
一种基于ROS的服务机器人及其多目标自主巡航方法.pdf

冬易****娘子


1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于ROS的服务机器人及其多目标自主巡航方法.pdf
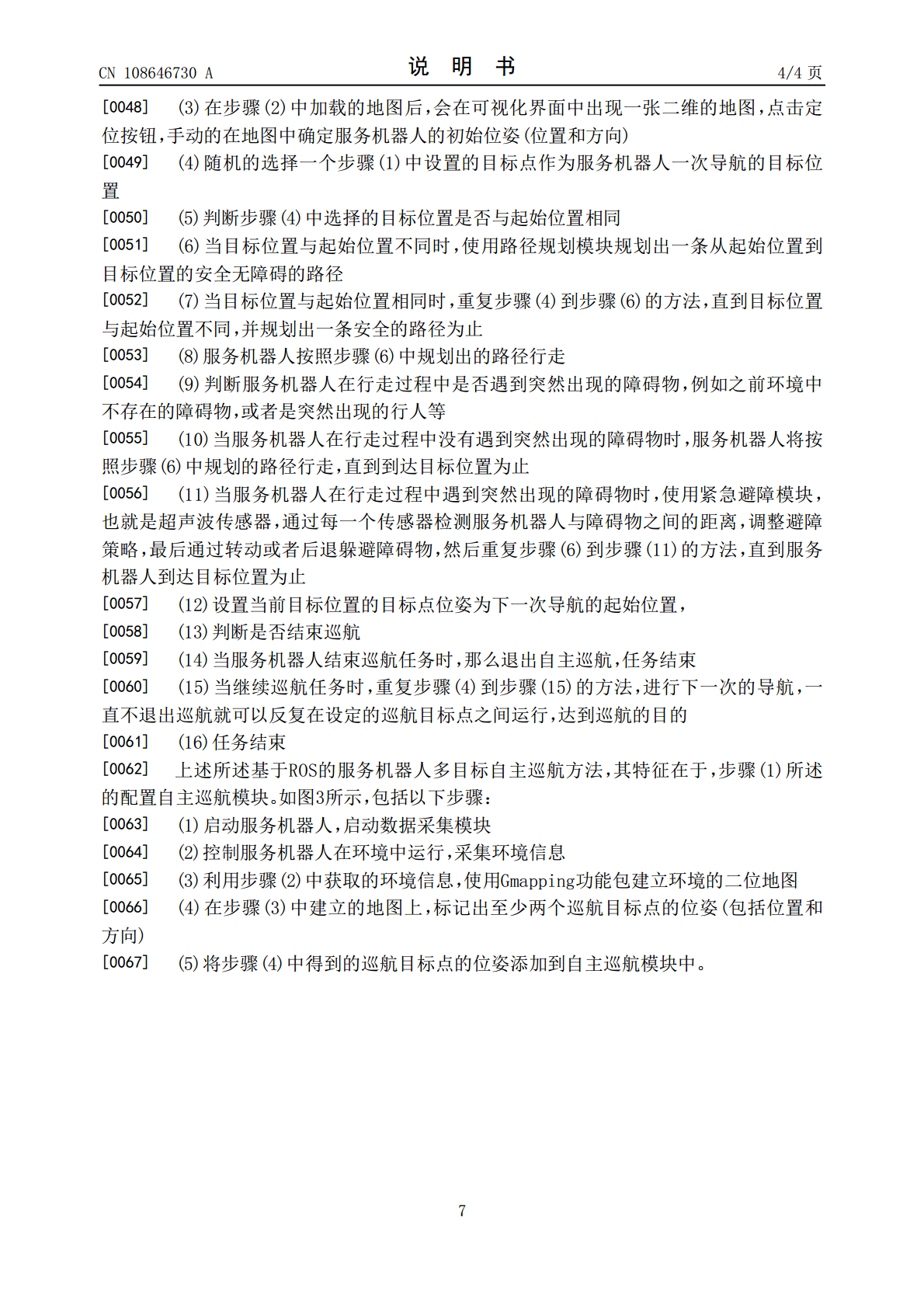
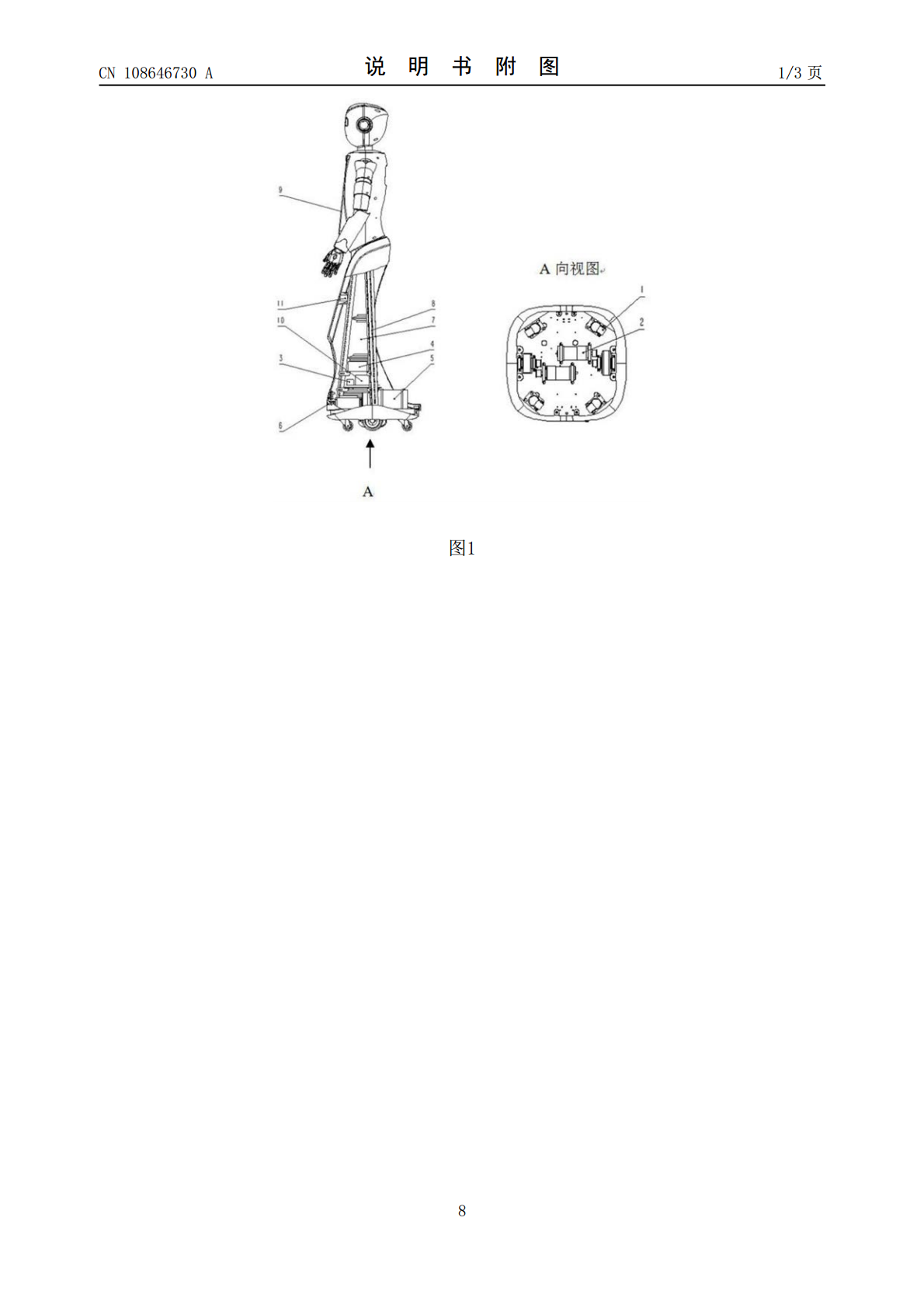
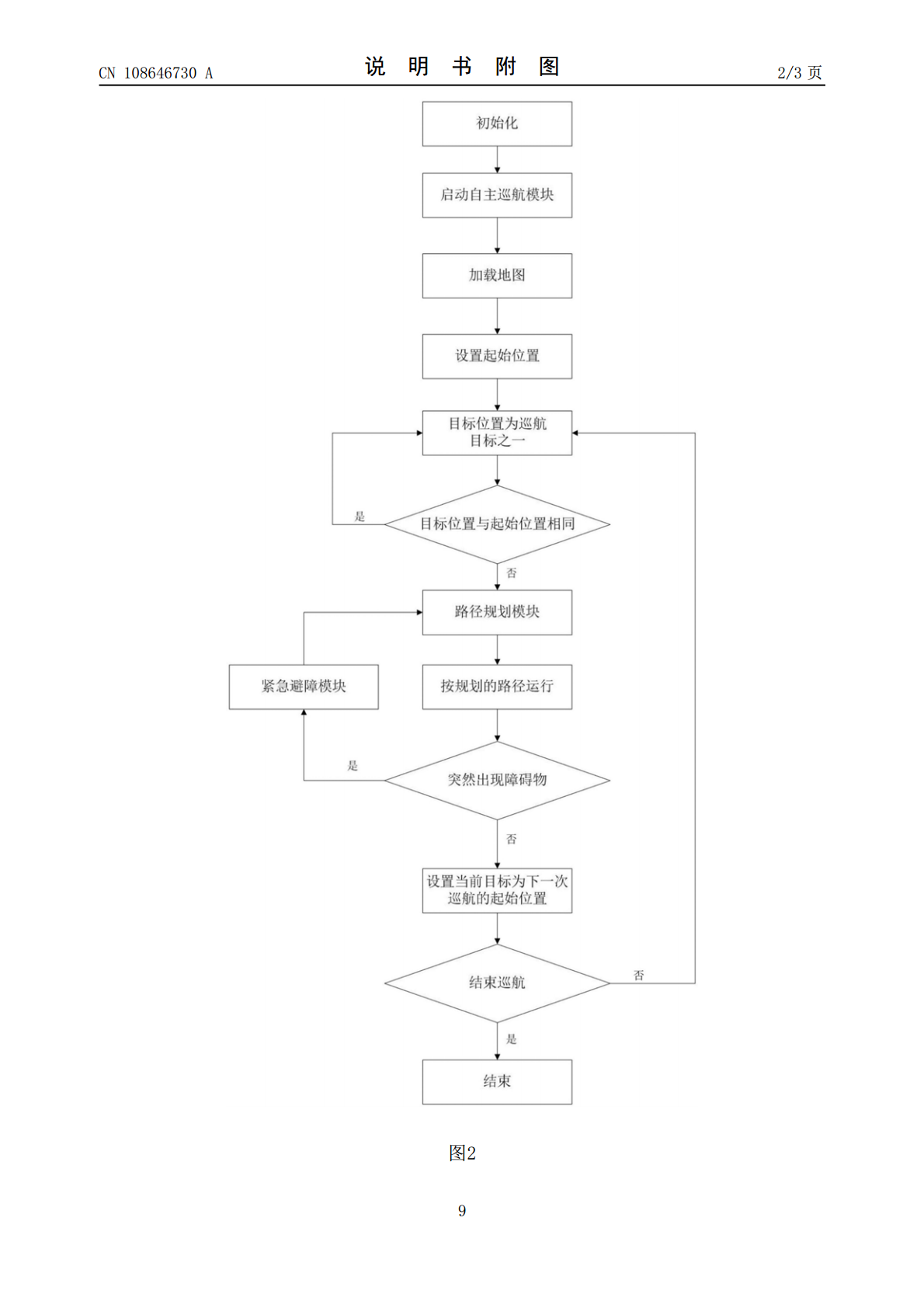
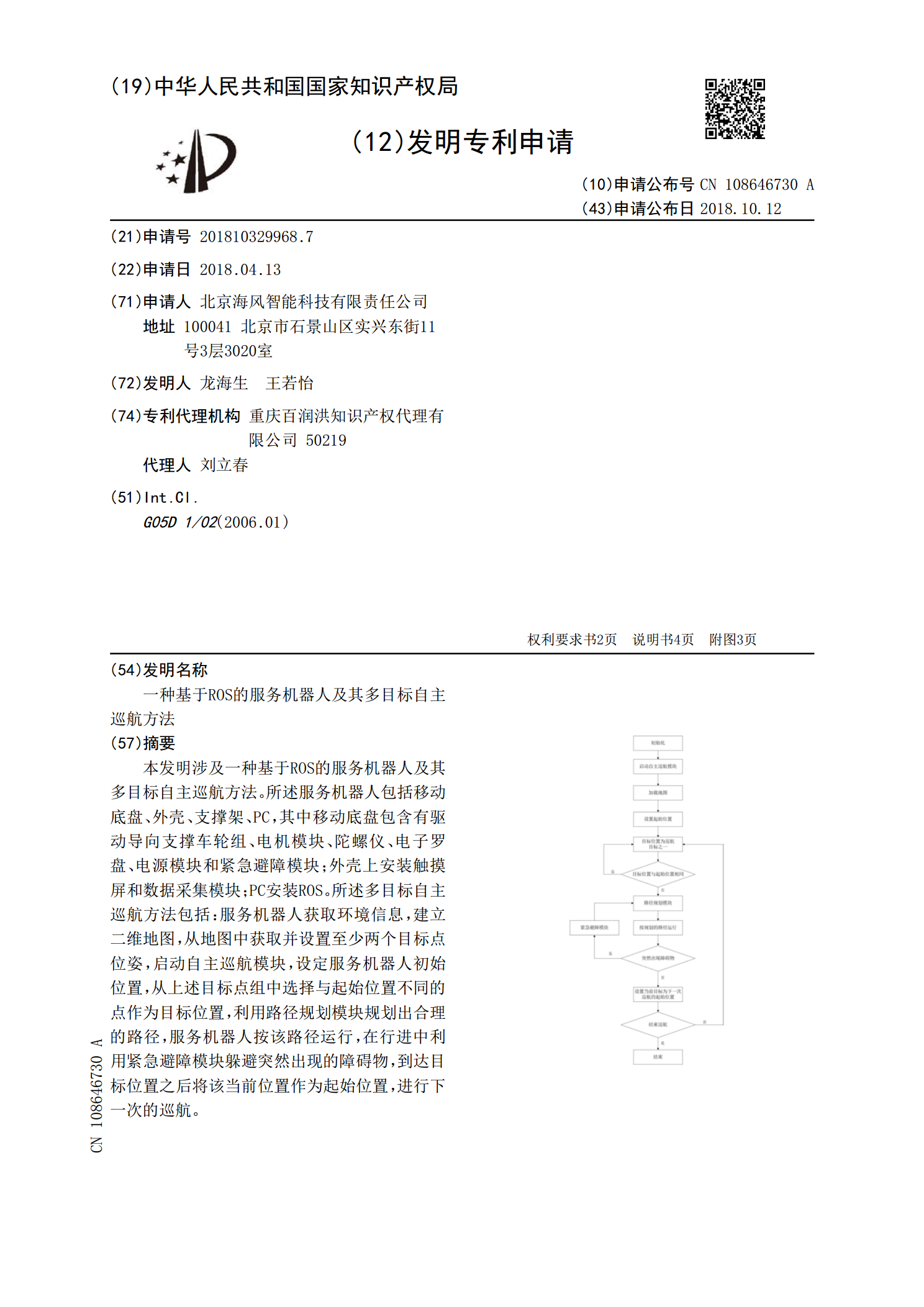
本发明涉及一种基于ROS的服务机器人及其多目标自主巡航方法。所述服务机器人包括移动底盘、外壳、支撑架、PC,其中移动底盘包含有驱动导向支撑车轮组、电机模块、陀螺仪、电子罗盘、电源模块和紧急避障模块;外壳上安装触摸屏和数据采集模块;PC安装ROS。所述多目标自主巡航方法包括:服务机器人获取环境信息,建立二维地图,从地图中获取并设置至少两个目标点位姿,启动自主巡航模块,设定服务机器人初始位置,从上述目标点组中选择与起始位置不同的点作为目标位置,利用路径规划模块规划出合理的路径,服务机器人按该路径运行,在行进中
一种基于ROS的服务机器人及其室内导航方法.pdf
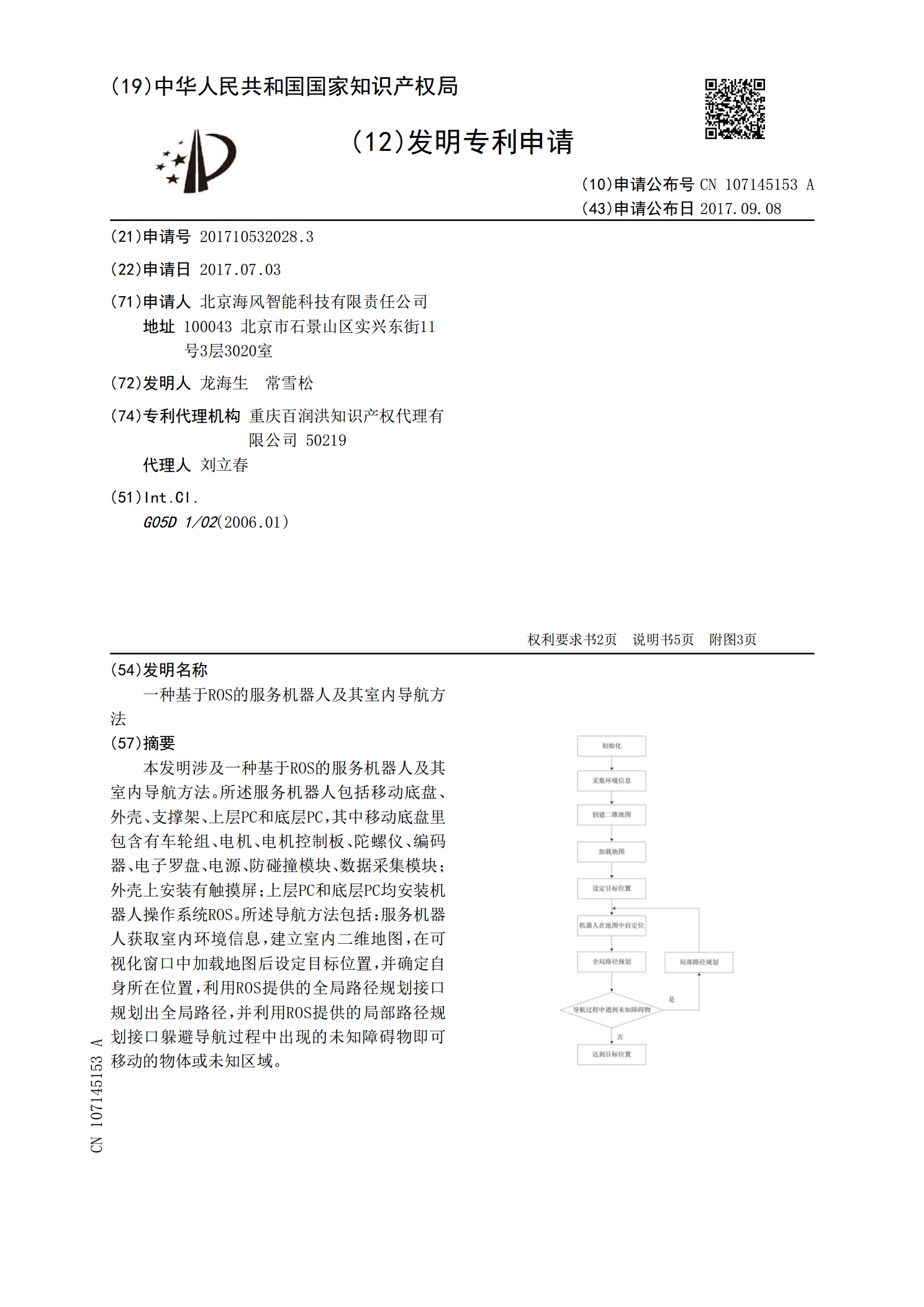
本发明涉及一种基于ROS的服务机器人及其室内导航方法。所述服务机器人包括移动底盘、外壳、支撑架、上层PC和底层PC,其中移动底盘里包含有车轮组、电机、电机控制板、陀螺仪、编码器、电子罗盘、电源、防碰撞模块、数据采集模块;外壳上安装有触摸屏;上层PC和底层PC均安装机器人操作系统ROS。所述导航方法包括:服务机器人获取室内环境信息,建立室内二维地图,在可视化窗口中加载地图后设定目标位置,并确定自身所在位置,利用ROS提供的全局路径规划接口规划出全局路径,并利用ROS提供的局部路径规划接口躲避导航过程中出现的
一种基于ROS的服务机器人及其语音交互导航方法.pdf
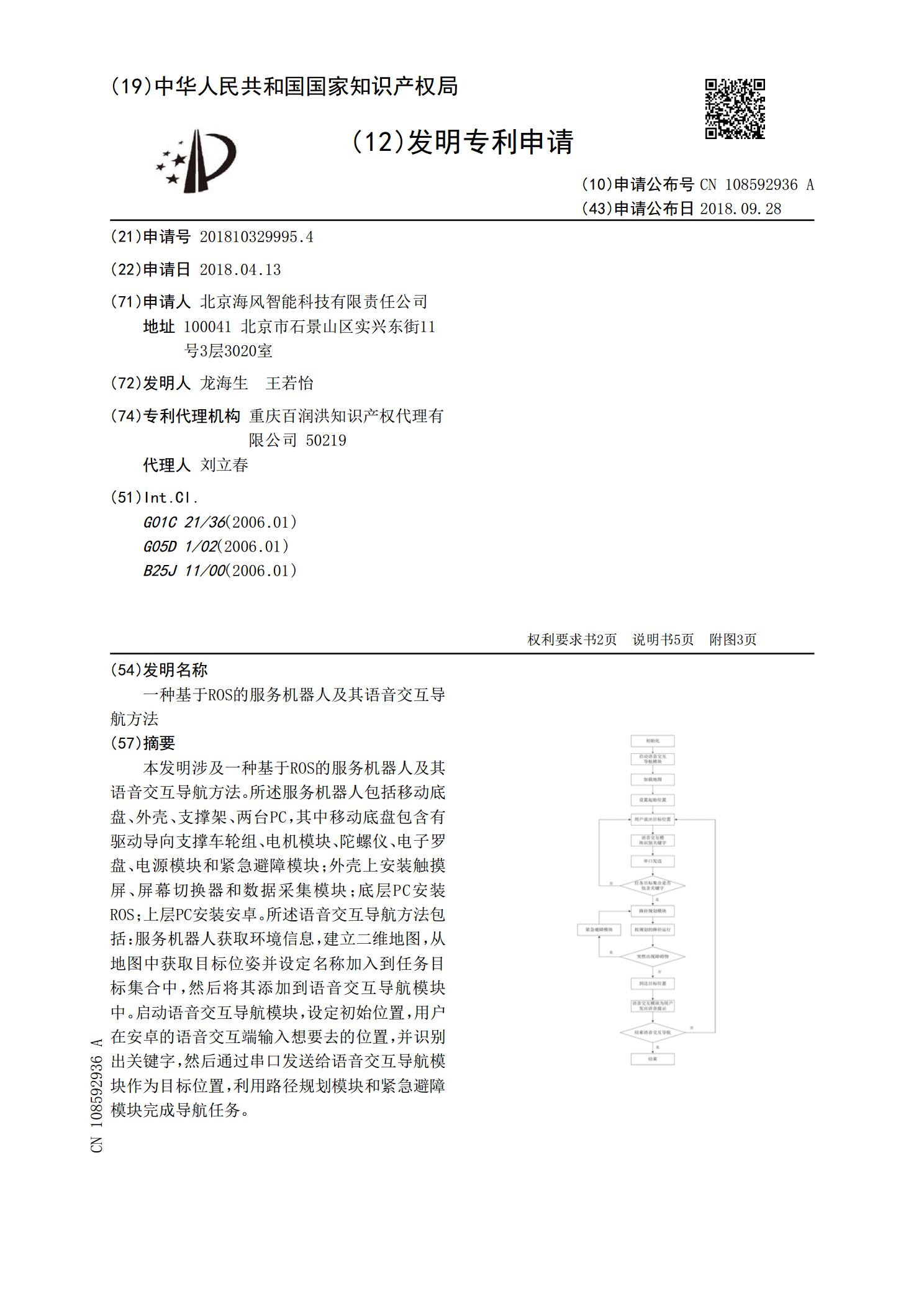
本发明涉及一种基于ROS的服务机器人及其语音交互导航方法。所述服务机器人包括移动底盘、外壳、支撑架、两台PC,其中移动底盘包含有驱动导向支撑车轮组、电机模块、陀螺仪、电子罗盘、电源模块和紧急避障模块;外壳上安装触摸屏、屏幕切换器和数据采集模块;底层PC安装ROS;上层PC安装安卓。所述语音交互导航方法包括:服务机器人获取环境信息,建立二维地图,从地图中获取目标位姿并设定名称加入到任务目标集合中,然后将其添加到语音交互导航模块中。启动语音交互导航模块,设定初始位置,用户在安卓的语音交互端输入想要去的位置,并
一种基于ROS的自主导航机器人.pdf
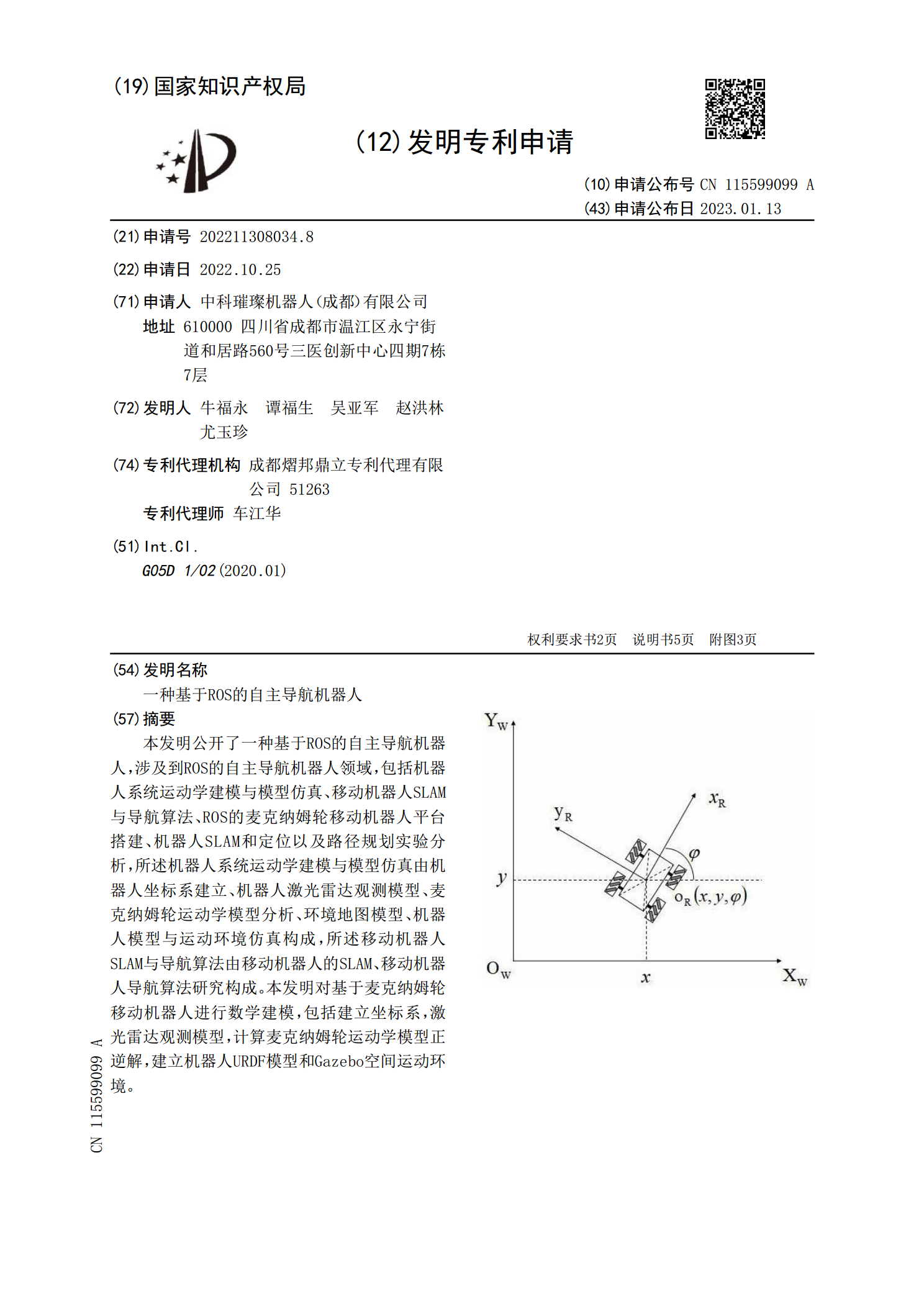
本发明公开了一种基于ROS的自主导航机器人,涉及到ROS的自主导航机器人领域,包括机器人系统运动学建模与模型仿真、移动机器人SLAM与导航算法、ROS的麦克纳姆轮移动机器人平台搭建、机器人SLAM和定位以及路径规划实验分析,所述机器人系统运动学建模与模型仿真由机器人坐标系建立、机器人激光雷达观测模型、麦克纳姆轮运动学模型分析、环境地图模型、机器人模型与运动环境仿真构成,所述移动机器人SLAM与导航算法由移动机器人的SLAM、移动机器人导航算法研究构成。本发明对基于麦克纳姆轮移动机器人进行数学建模,包括建立

基于ROS的室内巡航机器人设计与实现的任务书.docx
基于ROS的室内巡航机器人设计与实现的任务书任务书一、任务背景随着智能机器人技术的发展,室内巡航机器人在社会生产和生活中的应用越来越广泛。然而,在室内环境中,巡航机器人需要能够实现精确的定位和路径规划,以及对环境变化的适应能力。此外,室内环境中充满普通家庭可能不存在的各种障碍物,如移动家具等,机器人需要具备避障功能。因此,在这种复杂的环境中,开发一种智能、高效、灵活的室内巡航机器人,具备稳定的性能和良好的用户体验,对于社会具有重要意义。二、任务目标本任务旨在设计和实现一种基于ROS的室内巡航机器人,能够实