
一种高压线巡检机器人.pdf

一条****丹淑


1/10

2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种高压线巡检机器人.pdf
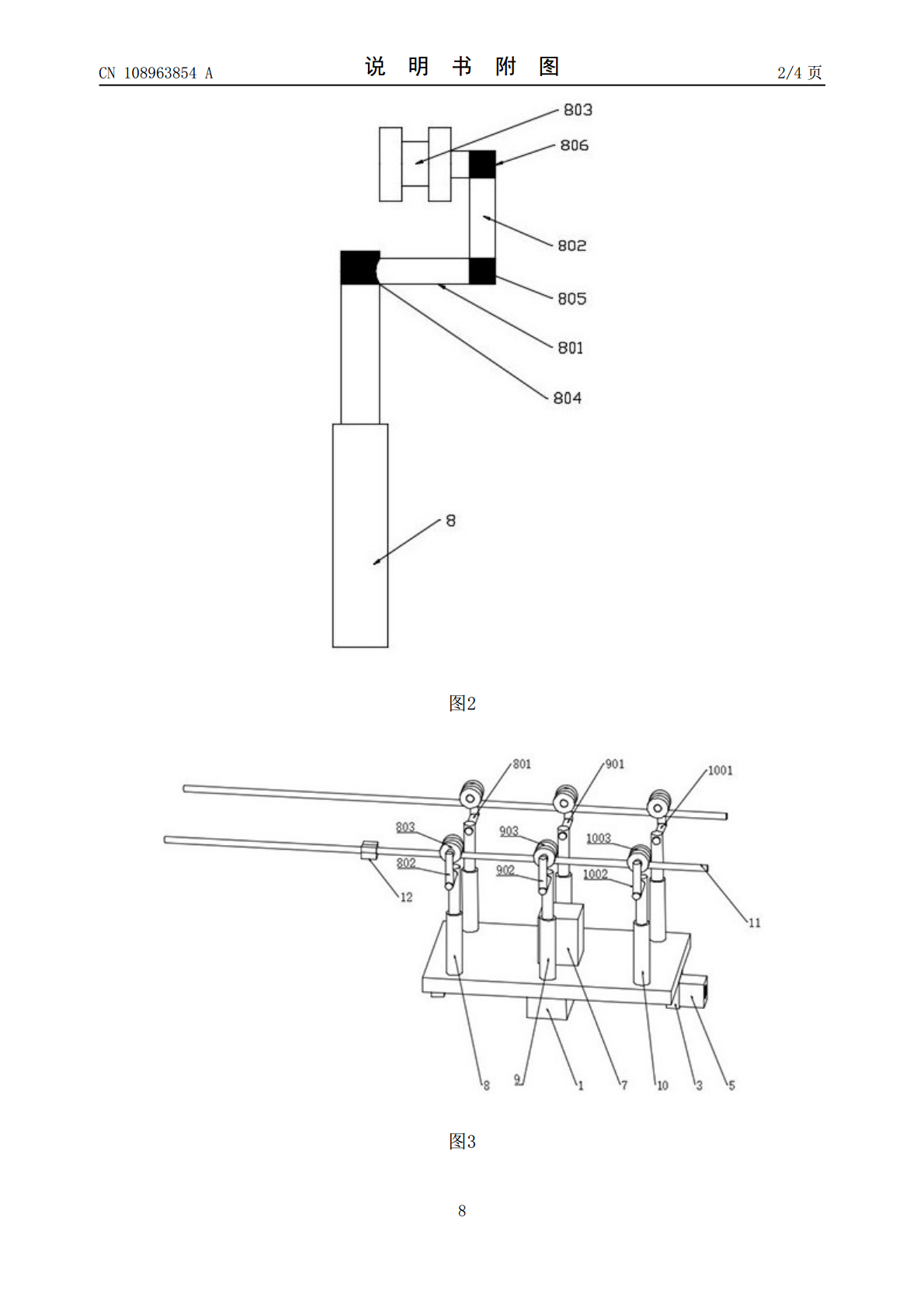
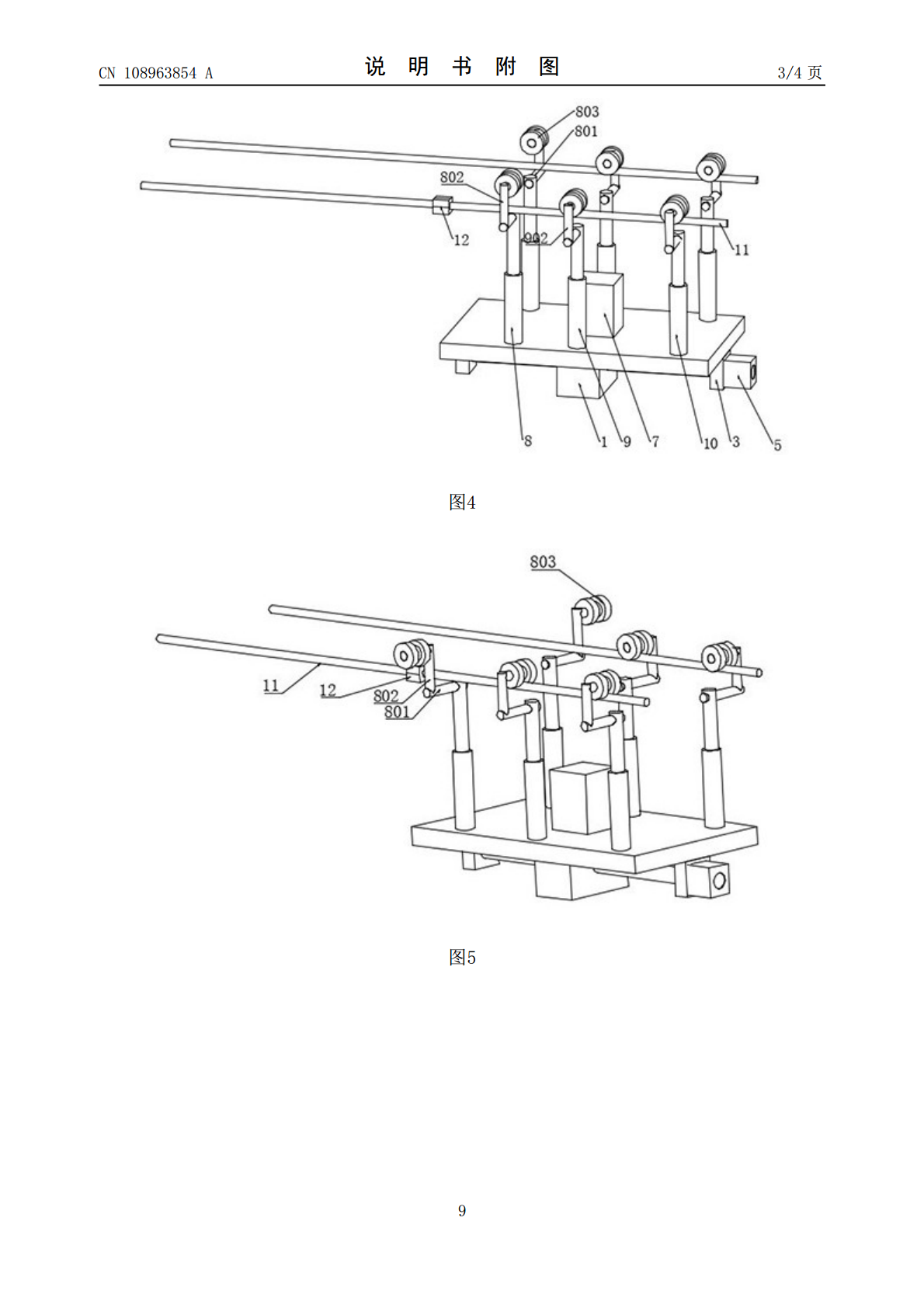
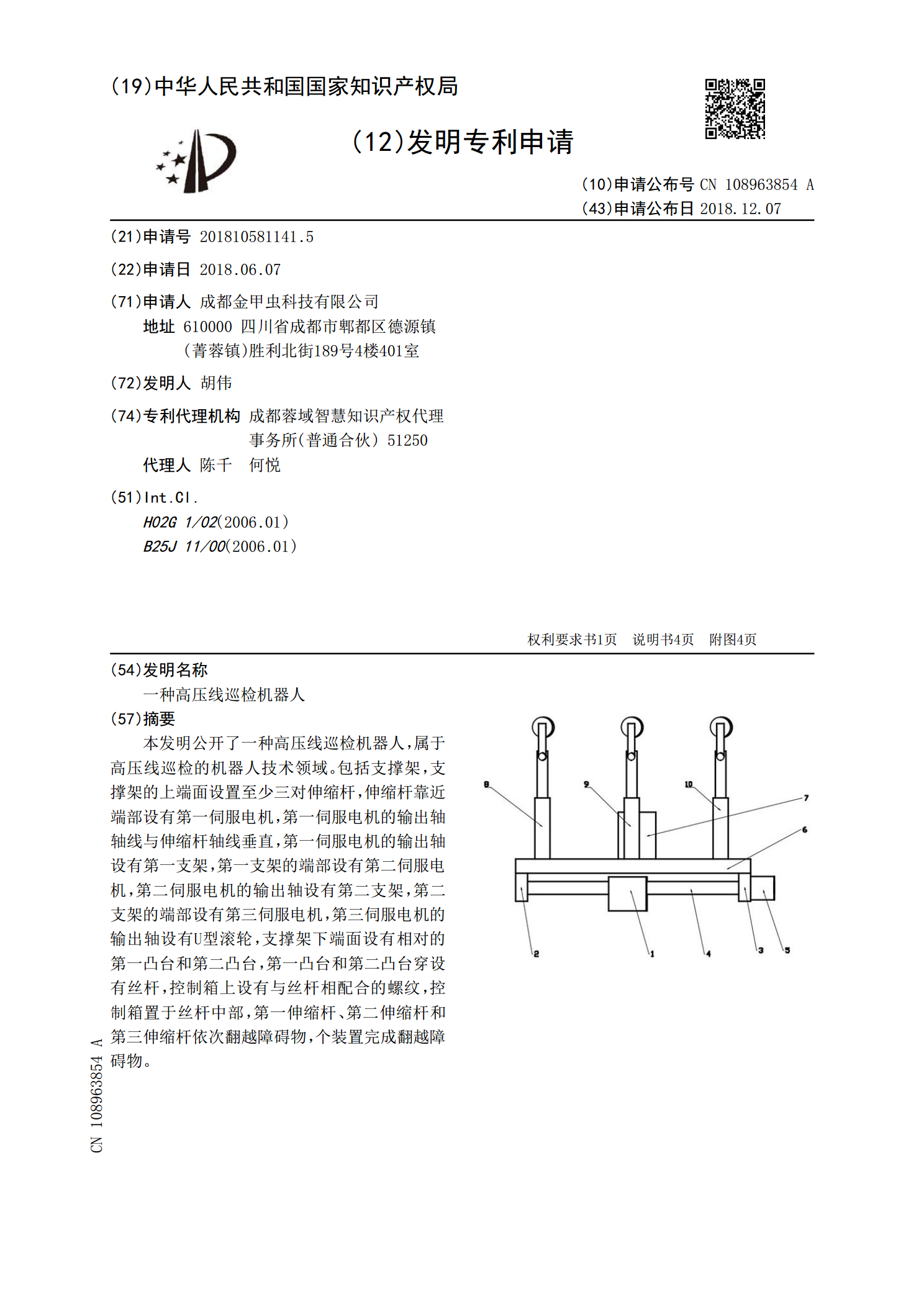
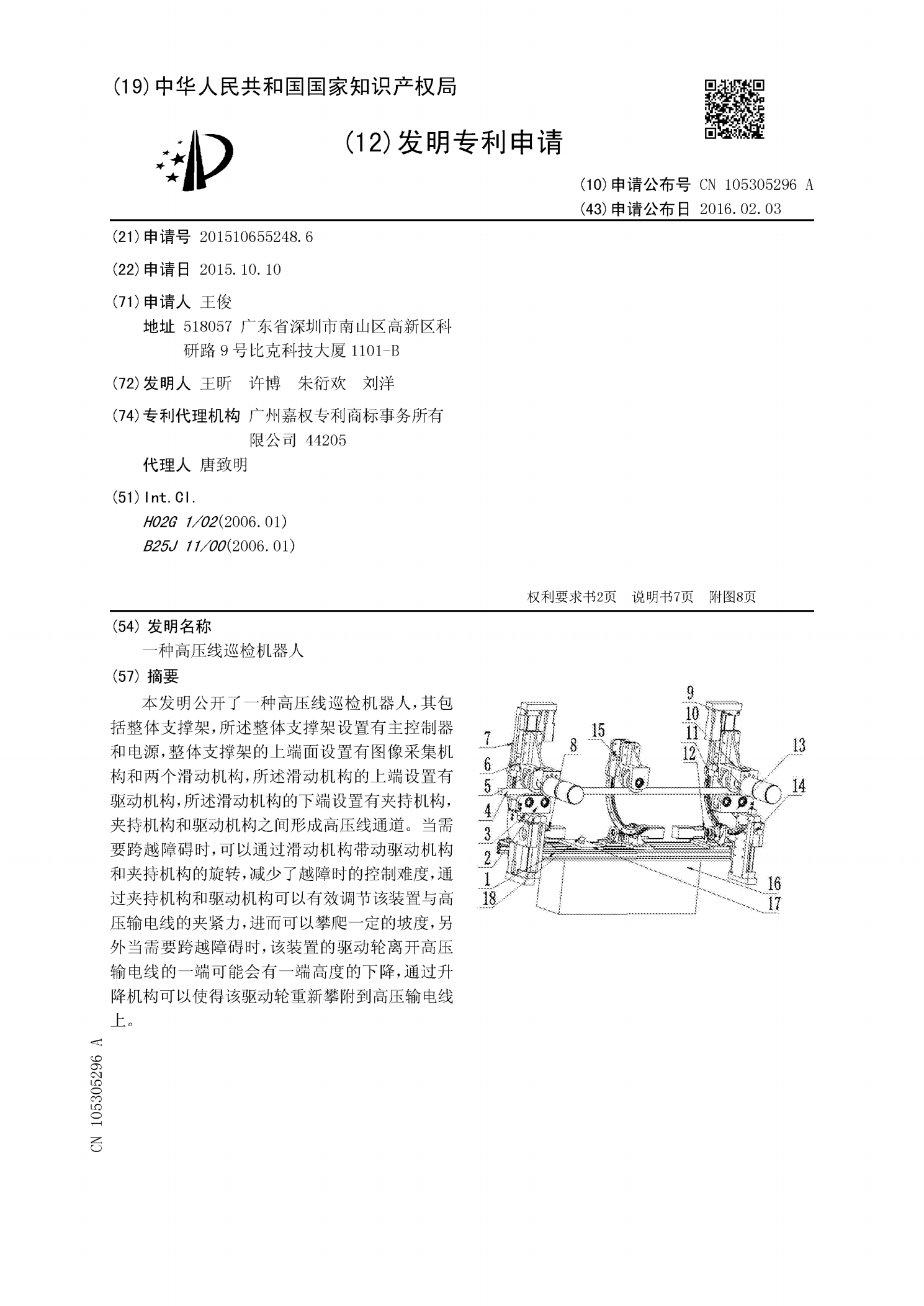
本发明公开了一种高压线巡检机器人,属于高压线巡检的机器人技术领域。包括支撑架,支撑架的上端面设置至少三对伸缩杆,伸缩杆靠近端部设有第一伺服电机,第一伺服电机的输出轴轴线与伸缩杆轴线垂直,第一伺服电机的输出轴设有第一支架,第一支架的端部设有第二伺服电机,第二伺服电机的输出轴设有第二支架,第二支架的端部设有第三伺服电机,第三伺服电机的输出轴设有U型滚轮,支撑架下端面设有相对的第一凸台和第二凸台,第一凸台和第二凸台穿设有丝杆,控制箱上设有与丝杆相配合的螺纹,控制箱置于丝杆中部,第一伸缩杆、第二伸缩杆和第三伸缩杆
一种高压线巡检机器人.pdf
本发明公开了一种高压线巡检机器人,其包括整体支撑架,所述整体支撑架设置有主控制器和电源,整体支撑架的上端面设置有图像采集机构和两个滑动机构,所述滑动机构的上端设置有驱动机构,所述滑动机构的下端设置有夹持机构,夹持机构和驱动机构之间形成高压线通道。当需要跨越障碍时,可以通过滑动机构带动驱动机构和夹持机构的旋转,减少了越障时的控制难度,通过夹持机构和驱动机构可以有效调节该装置与高压输电线的夹紧力,进而可以攀爬一定的坡度,另外当需要跨越障碍时,该装置的驱动轮离开高压输电线的一端可能会有一端高度的下降,通过升降机

一种高压线智能巡检机器人及其巡检方法.pdf
本发明公开了一种高压线智能巡检机器人及其巡检方法,该机器人包括移动模块、悬臂、测量模块和控制模块,移动模块包括两个轮组,分别设置在悬臂的两端,高压线穿过两个轮组,测量模块设置在悬臂的最下方,控制模块悬挂在悬臂内弧的最低端,包括机器人控制器、通信模块和电源,机器人通过通信模块与地面终端平台进行数据通信,机器人控制器控制轮组压紧高压线并沿高压线移动,电源为机器人各部件供电。本发明轮组压紧高压线并在电机带动下沿高压线移动,在移动过程中,测量模块进行各种检测,可以实现不间断地对高压线进行自主往返巡检,实现高清检测

一种用于高压线除冰巡检机器人.pdf
本发明公开了一种用于高压线除冰巡检机器人,属于高压线除冰巡检机器人领域。包括支撑架,支撑架的上端面设置三个伸缩杆,所述伸缩杆上设有滑动组件,伸缩杆上设有第一支架,第一支架的两端部均设有第一伺服电机,第一伺服电机输出轴设有第二支架,第二支架的端部设有第二伺服电机,第二伺服电机的输出轴设有第三支架,第三支架端部设有U型滚轮,运动前沿一侧的伸缩杆的顶部设有第四支架,第四支架端部设有第三伺服电机,第三伺服电机的输出轴设有一横板,横板两端均设有除冰支架,除冰支架的两侧都设有第四伺服电机,第四伺服电机输出轴设有相啮合

一种高压线全自动巡检机器人.pdf
本发明公开了一种高压线全自动巡检机器人,包括地面车机构,所述地面车机构包括左右两侧设有履带轮的车体;所述车体上设有放置架机构,所述放置架机构上安装有爬杆机构,所述爬杆机构上安装有爬线机构;所述放置架机构包括载物板,所述车体设有两个竖直板,每个竖直板上均设有一水平滑槽,每个竖直板的一端均延伸有一长条板,每个长条板上均设有竖直滑槽;所述载物板位于两个竖直板之间,所述载物板的一端两侧设有穿过水平滑槽的第一凸柱、另一端两侧设有穿过竖直滑槽的第二凸柱;所述车体上并排设有两个第一电动推杆与载物板两侧的第一凸柱铰接;该