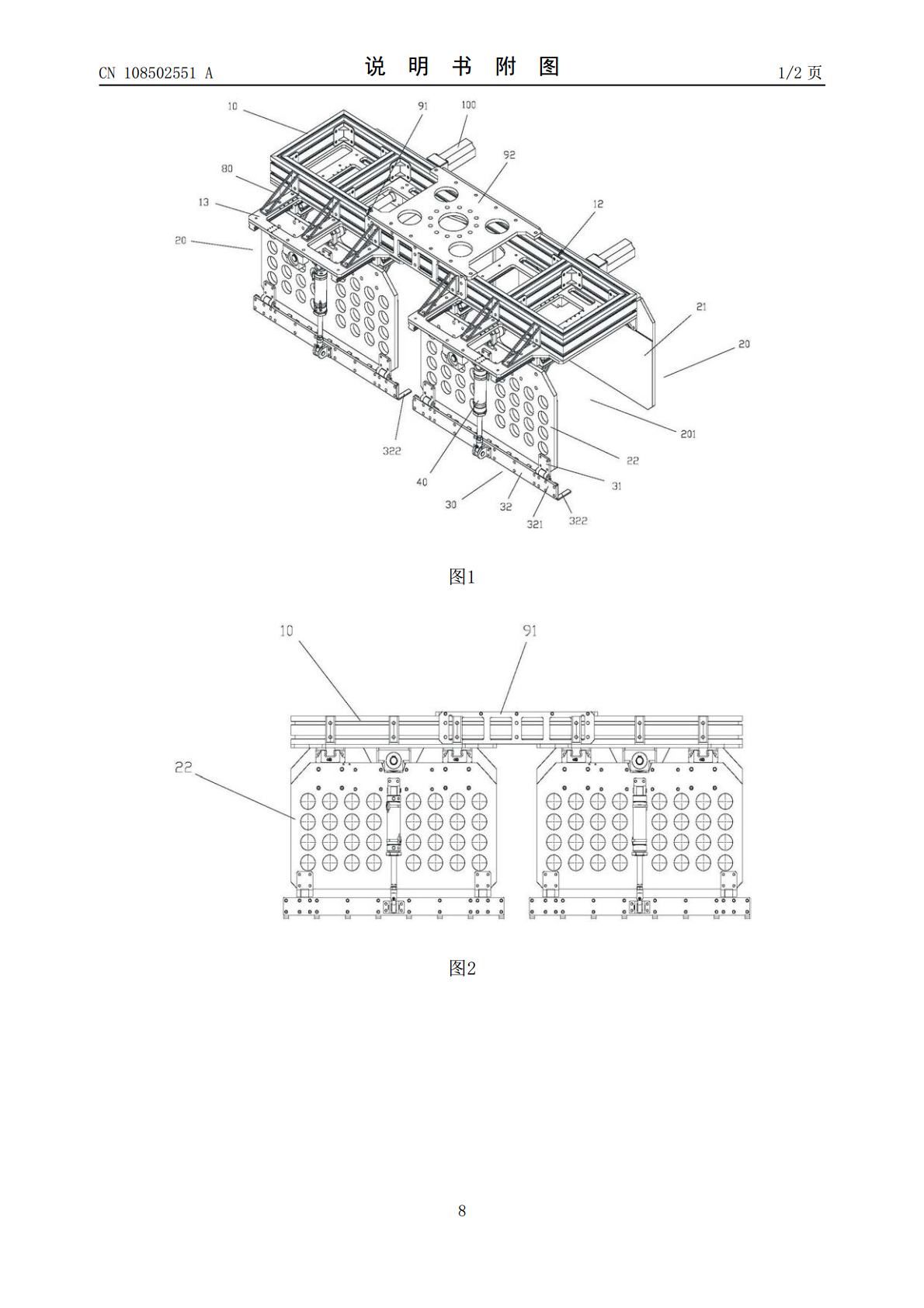
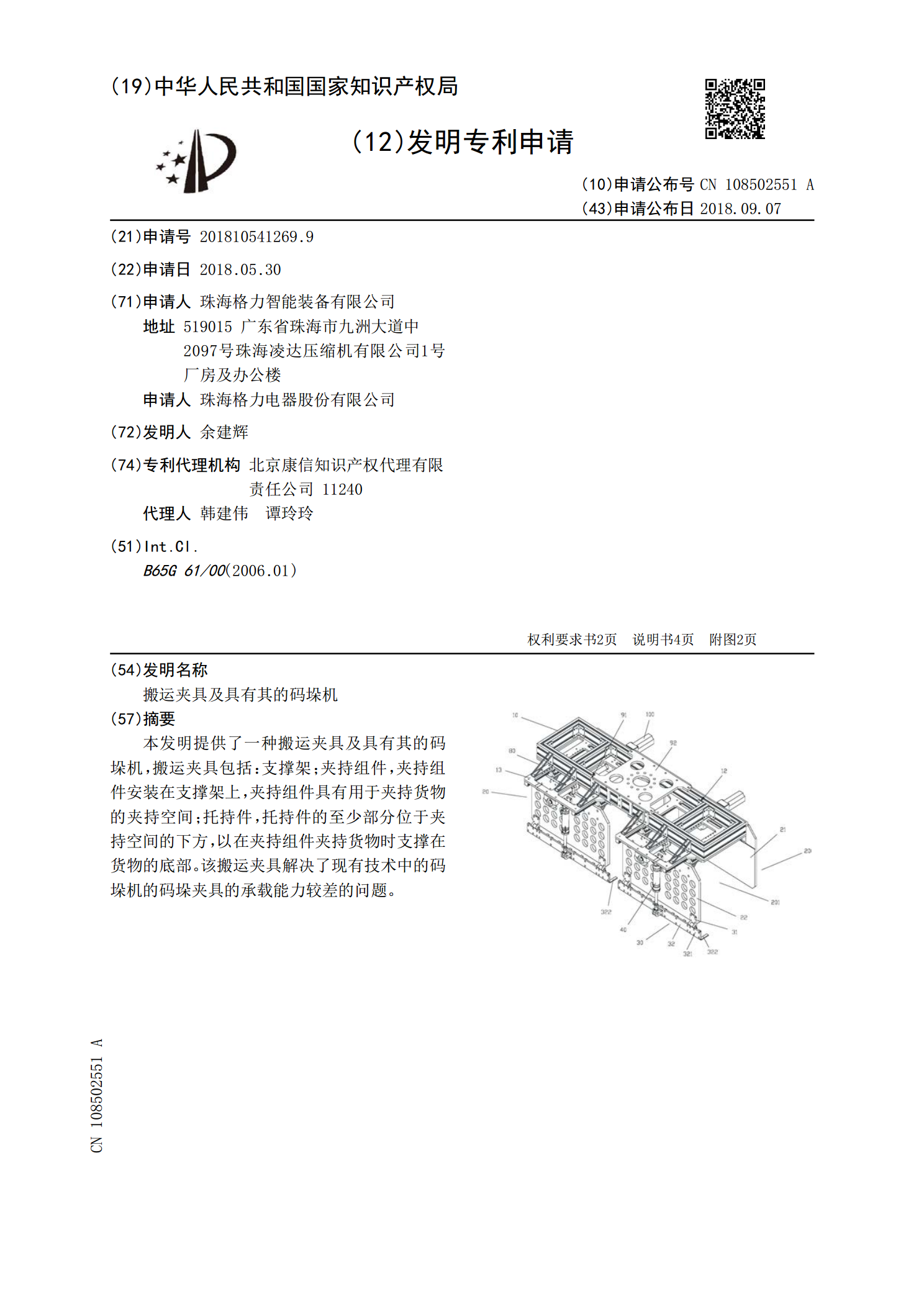
本发明提供了一种搬运夹具及具有其的码垛机,搬运夹具包括:支撑架;夹持组件,夹持组件安装在支撑架上,夹持组件具有用于夹持货物的夹持空间;托持件,托持件的至少部分位于夹持空间的下方,以在夹持组件夹持货物时支撑在货物的底部。该搬运夹具解决了现有技术中的码垛机的码垛夹具的承载能力较差的问题。

双层夹具及码垛机.pdf
本实用新型提供一种双层夹具及码垛机。双层夹具包括:安装吊架;第一夹取模组包括第一驱动部件和多个第一夹取组件,第一夹取组件包括第一安装架和两个第一夹持部件,第一夹持部件设置在第一安装架上,第一驱动部件用于驱动相对布置两个第一夹持部件相对活动;第二夹取模组包括第二驱动部件和第二夹取组件,第二夹取组件包括第二安装架和两个第二夹持部件,第二夹持部件设置在第二安装架上,第二驱动部件用于驱动相对布置两个第二夹持部件相对活动;其中,第二安装架设置在安装吊架上,多个第一安装架并排布置,至少一第一安装架可相对于安装吊架沿第
搬运装置及具有其的搬运设备.pdf
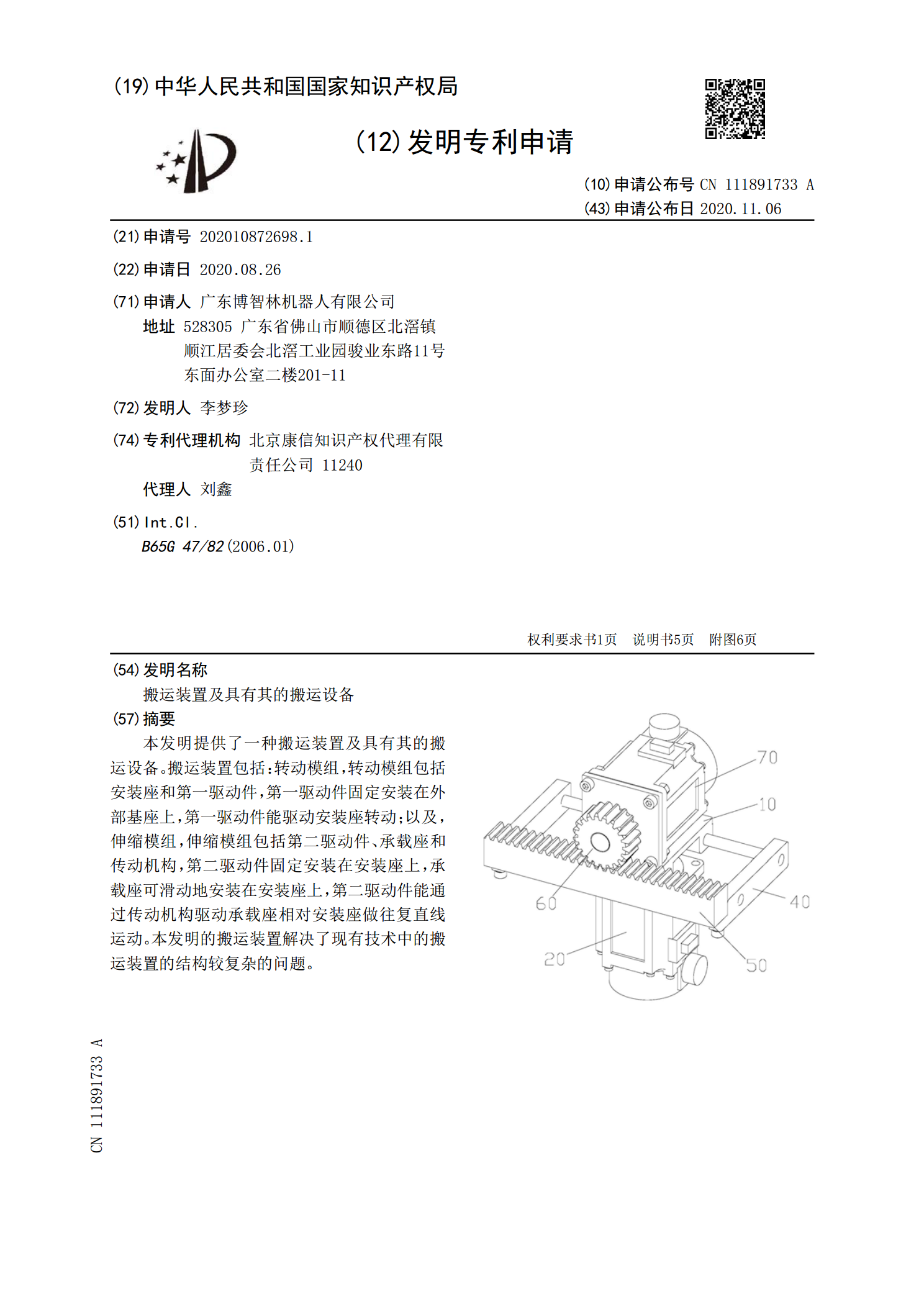
本发明提供了一种搬运装置及具有其的搬运设备。搬运装置包括:转动模组,转动模组包括安装座和第一驱动件,第一驱动件固定安装在外部基座上,第一驱动件能驱动安装座转动;以及,伸缩模组,伸缩模组包括第二驱动件、承载座和传动机构,第二驱动件固定安装在安装座上,承载座可滑动地安装在安装座上,第二驱动件能通过传动机构驱动承载座相对安装座做往复直线运动。本发明的搬运装置解决了现有技术中的搬运装置的结构较复杂的问题。

方钢搬运码垛机的设计与研究.docx
方钢搬运码垛机的设计与研究随着现代化制造业的快速发展,自动化生产设备在工业生产中的作用越来越重要。码垛机作为自动化生产设备的重要组成部分,越来越受到工业生产企业的青睐。方钢搬运码垛机是一种新型的自动化生产设备,具有良好的使用效果和广泛的使用范围。本文将详细介绍方钢搬运码垛机的设计与研究。一、方钢搬运码垛机的原理方钢搬运码垛机采用先进的自动控制技术和机械传动技术,通过对货物的识别和定位,实现对货物的自动化搬运和码垛。方钢搬运码垛机主要由输送装置、搬运装置、码垛装置和控制系统等组成。输送装置和搬运装置主要负责
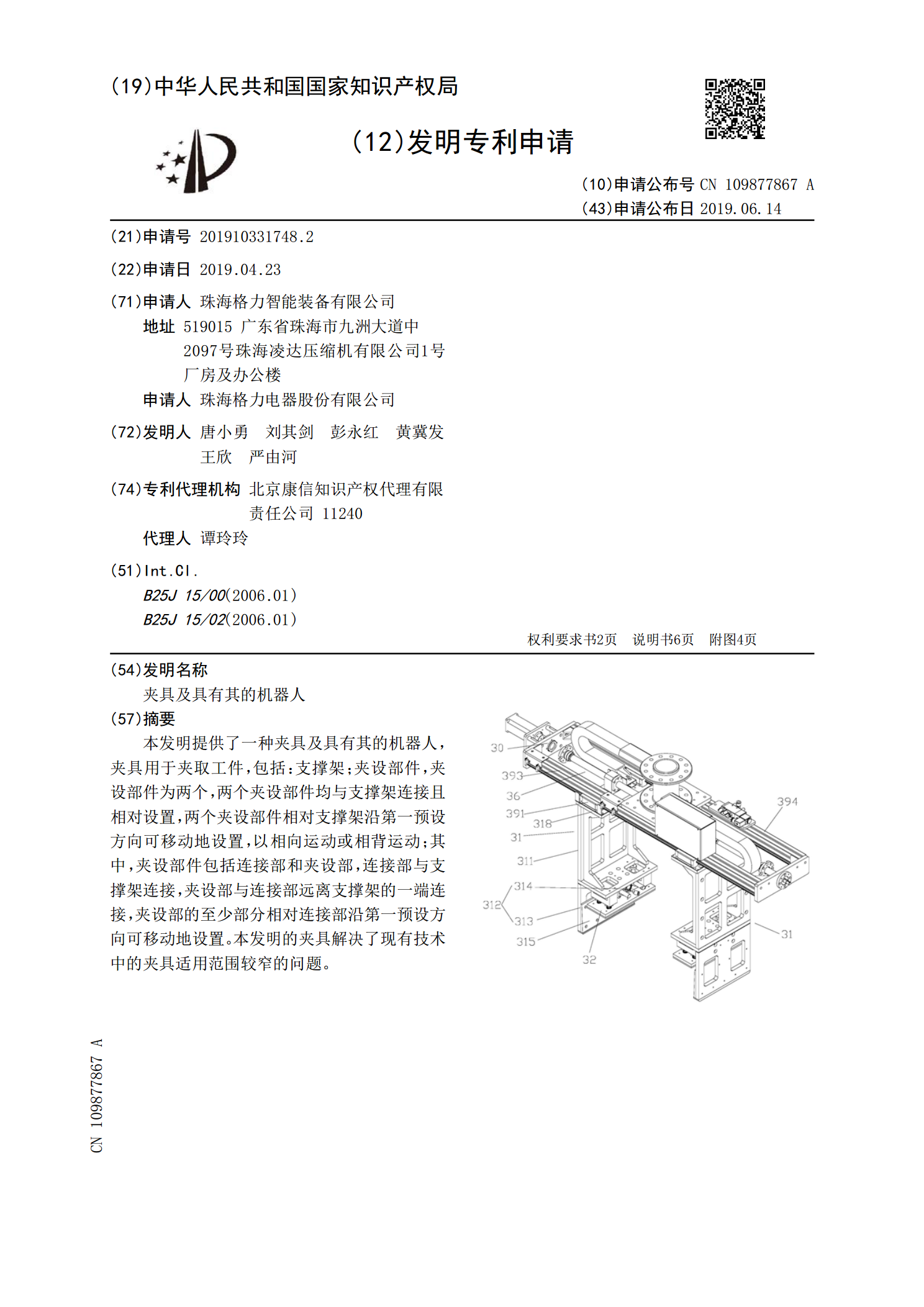
夹具及具有其的机器人.pdf
本发明提供了一种夹具及具有其的机器人,夹具用于夹取工件,包括:支撑架;夹设部件,夹设部件为两个,两个夹设部件均与支撑架连接且相对设置,两个夹设部件相对支撑架沿第一预设方向可移动地设置,以相向运动或相背运动;其中,夹设部件包括连接部和夹设部,连接部与支撑架连接,夹设部与连接部远离支撑架的一端连接,夹设部的至少部分相对连接部沿第一预设方向可移动地设置。本发明的夹具解决了现有技术中的夹具适用范围较窄的问题。