
一种襟翼分离式垂直起降飞机.pdf

猫巷****雪凝

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种襟翼分离式垂直起降飞机.pdf
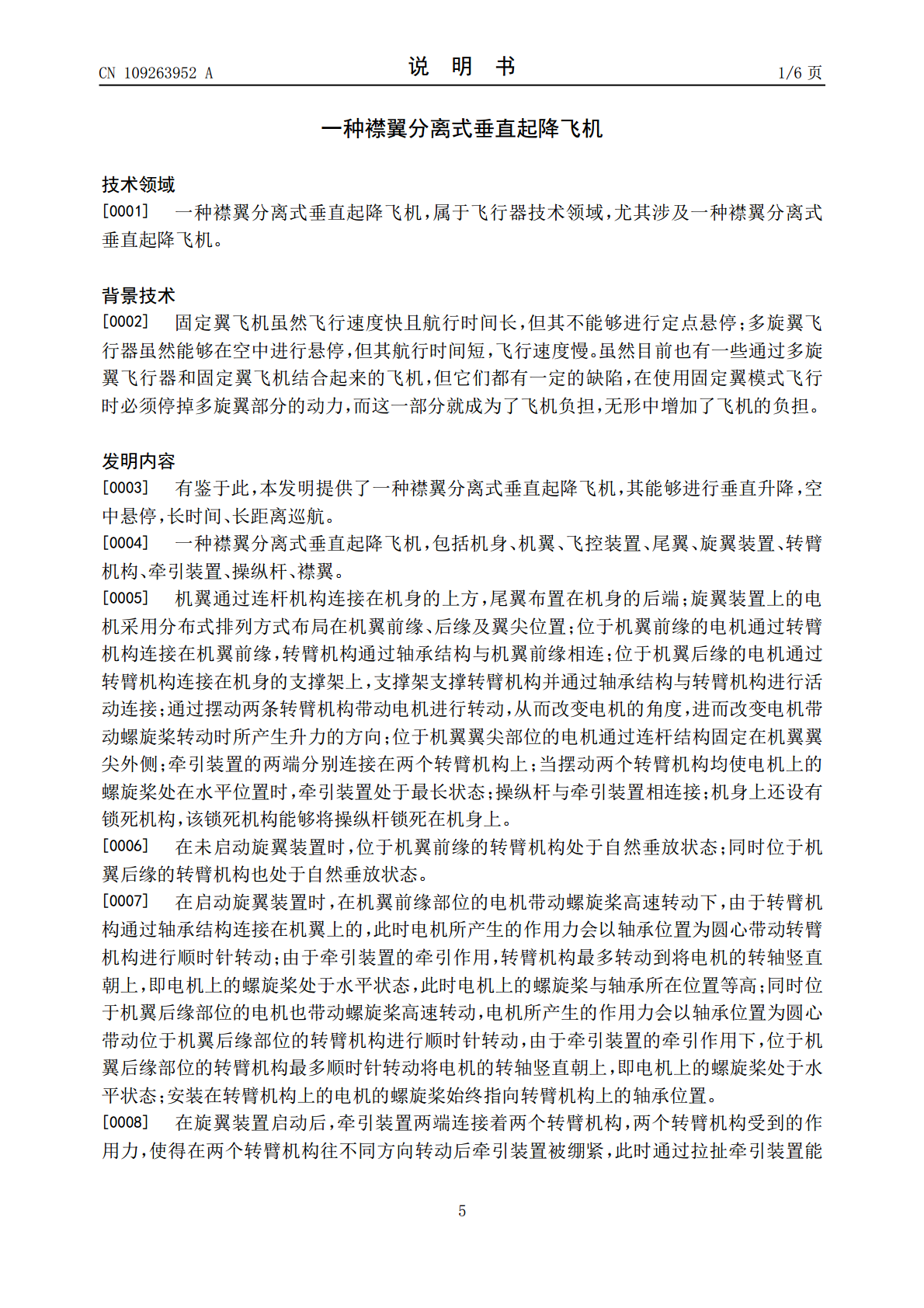
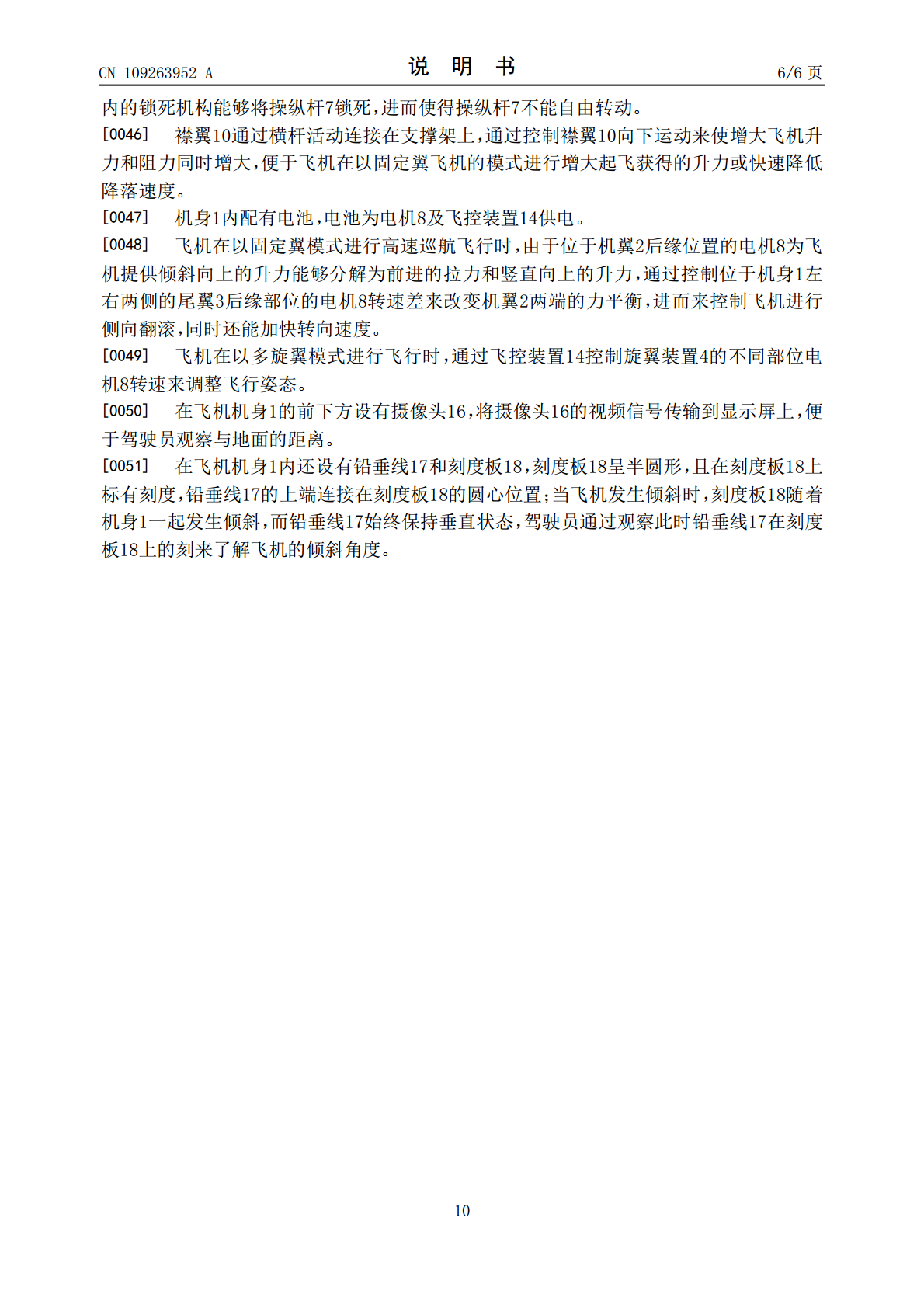
一种襟翼分离式垂直起降飞机,属于飞行器技术领域,包括机身、机翼、飞控装置、尾翼、旋翼装置、转臂机构、牵引装置、操纵杆、襟翼。机翼通过连杆结构布置在机身的上方,尾翼布置在机身的后端;旋翼装置上的电机采用分布式排列方式布局;位于机翼前缘电机通过转臂机构连接在机翼前缘;位于机翼后缘的电机通过转臂机构连接在机身的支撑架上;通过摆动转臂机构改变电机带动螺旋桨转动时所产生升力的方向;位于机翼翼尖部位的电机通过连杆结构固定在机翼翼尖外侧;牵引装置的两端分别连接在两个转臂机构上,操纵杆与牵引装置相连接;襟翼通过横杆活动连
一种垂直起降飞机.pdf
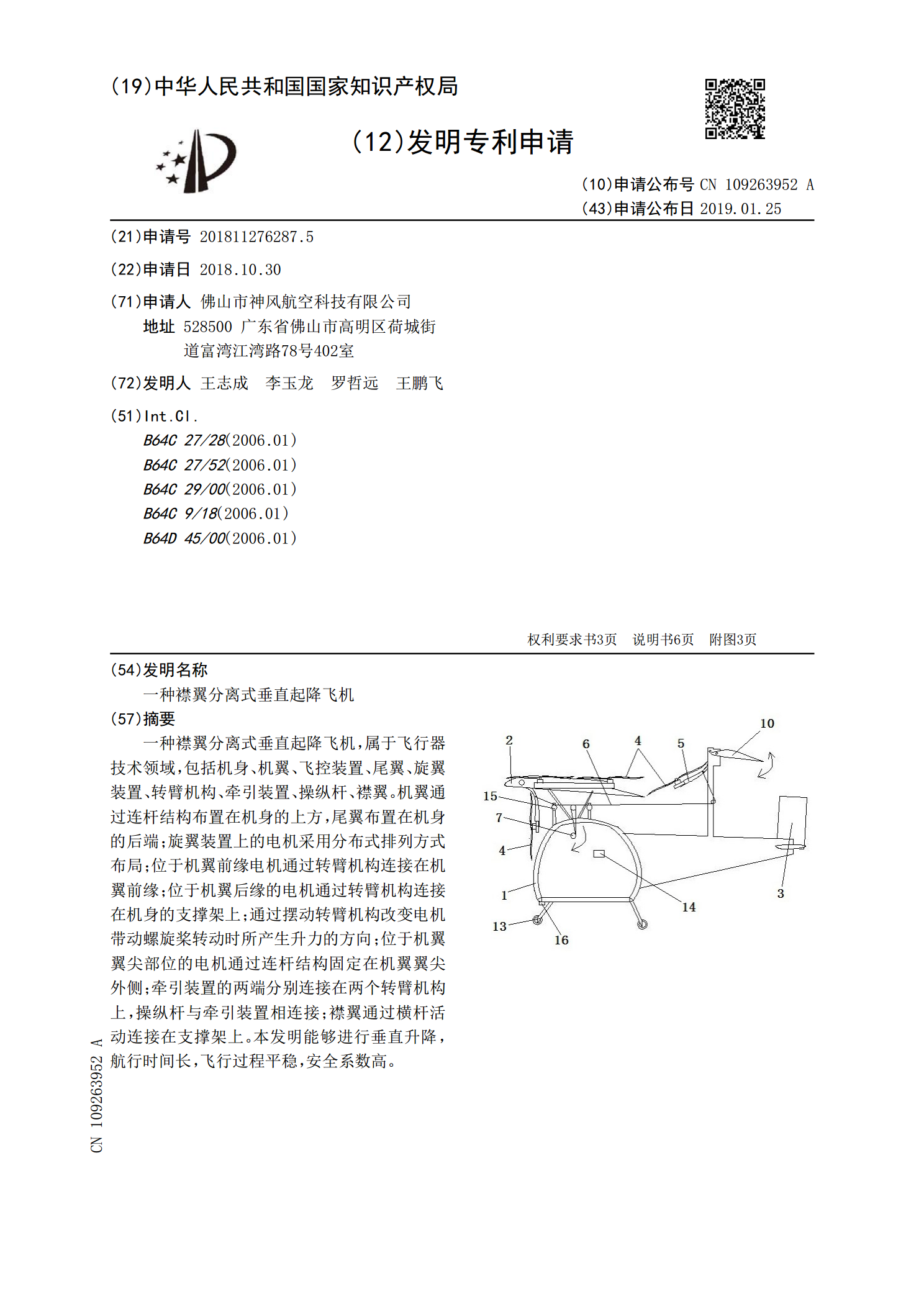
一种垂直起降飞机,属于飞行器技术领域,包括机身、机翼、换向升力装置、垂直升力装置、转向螺旋桨、雪橇式起落架。机身内设有主控器,主控器与换向升力装置、垂直升力装置及转向螺旋桨相连接;机翼采用后掠翼式;换向升力装置位于机身前端,在主控器的控制下能够进行多角度转向,为飞机提供垂直方向的升力或前进的拉力,同时还能通过改变拉力的方向来改变飞机的航向;垂直升力装置采用电机带动桨叶转动的形式为飞机提供向上的升力,垂直升力装置通过支撑杆固定在机翼的后缘上。本发明能够进行垂直升降,航行时间长,飞行过程平稳,安全系数高,适用
一种垂直起降飞机.pdf
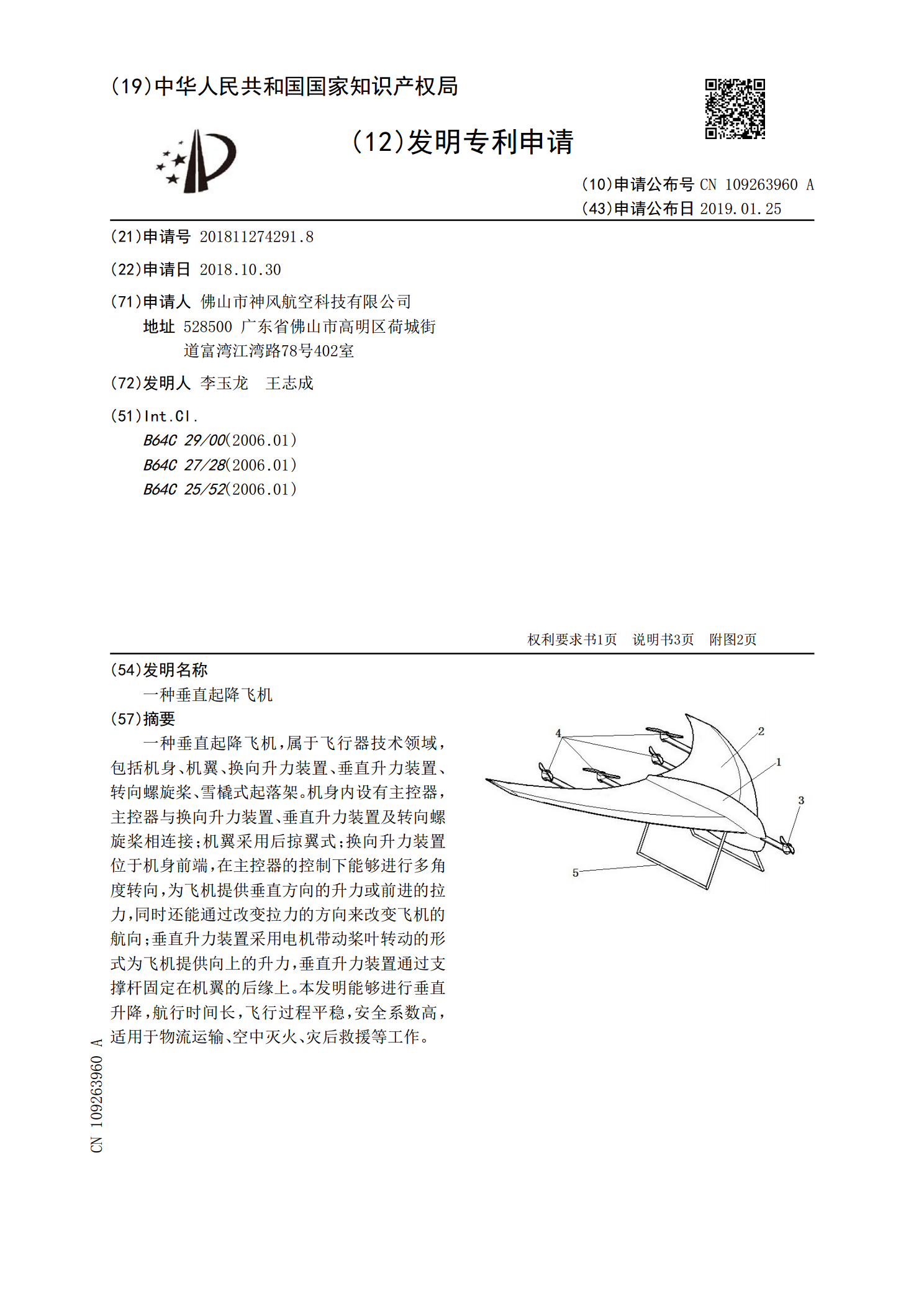
一种垂直起降飞机,属于飞行器技术领域,包括机身、机翼、尾翼、多旋翼装置、驱动装置、传动杆;机身两侧的机翼上方各设有一个凹槽,凹槽平行于机身的中轴线;尾翼采用双垂尾翼。驱动装置通过齿轮结构与传动杆相连接,使得驱动装置带动传动杆在机翼的凹槽内转动;多旋翼装置有两个;传动杆呈U字形;传动杆的两条纵向杆分别在机翼的两个凹槽内进行转动,传动杆的上端分别固定在两个多旋翼装置的重心位置的机架上;在传动杆的横向杆上设有一个蜗轮;驱动装置的转动时带动蜗杆转动,转动的蜗杆带动蜗轮转动,传动杆带动两个多旋翼装置转动。本发明能够
垂直起降飞机.pdf
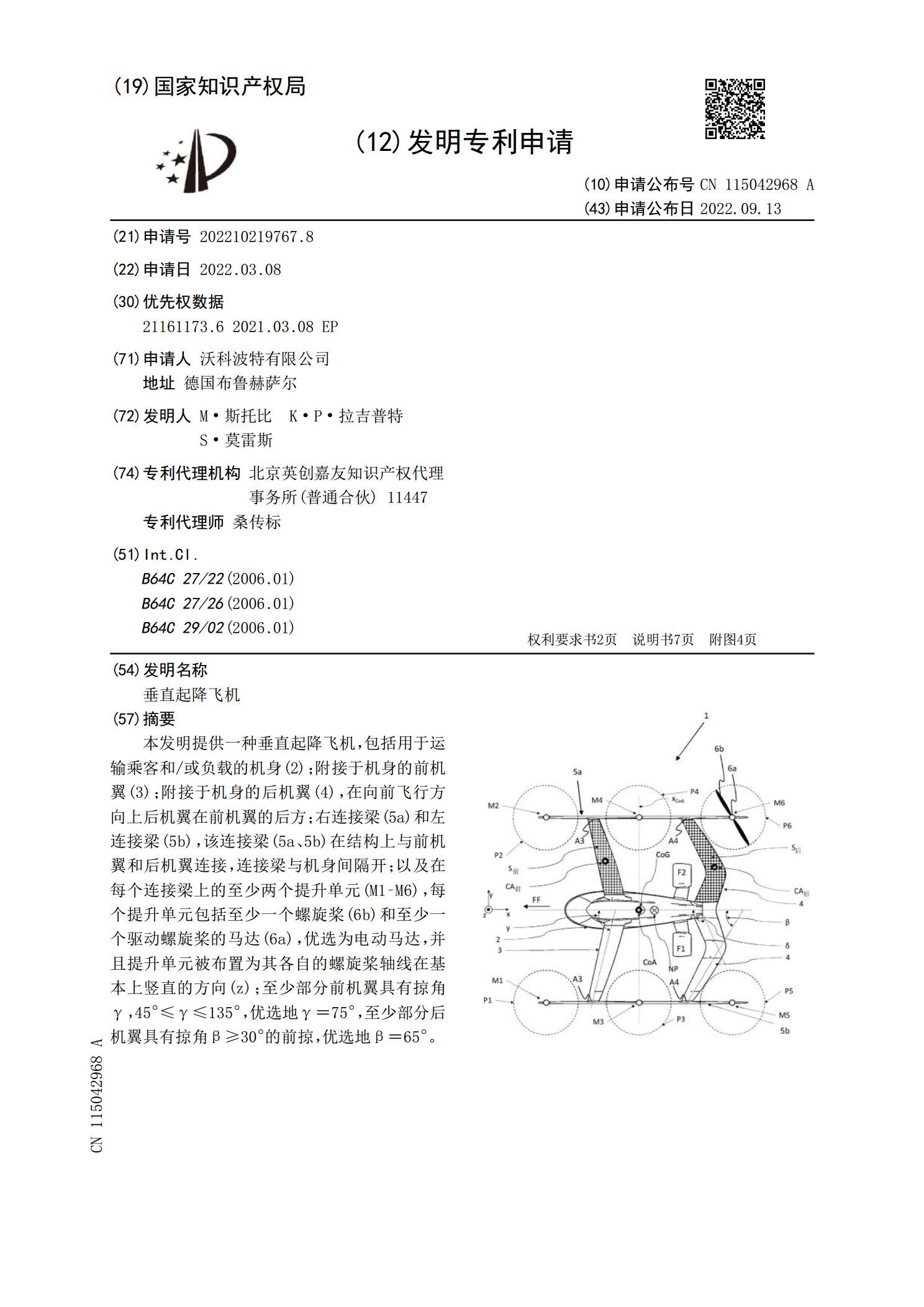
本发明提供一种垂直起降飞机,包括用于运输乘客和/或负载的机身(2);附接于机身的前机翼(3);附接于机身的后机翼(4),在向前飞行方向上后机翼在前机翼的后方;右连接梁(5a)和左连接梁(5b),该连接梁(5a、5b)在结构上与前机翼和后机翼连接,连接梁与机身间隔开;以及在每个连接梁上的至少两个提升单元(M1‑M6),每个提升单元包括至少一个螺旋桨(6b)和至少一个驱动螺旋桨的马达(6a),优选为电动马达,并且提升单元被布置为其各自的螺旋桨轴线在基本上竖直的方向(z);至少部分前机翼具有掠角γ,45°≤γ≤
一种水上垂直起降飞机.pdf
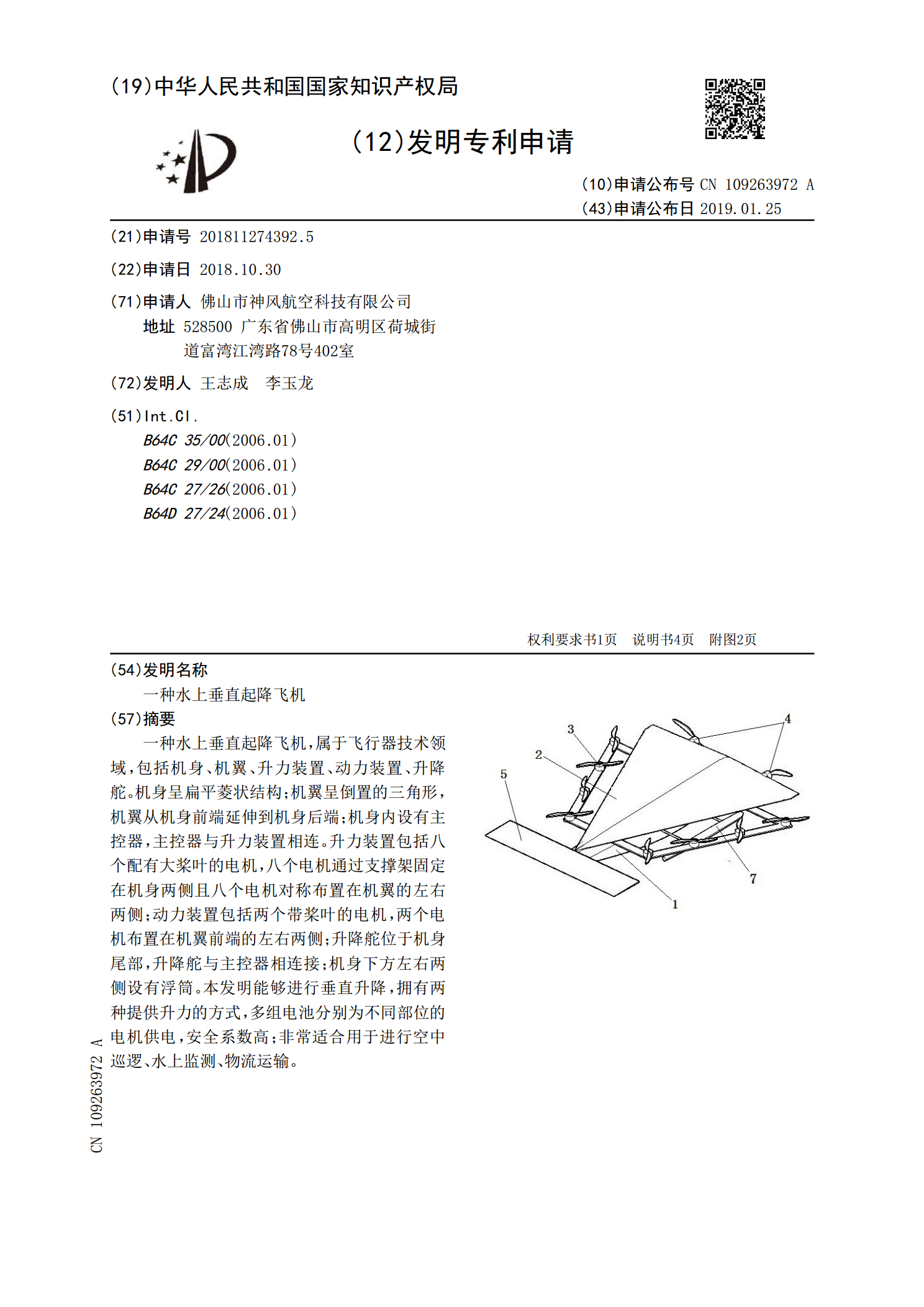
一种水上垂直起降飞机,属于飞行器技术领域,包括机身、机翼、升力装置、动力装置、升降舵。机身呈扁平菱状结构;机翼呈倒置的三角形,机翼从机身前端延伸到机身后端;机身内设有主控器,主控器与升力装置相连。升力装置包括八个配有大桨叶的电机,八个电机通过支撑架固定在机身两侧且八个电机对称布置在机翼的左右两侧;动力装置包括两个带桨叶的电机,两个电机布置在机翼前端的左右两侧;升降舵位于机身尾部,升降舵与主控器相连接;机身下方左右两侧设有浮筒。本发明能够进行垂直升降,拥有两种提供升力的方式,多组电池分别为不同部位的电机供电