
彩色物体三维轮廓测量方法.pdf

猫巷****熙柔

1/9

2/9

3/9

4/9

5/9

6/9
7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

彩色物体三维轮廓测量方法.pdf
本发明属于光学测量技术领域,具体涉及一种彩色物体三维轮廓测量方法。本发明首先利用光度计测量出3CCD相机的三通道耦合矩阵,消除物理器件对测量过程的影响,相比于利用投影红、绿、蓝图像至白纸上计算耦合矩阵具有更高的精度;对于彩色物体表面反射率的求取,该方法实质上相当于在物体每一点都投影了三原色,利用互补关系,通过叠加互补色,求取的反射率矩阵K抵消了干扰。较之投射均匀白光求取的反射率K,投影互补彩色条纹的方法能起到更好的结构光条纹补偿效果,补偿后的图像具有更好的正弦性。本方法只需投影四副图像至彩色物体表面就可以
动态物体的三维轮廓实时测量方法.pdf
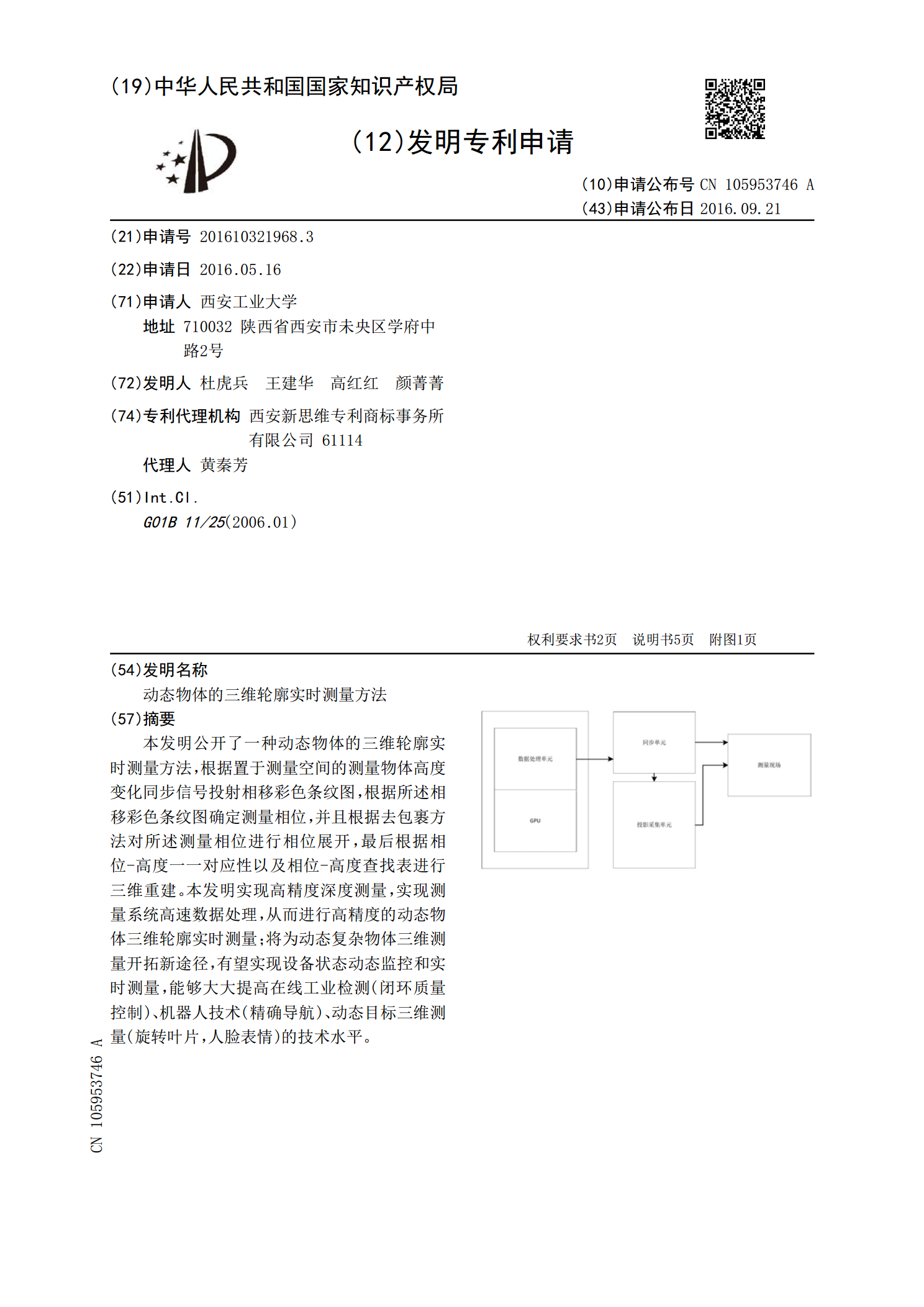
本发明公开了一种动态物体的三维轮廓实时测量方法,根据置于测量空间的测量物体高度变化同步信号投射相移彩色条纹图,根据所述相移彩色条纹图确定测量相位,并且根据去包裹方法对所述测量相位进行相位展开,最后根据相位‑高度一一对应性以及相位‑高度查找表进行三维重建。本发明实现高精度深度测量,实现测量系统高速数据处理,从而进行高精度的动态物体三维轮廓实时测量;将为动态复杂物体三维测量开拓新途径,有望实现设备状态动态监控和实时测量,能够大大提高在线工业检测(闭环质量控制)、机器人技术(精确导航)、动态目标三维测量(旋转叶

基于RGB彩色模型的三维轮廓测量方法研究综述报告.docx
基于RGB彩色模型的三维轮廓测量方法研究综述报告摘要:三维轮廓测量技术因其高精度、高效率和非接触测量等优点而在工业制造、生物医学和文化遗产保护等领域中得到广泛应用,其中基于RGB彩色模型的三维轮廓测量方法由于无需增加额外设备和复杂算法,成为了研究热点。本文通过对目前国内外研究进展的综述,对基于RGB彩色模型的三维轮廓测量方法的原理、算法和应用进行了深入探讨,并针对目前存在的问题,提出了未来的发展方向与研究重点。1.引言三维轮廓测量是工业制造、生物医学、文化遗产保护等领域中的重要技术,由于其能够获取目标物体

基于RGB彩色模型的三维轮廓测量方法研究综述报告.pptx
添加副标题目录PART01PART02RGB彩色模型概述三维轮廓测量的意义综述的目的和意义PART03RGB彩色模型在轮廓测量中的应用RGB颜色信息与轮廓特征的关联性RGB颜色信息的处理方法PART04基于颜色的三维重建方法基于深度学习的三维轮廓测量方法基于光学的三维轮廓测量方法基于结构光的三维轮廓测量方法PART05基于颜色的三维重建方法的优缺点分析基于深度学习的三维轮廓测量方法的优缺点分析基于光学的三维轮廓测量方法的优缺点分析基于结构光的三维轮廓测量方法的优缺点分析PART06在工业检测领域的应用场景

基于彩色格雷编码的物体三维轮廓重构的中期报告.docx
基于彩色格雷编码的物体三维轮廓重构的中期报告1.研究背景在现代计算机视觉领域中,物体三维轮廓重构是一个重要的问题。其目标是通过从不同角度拍摄的图像中提取的物体轮廓信息来重构物体的三维模型。传统的方法通常涉及复杂的图像处理和计算几何技术。但是,随着彩色相机和深度传感器的普及,近年来基于深度学习的物体轮廓重构方法已经得到广泛研究。本文旨在研究基于彩色格雷编码的物体三维轮廓重构方法。相较于传统的物体轮廓提取方法,使用格雷编码可以在保证轮廓精度的同时,减少对光照和颜色的依赖。同时,该方法还可以应用于复杂的场景中,