
一种跳跃度可调节的电机驱动式单腿跳跃机构.pdf

一只****呀9

1/9
2/9

3/9

4/9

5/9
6/9

7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种跳跃度可调节的电机驱动式单腿跳跃机构.pdf
一种跳跃度可调节的电机驱动式单腿跳跃机构,包括驱动电机、减速器、主动齿轮、从动齿轮、第一传动轴、第二传动轴、电磁离合器、绞盘、提拉绳、平行四边形机构、支撑架、平衡配重块、支脚、支撑铲、同步齿轮组及蓄力弹簧;驱动电机与减速器固连,主动齿轮安装在减速器上,从动齿轮固装在第一传动轴上,两齿轮啮合;第一传动轴通过电磁离合器与第二传动轴相连,绞盘固装在第二传动轴上;平行四边形机构的上角点通过同步齿轮组与支撑架相连,下角点与支脚相连;提拉绳一端与绞盘相连,另一端与支脚相连;蓄力弹簧连接在平行四边形机构的左右角点之间;
一种基于椭圆非圆齿轮驱动的单腿跳跃机构.pdf
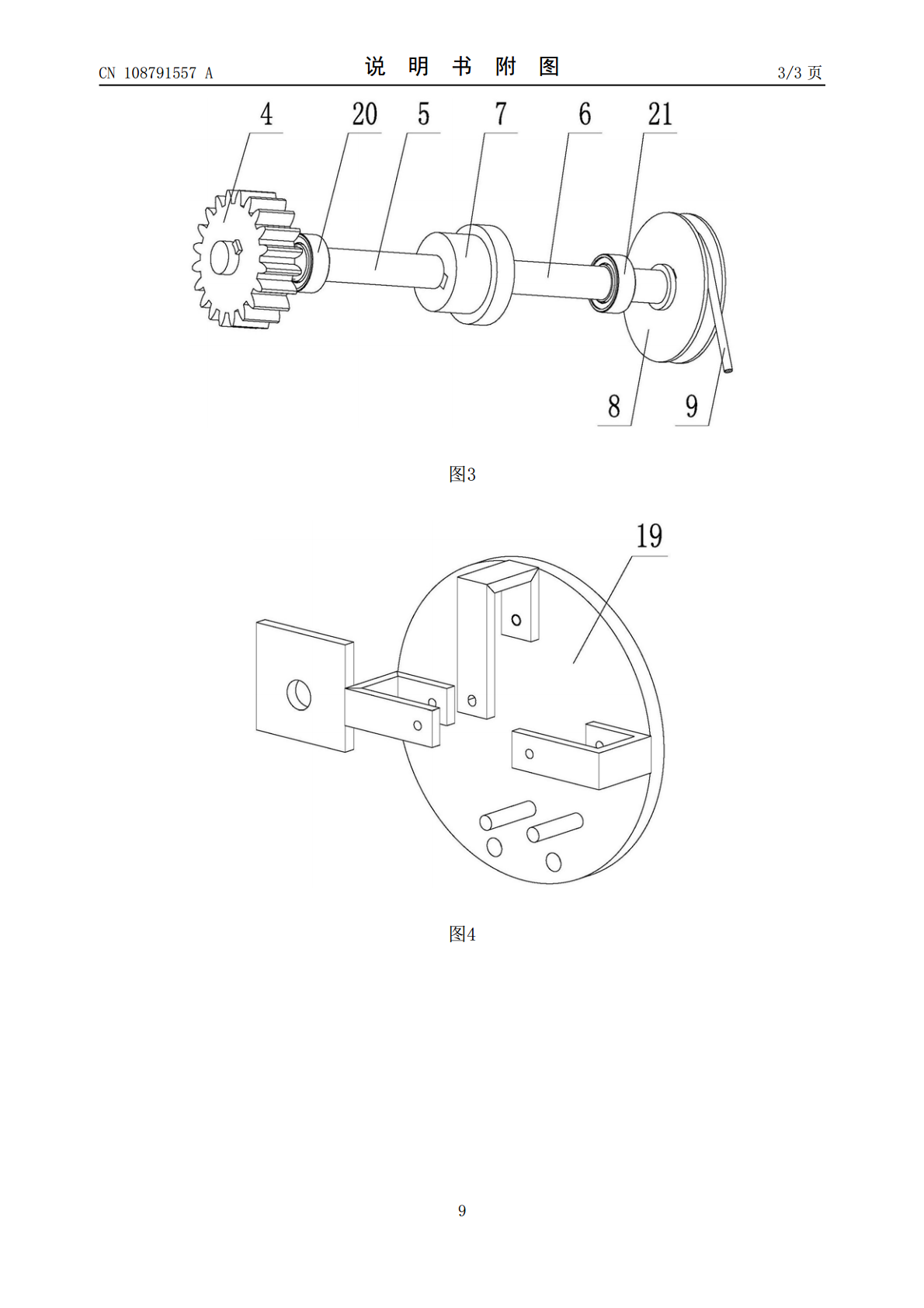
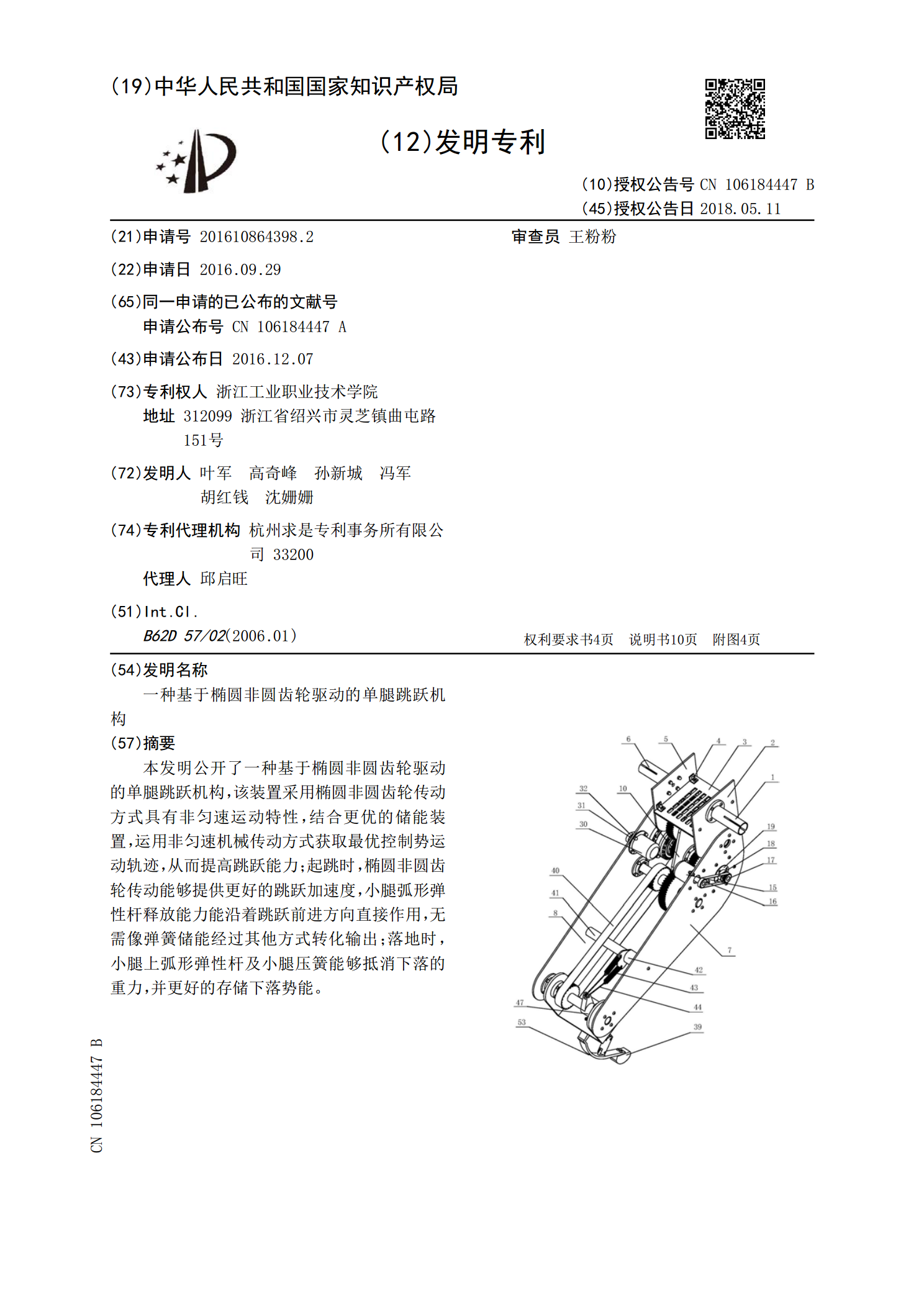
本发明公开了一种基于椭圆非圆齿轮驱动的单腿跳跃机构,该装置采用椭圆非圆齿轮传动方式具有非匀速运动特性,结合更优的储能装置,运用非匀速机械传动方式获取最优控制势运动轨迹,从而提高跳跃能力;起跳时,椭圆非圆齿轮传动能够提供更好的跳跃加速度,小腿弧形弹性杆释放能力能沿着跳跃前进方向直接作用,无需像弹簧储能经过其他方式转化输出;落地时,小腿上弧形弹性杆及小腿压簧能够抵消下落的重力,并更好的存储下落势能。

一种基于偏心非圆齿轮驱动的单腿跳跃机构.pdf
本发明公开了一种基于偏心非圆齿轮驱动的单腿跳跃机构,该装置采用偏心非圆齿轮传动方式具有非匀速运动特性,结合更优的储能装置,运用非匀速机械传动方式获取最优控制势运动轨迹,从而提高跳跃能力;起跳时,偏心非圆齿轮传动能够提供更好的跳跃加速度,小腿弧形弹性杆释放能力能沿着跳跃前进方向直接作用,无需像弹簧储能经过其他方式转化输出;落地时,小腿上弧形弹性杆及小腿压簧能够抵消下落的重力,并更好的存储下落势能。
一种基于傅里叶非圆齿轮驱动的单腿跳跃机构.pdf
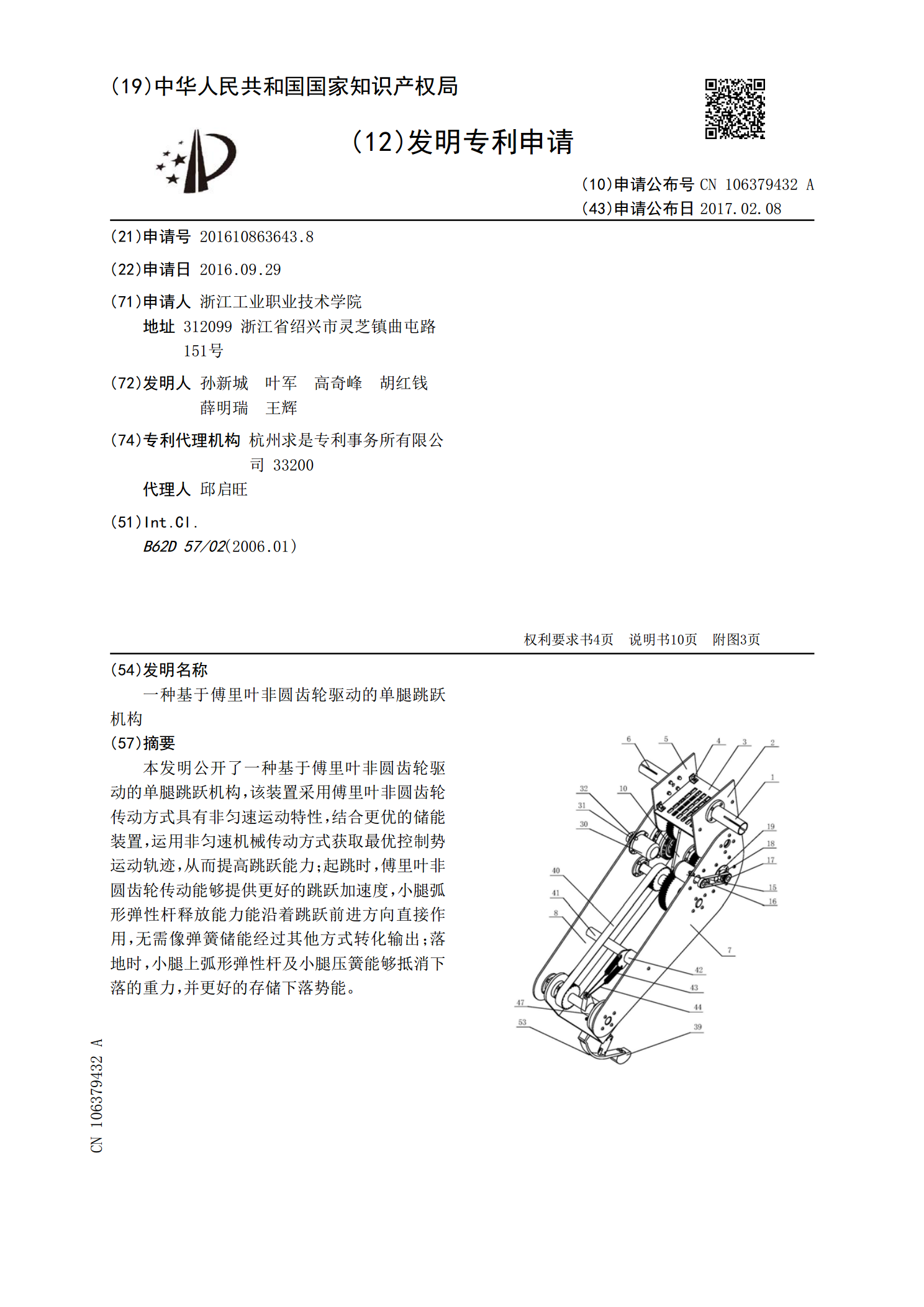
本发明公开了一种基于傅里叶非圆齿轮驱动的单腿跳跃机构,该装置采用傅里叶非圆齿轮传动方式具有非匀速运动特性,结合更优的储能装置,运用非匀速机械传动方式获取最优控制势运动轨迹,从而提高跳跃能力;起跳时,傅里叶非圆齿轮传动能够提供更好的跳跃加速度,小腿弧形弹性杆释放能力能沿着跳跃前进方向直接作用,无需像弹簧储能经过其他方式转化输出;落地时,小腿上弧形弹性杆及小腿压簧能够抵消下落的重力,并更好的存储下落势能。

一种微电机驱动四杆直线仿生跳跃机构.pdf
本发明公开了一种微电机驱动四杆直线仿生跳跃机构,通过模仿蝗虫后腿起跳过程中的膝关节转角变化规律,以及胫节末端的轨迹,实现起跳阶段的受力状态与蝗虫相似。通过微电机和减速箱驱动齿轮运动,并带动直线四杆直线运动,在不完全齿轮与低速齿轮啮合传动时,腿节连杆与胫节连杆之间夹角逐渐减小,拉伸弹簧长度不断增长,弹簧势能不断增加;当不完全齿轮的无齿部分与低速端传动时,拉伸弹簧受到的约束突然解除,在弹簧力作用下,跳跃机构蹬地完成跳跃过程,弹性势能转换为重力势能,实现仿生跳跃。利用不完全齿轮与减速齿轮传动,同时实现连杆机构的