
一种运动物体三维轮廓的结构光测量方法.pdf

灵波****ng

1/10
2/10
3/10
4/10

5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种运动物体三维轮廓的结构光测量方法.pdf
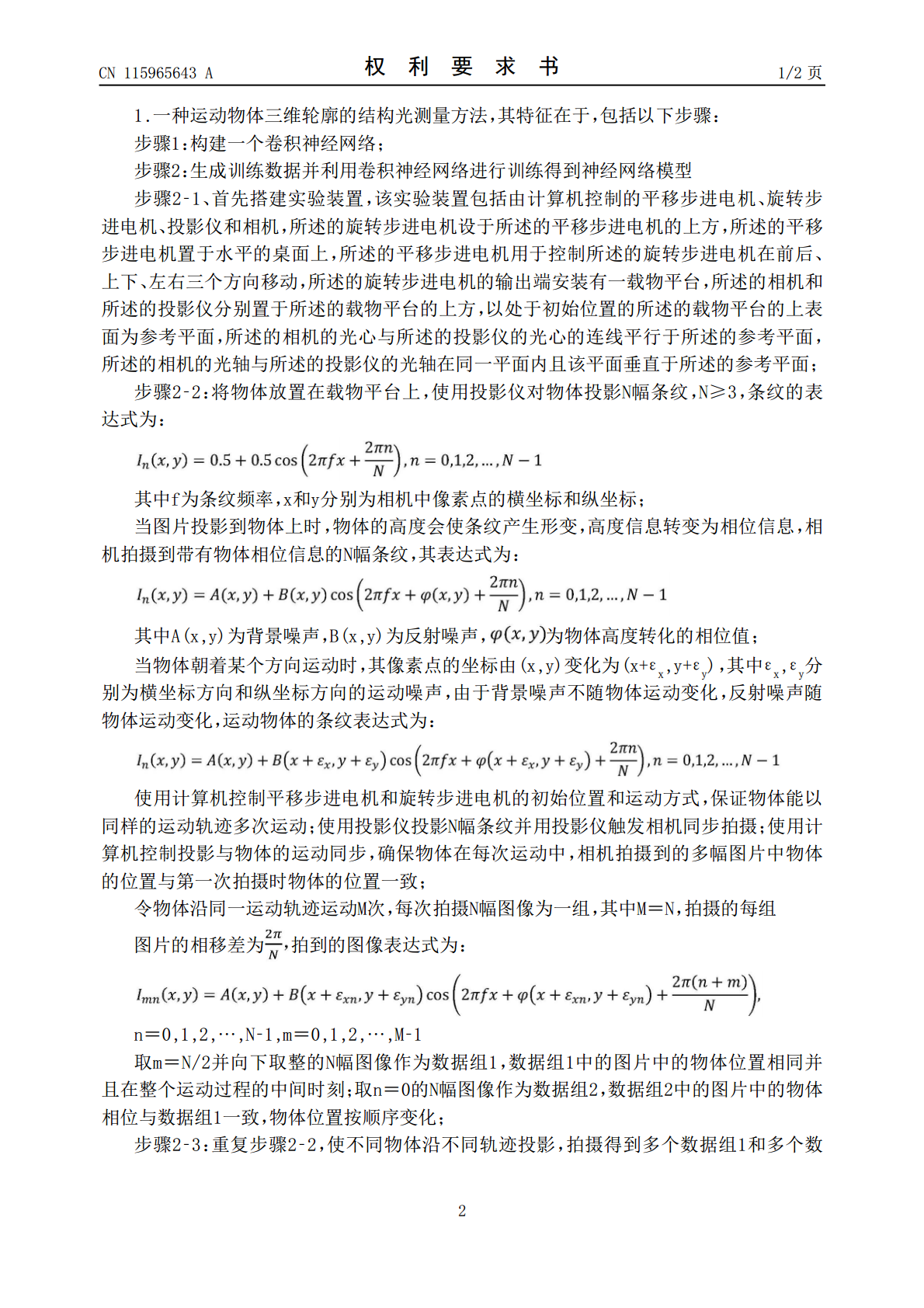
本发明公开了一种运动物体三维轮廓的结构光测量方法,包括构建一个卷积神经网络、生成训练数据并利用卷积神经网络进行训练得到神经网络模型、由训练后的相移图对待测运动物体进行三维重建等步骤。本发明测量方法将神经网络和结构光三维投影结合起来,通过神经网络训练消除运动误差,简化了运动误差繁杂的迭代计算,可以实现物体处于匀速运动、变速运动、旋转运动等各种状态下的实时运动时三维轮廓的测量,快速、高效地获得运动物体的精确三维信息;本发明测量方法利用拍摄的每一幅图像,采集了每个运动位置及其前后的图片的信息,信息利用率高;本发

结构光对物体的轮廓的三维测量.ppt
结构光对物体的轮廓的三维测量研究背景论文的作用和目的实验过程和结果得到参考面和被测物体表面条纹图后,经过图像处理,利用FTP方法计算被测物体和参考面的相位差,最后进行相位展开,得到展开后的相位差分布如下图,图(a)为折叠相位图(b)为相位展开后的结构折叠相位和展开相位的三维分布如下图利用系统标定的方法对系统进行标定,根据标定的结果可以由展开相位计算出物体的三维数据,然后利用Matlab软件得到被测物体表面的三维轮廓如下图结论

一种基于k均值颜色聚类的物体表面三维轮廓的结构光视觉测量方法.pdf
本发明的目的在于提供一种基于k均值颜色聚类的物体表面三维轮廓的结构光视觉测量方法,在RGB空间确定每种投影颜色的空间直线,计算每个像素点到空间颜色直线的欧式距离,选择其中距离的最小值,对应的颜色标号就是当前像素点最接近的颜色值。然后利用具有相同标号的像素点,自适应调整参数,拟合出新的空间颜色直线。利用k均值聚类算法,进行反复迭代,直到每个像素点的颜色值趋于稳定。颜色分类后,获得解码的序列,进而确定每个匹配点的位置,生成匹配点坐标矩阵。利用三角测量法得到深度信息,实现物体三维表面的重构。本发明提高了颜色分类
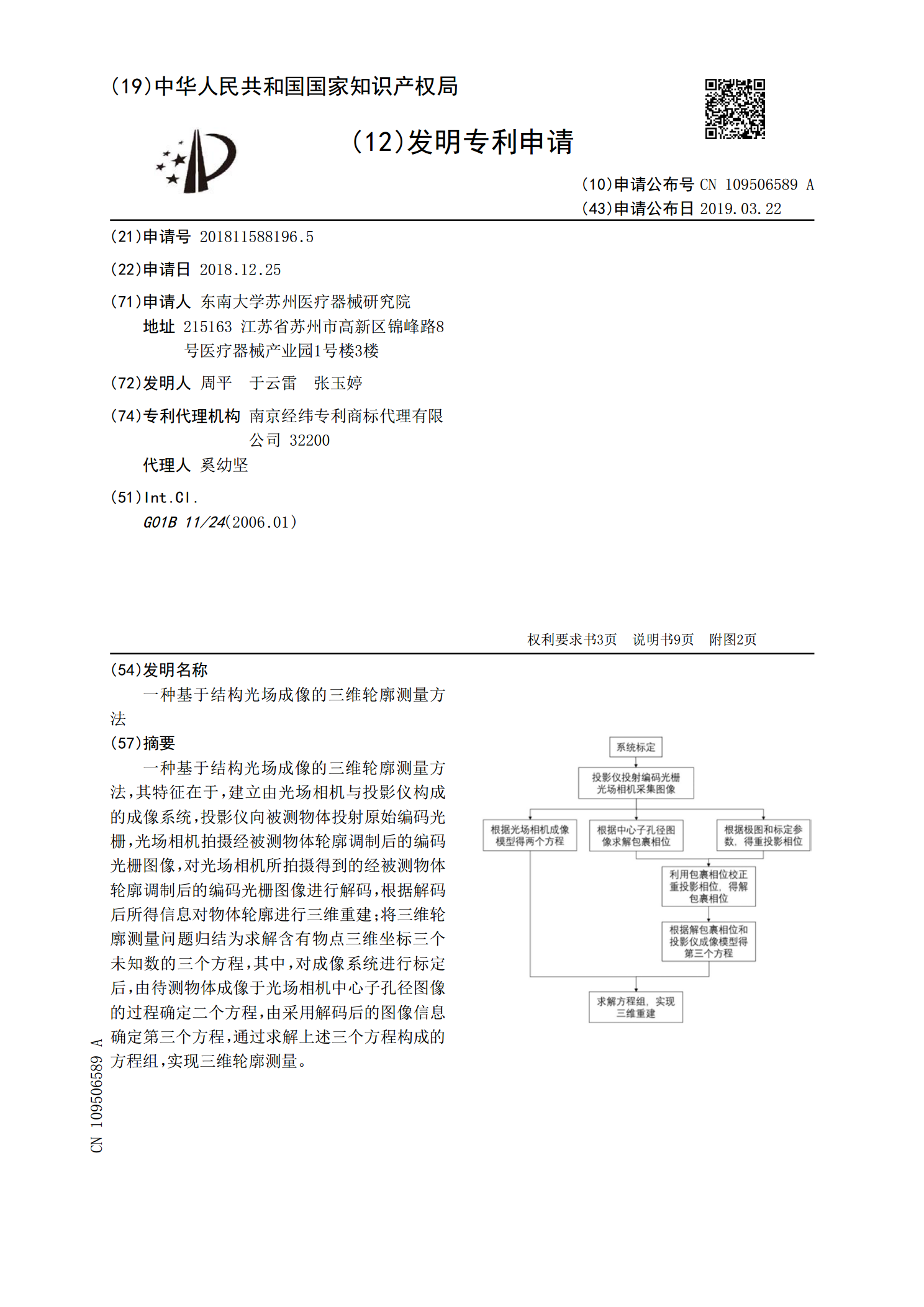
一种基于结构光场成像的三维轮廓测量方法.pdf
一种基于结构光场成像的三维轮廓测量方法,其特征在于,建立由光场相机与投影仪构成的成像系统,投影仪向被测物体投射原始编码光栅,光场相机拍摄经被测物体轮廓调制后的编码光栅图像,对光场相机所拍摄得到的经被测物体轮廓调制后的编码光栅图像进行解码,根据解码后所得信息对物体轮廓进行三维重建;将三维轮廓测量问题归结为求解含有物点三维坐标三个未知数的三个方程,其中,对成像系统进行标定后,由待测物体成像于光场相机中心子孔径图像的过程确定二个方程,由采用解码后的图像信息确定第三个方程,通过求解上述三个方程构成的方程组,实现三

彩色物体三维轮廓测量方法.pdf
本发明属于光学测量技术领域,具体涉及一种彩色物体三维轮廓测量方法。本发明首先利用光度计测量出3CCD相机的三通道耦合矩阵,消除物理器件对测量过程的影响,相比于利用投影红、绿、蓝图像至白纸上计算耦合矩阵具有更高的精度;对于彩色物体表面反射率的求取,该方法实质上相当于在物体每一点都投影了三原色,利用互补关系,通过叠加互补色,求取的反射率矩阵K抵消了干扰。较之投射均匀白光求取的反射率K,投影互补彩色条纹的方法能起到更好的结构光条纹补偿效果,补偿后的图像具有更好的正弦性。本方法只需投影四副图像至彩色物体表面就可以