
一种被动柔顺上肢康复机器人的末端执行装置.pdf

东耀****哥哥

1/7
2/7
3/7
4/7
5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种被动柔顺上肢康复机器人的末端执行装置.pdf
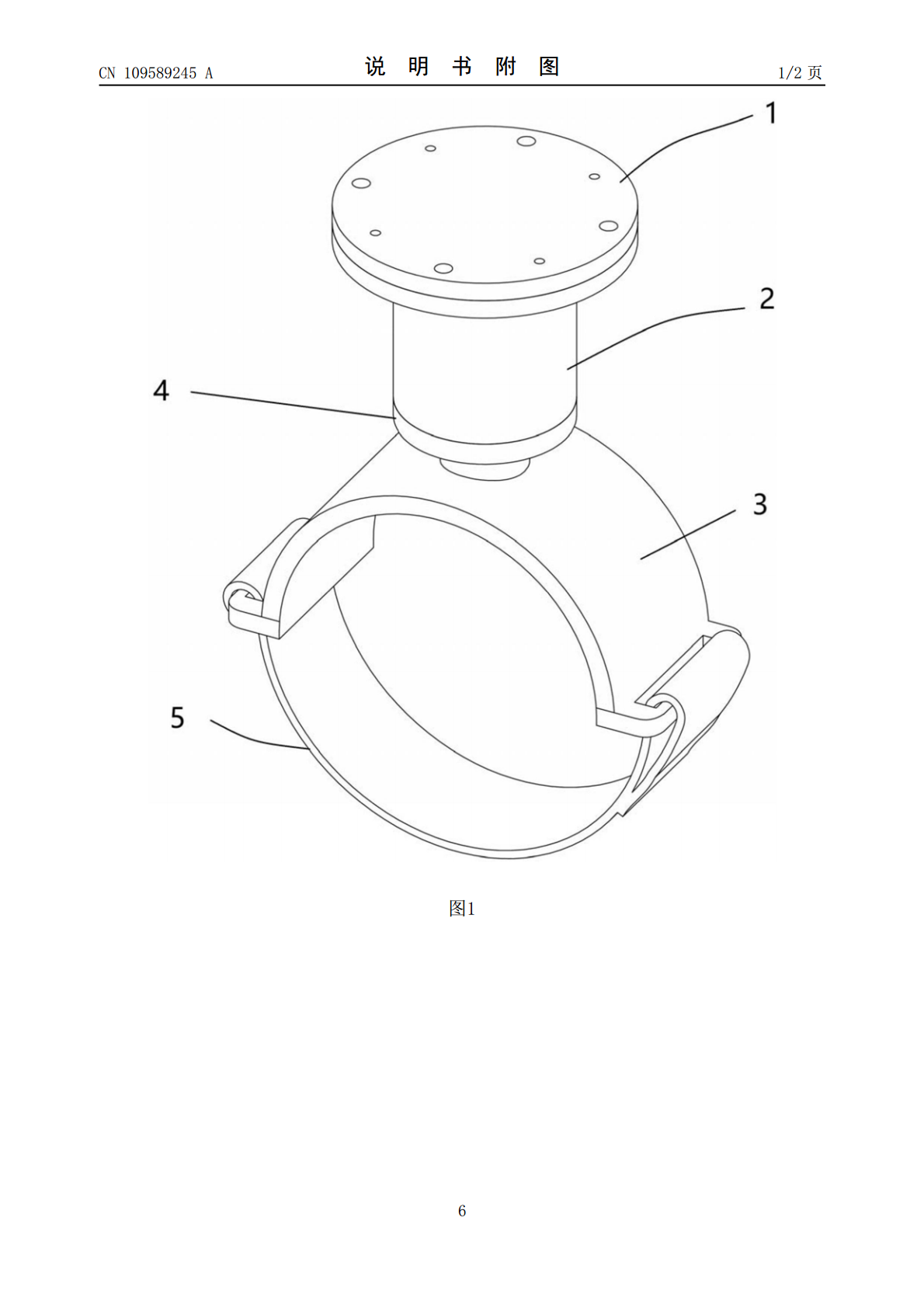
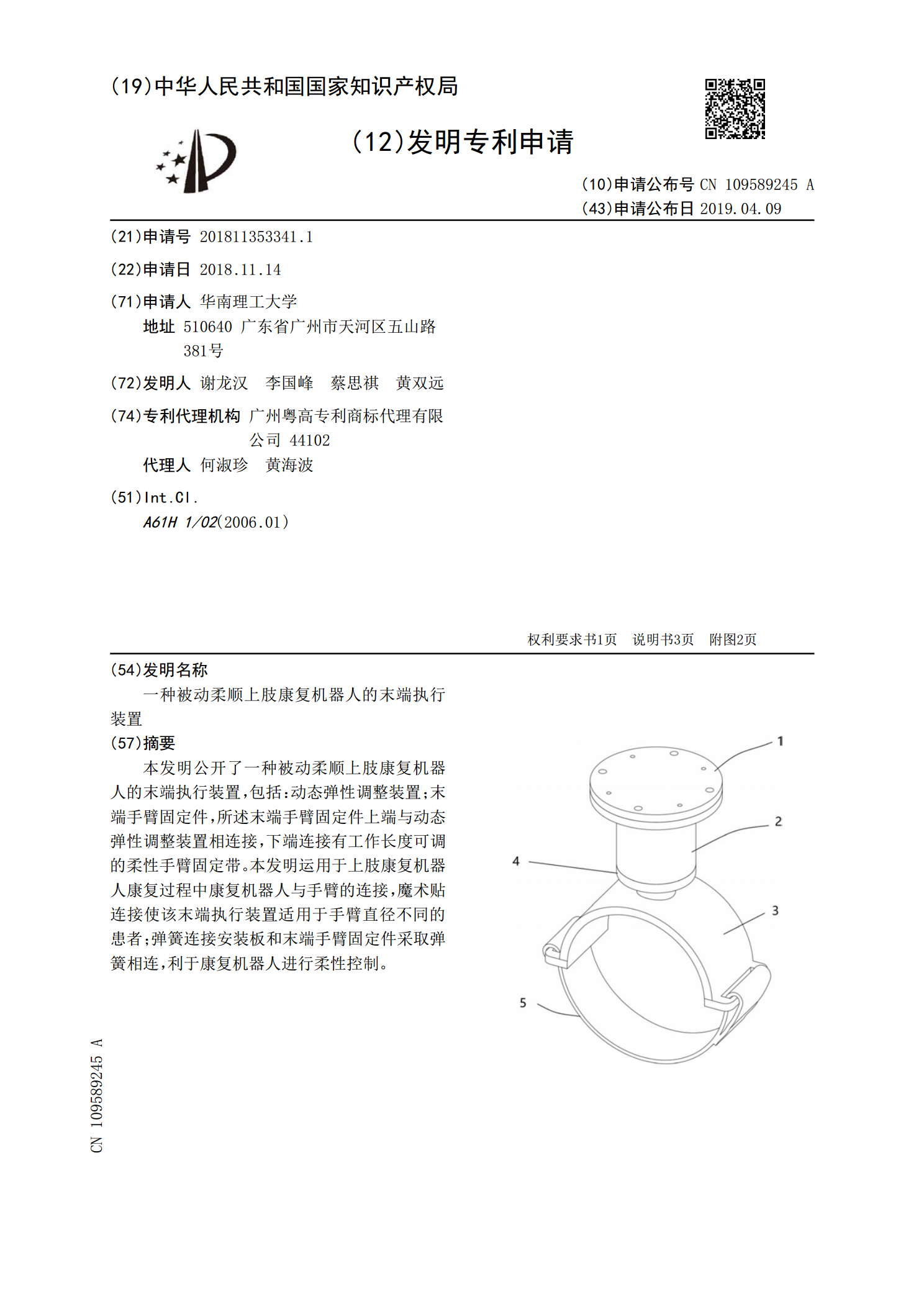
本发明公开了一种被动柔顺上肢康复机器人的末端执行装置,包括:动态弹性调整装置;末端手臂固定件,所述末端手臂固定件上端与动态弹性调整装置相连接,下端连接有工作长度可调的柔性手臂固定带。本发明运用于上肢康复机器人康复过程中康复机器人与手臂的连接,魔术贴连接使该末端执行装置适用于手臂直径不同的患者;弹簧连接安装板和末端手臂固定件采取弹簧相连,利于康复机器人进行柔性控制。
一种末端牵引式上肢康复机器人.pdf
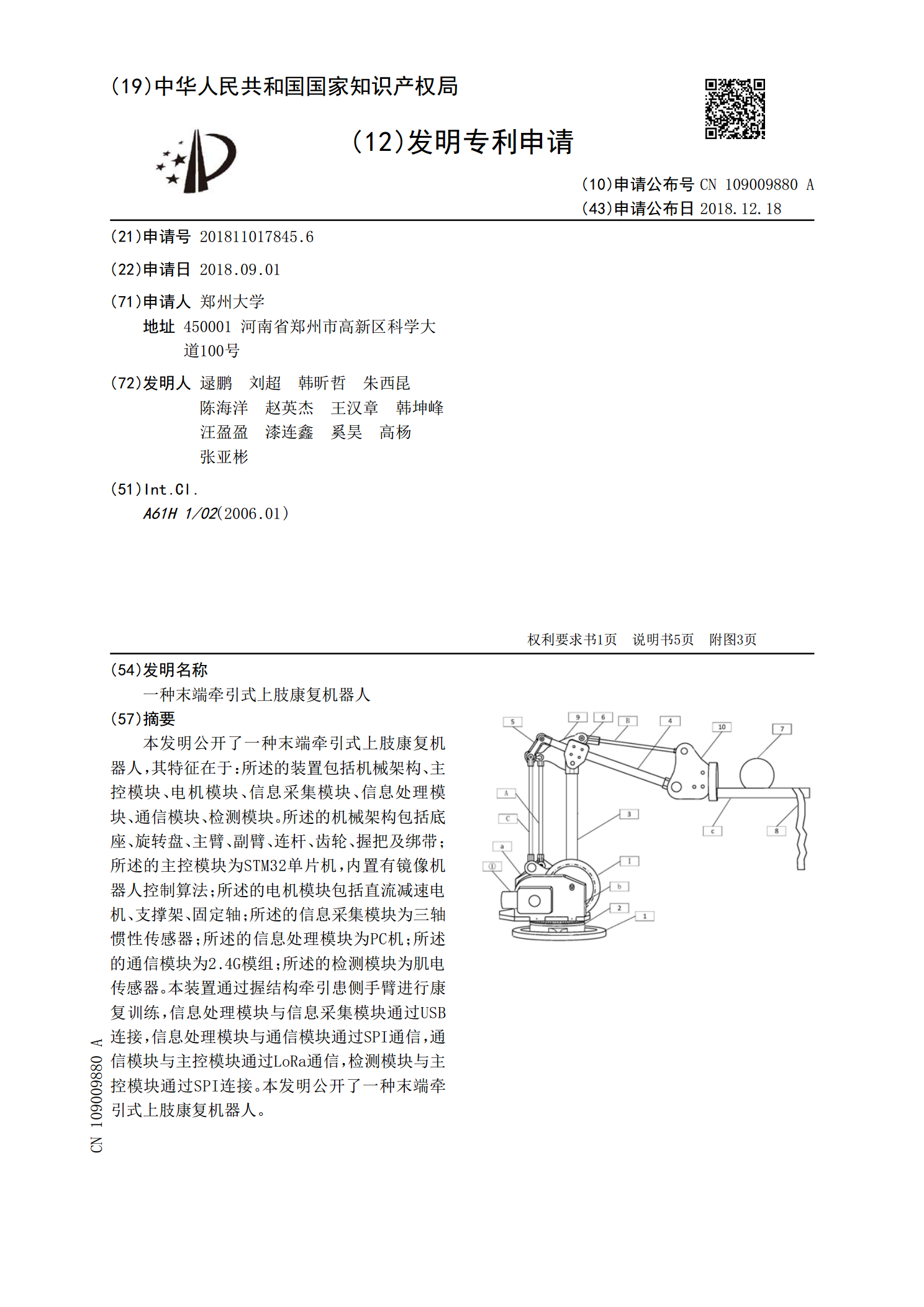
本发明公开了一种末端牵引式上肢康复机器人,其特征在于:所述的装置包括机械架构、主控模块、电机模块、信息采集模块、信息处理模块、通信模块、检测模块。所述的机械架构包括底座、旋转盘、主臂、副臂、连杆、齿轮、握把及绑带;所述的主控模块为STM32单片机,内置有镜像机器人控制算法;所述的电机模块包括直流减速电机、支撑架、固定轴;所述的信息采集模块为三轴惯性传感器;所述的信息处理模块为PC机;所述的通信模块为2.4G模组;所述的检测模块为肌电传感器。本装置通过握结构牵引患侧手臂进行康复训练,信息处理模块与信息采集模

一种单侧上肢被动康复训练装置.pdf
本发明提供一种单侧上肢被动康复训练装置,包括底座,座椅,上下位置调整机构、左、右两侧上肢康复训练装置,左、右两侧上肢康复训练装置都装有前后方向设置的直线导轨和滑块机构、齿轮齿条机构,一侧上肢康复训练装置通过中间移动台带动另一侧上肢康复训练装置同向前后移动,同时通过齿轮齿条啮合,使其移动时必须转动,右侧上肢康复训练装置采用可调整位置的双齿条,可以使不同的齿条与齿轮啮合,使患者一侧上肢前端主动做画圆运动同时前后移动带动台带动另一侧上肢前端被动进行同向或反向做画圆运动同时做同向前后移动,结构简单、安全性高。
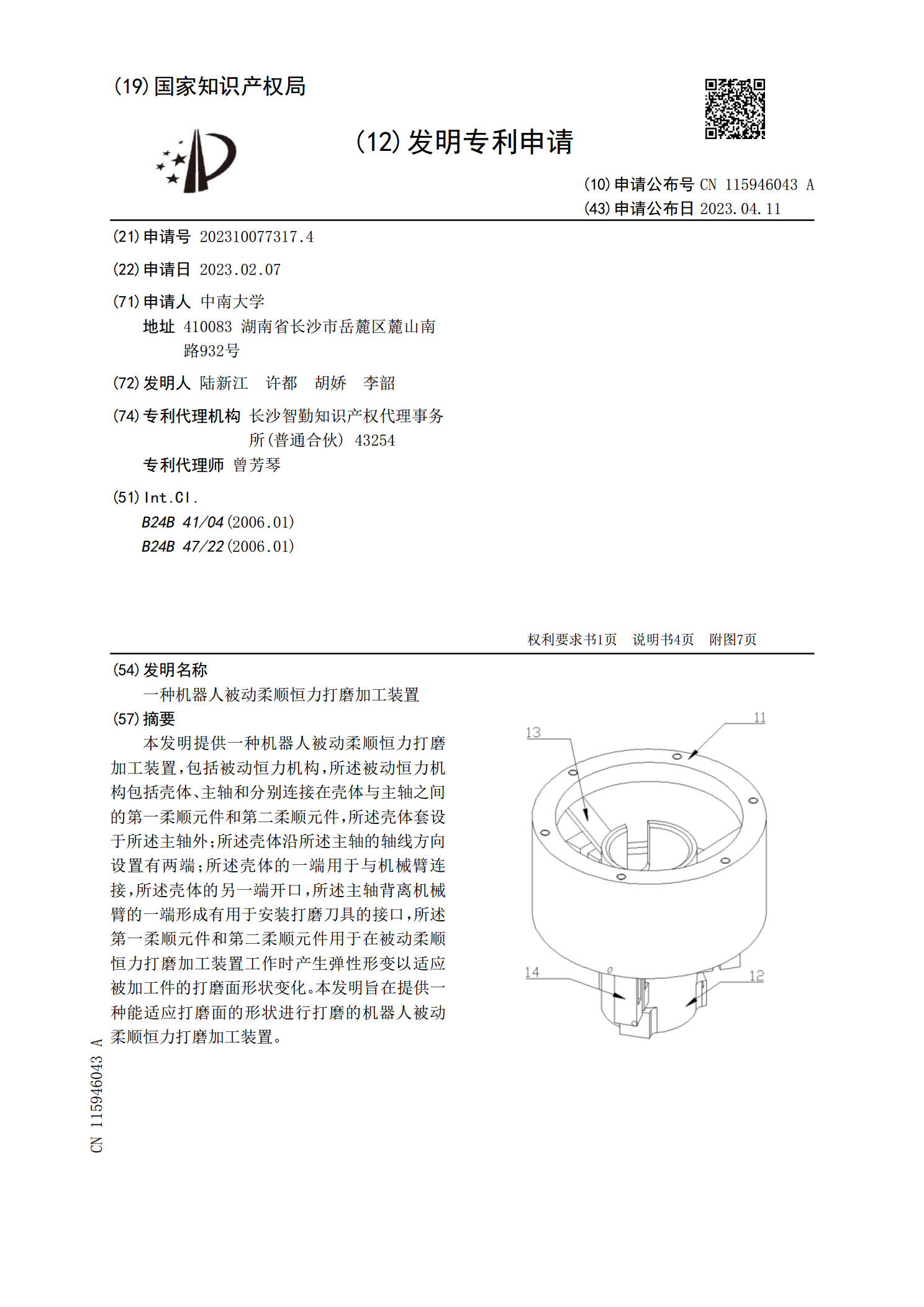
一种机器人被动柔顺恒力打磨加工装置.pdf
本发明提供一种机器人被动柔顺恒力打磨加工装置,包括被动恒力机构,所述被动恒力机构包括壳体、主轴和分别连接在壳体与主轴之间的第一柔顺元件和第二柔顺元件,所述壳体套设于所述主轴外;所述壳体沿所述主轴的轴线方向设置有两端;所述壳体的一端用于与机械臂连接,所述壳体的另一端开口,所述主轴背离机械臂的一端形成有用于安装打磨刀具的接口,所述第一柔顺元件和第二柔顺元件用于在被动柔顺恒力打磨加工装置工作时产生弹性形变以适应被加工件的打磨面形状变化。本发明旨在提供一种能适应打磨面的形状进行打磨的机器人被动柔顺恒力打磨加工装置
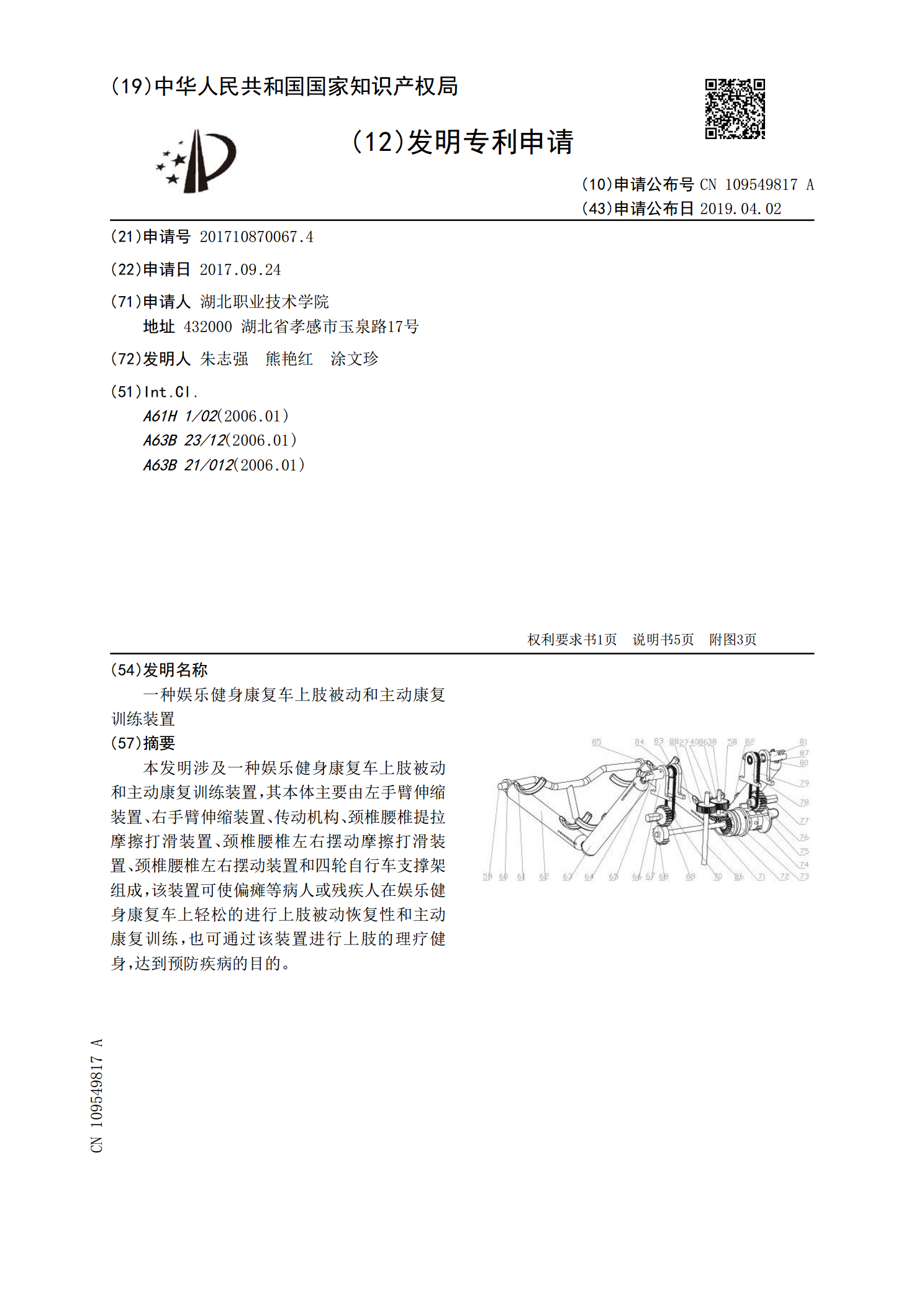
一种娱乐健身康复车上肢被动和主动康复训练装置.pdf
本发明涉及一种娱乐健身康复车上肢被动和主动康复训练装置,其本体主要由左手臂伸缩装置、右手臂伸缩装置、传动机构、颈椎腰椎提拉摩擦打滑装置、颈椎腰椎左右摆动摩擦打滑装置、颈椎腰椎左右摆动装置和四轮自行车支撑架组成,该装置可使偏瘫等病人或残疾人在娱乐健身康复车上轻松的进行上肢被动恢复性和主动康复训练,也可通过该装置进行上肢的理疗健身,达到预防疾病的目的。