
FANUC系统报警信息诠释.doc

觅松****哥哥


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共83页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

FANUC系统报警信息诠释.doc
故障代码解释及应对措施1)ﻩSRVO–001SVAL1OperatorpanelE–stop解释:按下在操作员面板或就是操作箱上得紧急停止按钮。如果SYST-067(面板HSSB断开连接)警报也同时发生,或就是如果在面板上LED指示灯(绿色)关闭不发光,主板(JRS15)与面板(JRS15)通讯异常。主板与面板电路板之间得电缆连接可能松动。或者,电缆,面板电路板或就是主板可能有故障。注意:如果LED指示灯就是关闭不发光得,下面得警报也会产生。SRVO–001OperatorpanelE–stop、SRVO

FANUC系统报警信息诠释.doc
故障代码解释及应对措施1)ﻩSRVO–001SVAL1OperatorpanelE–stop解释:按下在操作员面板或就是操作箱上得紧急停止按钮。如果SYST-067(面板HSSB断开连接)警报也同时发生,或就是如果在面板上LED指示灯(绿色)关闭不发光,主板(JRS15)与面板(JRS15)通讯异常。主板与面板电路板之间得电缆连接可能松动。或者,电缆,面板电路板或就是主板可能有故障。注意:如果LED指示灯就是关闭不发光得,下面得警报也会产生。SRVO–001OperatorpanelE–stop、SRVO

FANUC系统报警信息诠释.doc
故障代码解释及应对措施1)ﻩSRVO–001SVAL1OperatorpanelE–stop解释:按下在操作员面板或就是操作箱上得紧急停止按钮。如果SYST-067(面板HSSB断开连接)警报也同时发生,或就是如果在面板上LED指示灯(绿色)关闭不发光,主板(JRS15)与面板(JRS15)通讯异常。主板与面板电路板之间得电缆连接可能松动。或者,电缆,面板电路板或就是主板可能有故障。注意:如果LED指示灯就是关闭不发光得,下面得警报也会产生。SRVO–001OperatorpanelE–stop、SRVO

FANUC报警信息代码.doc
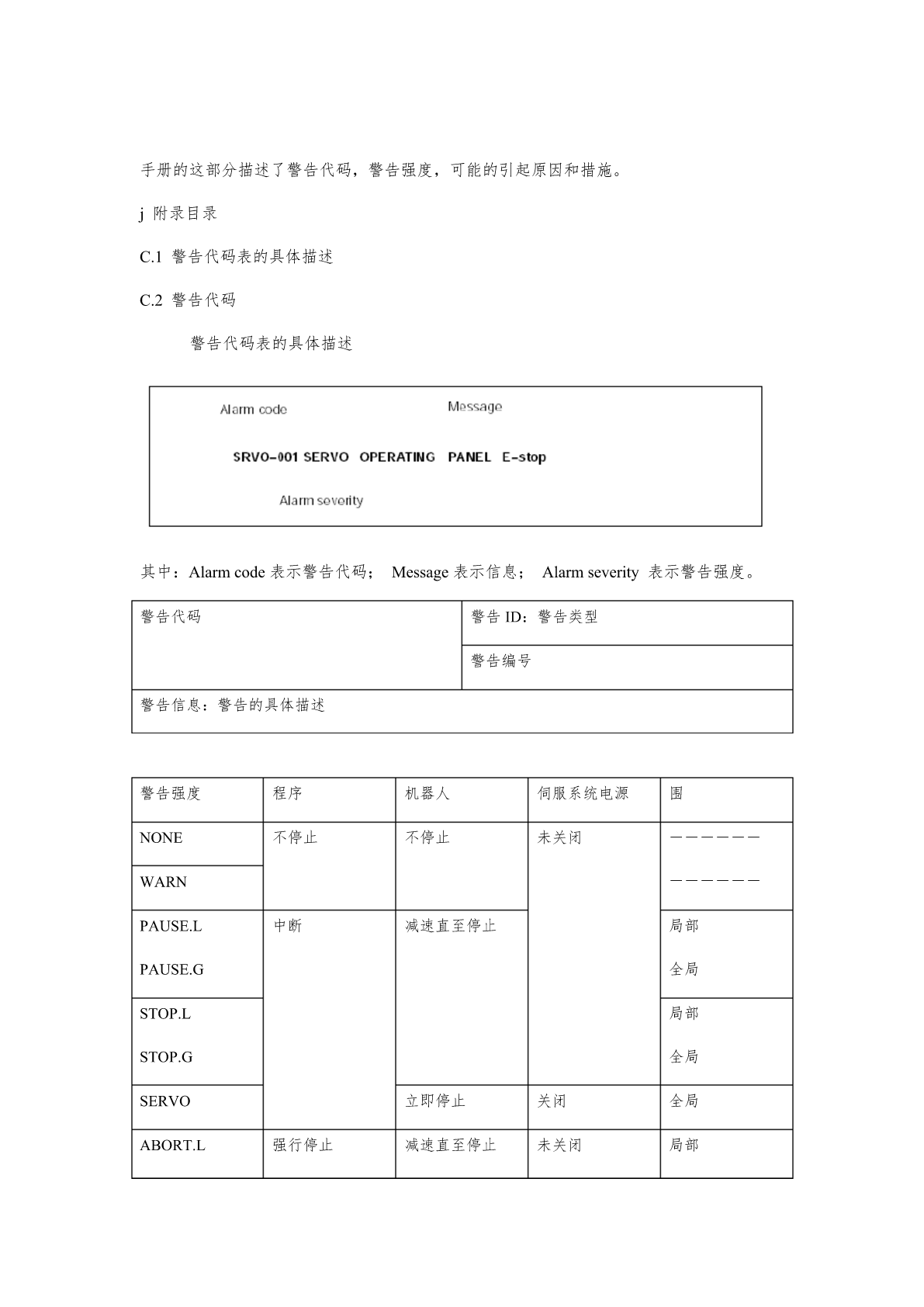
............C.警告代码手册的这部分描述了警告代码,警告强度,可能的引起原因和措施。j附录目录C.1警告代码表的具体描述C.2警告代码C.1警告代码表的具体描述其中:Alarmcode表示警告代码;Message表示信息;Alarmseverity表示警告强度。警告代码警告ID:警告类型警告编号警告信息:警告的具体描述警告强度程序机器人伺服系统电源范围NONE不停止不停止未关闭――――――――――――WARNPAUSE.LPAUSE.G中断减速直至停止局部全局STOP.LSTOP.G局部全局S
FANUC报警信息代码.pdf
手册的这部分描述了警告代码,警告强度,可能的引起原因和措施。j附录目录C.1警告代码表的具体描述C.2警告代码警告代码表的具体描述其中:Alarmcode表示警告代码;Message表示信息;Alarmseverity表示警告强度。警告代码警告ID:警告类型警告编号警告信息:警告的具体描述警告强度程序机器人伺服系统电源围NONE不停止不停止未关闭――――――WARN――――――PAUSE.L中断减速直至停止局部PAUSE.G全局STOP.L局部STOP.G全局SERVO立即停止关闭全局ABORT.L强行停