
一种纸脚抓取机械手装置.pdf

雨巷****可歆

1/6

2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种纸脚抓取机械手装置.pdf
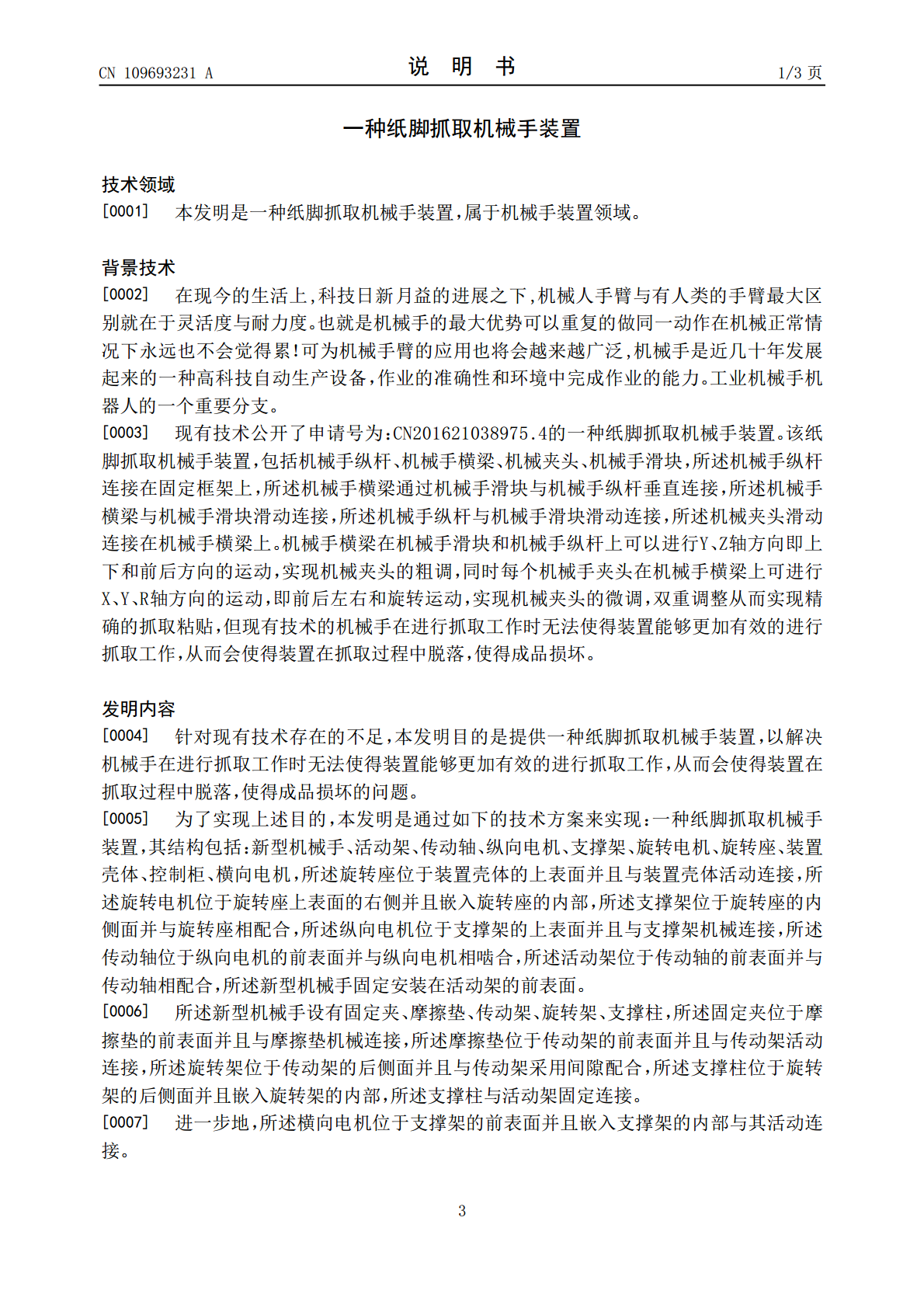
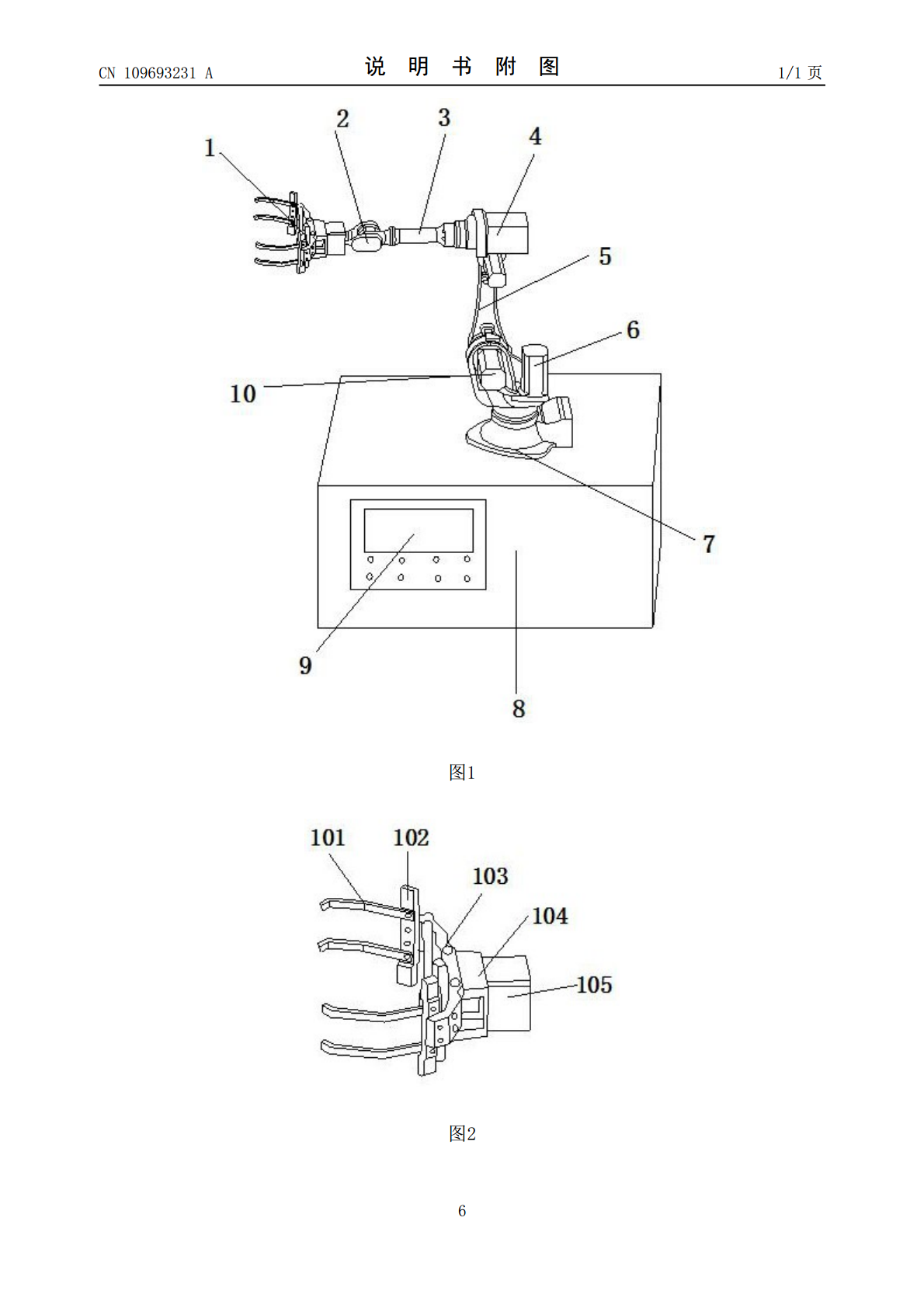
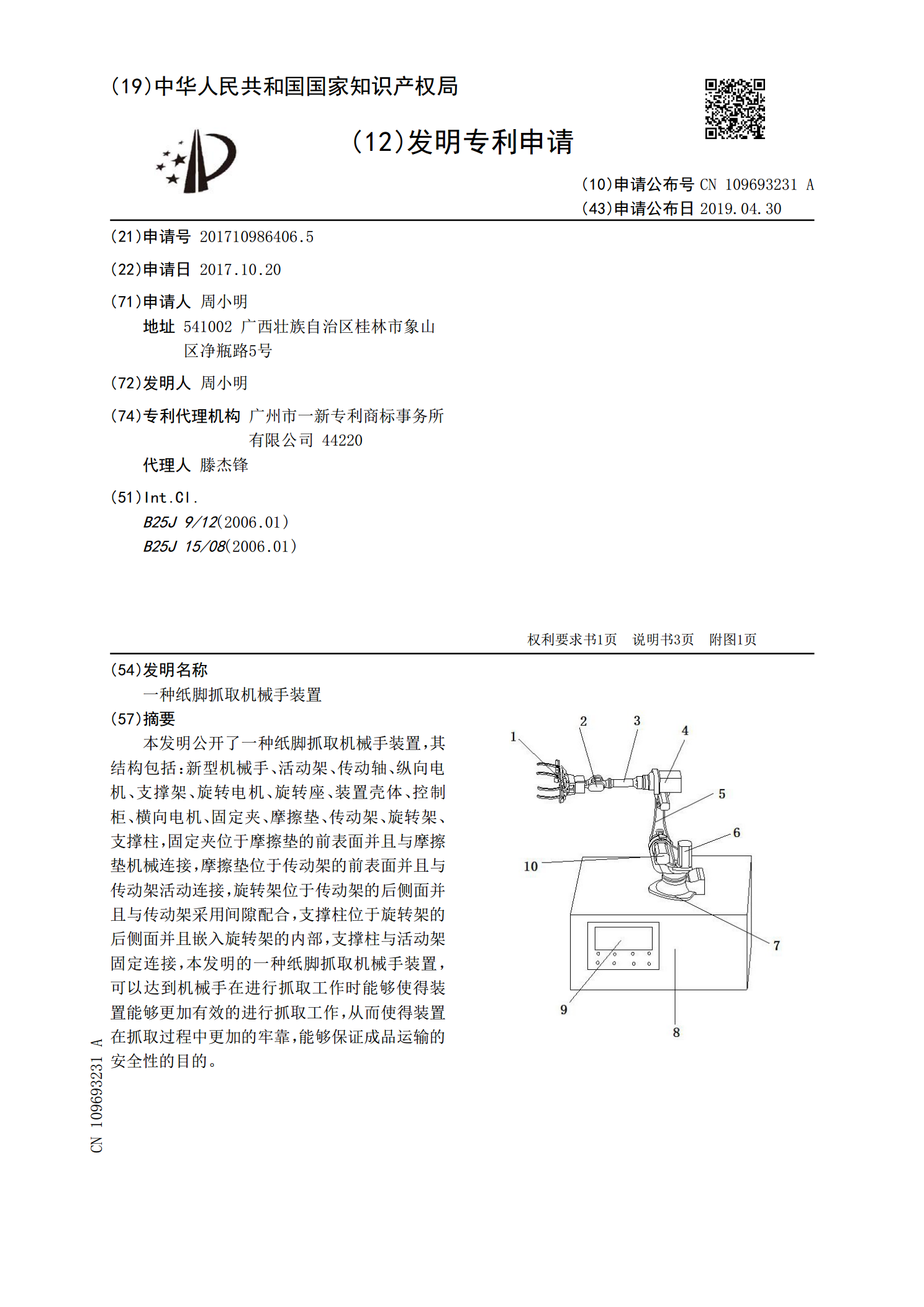
本发明公开了一种纸脚抓取机械手装置,其结构包括:新型机械手、活动架、传动轴、纵向电机、支撑架、旋转电机、旋转座、装置壳体、控制柜、横向电机、固定夹、摩擦垫、传动架、旋转架、支撑柱,固定夹位于摩擦垫的前表面并且与摩擦垫机械连接,摩擦垫位于传动架的前表面并且与传动架活动连接,旋转架位于传动架的后侧面并且与传动架采用间隙配合,支撑柱位于旋转架的后侧面并且嵌入旋转架的内部,支撑柱与活动架固定连接,本发明的一种纸脚抓取机械手装置,可以达到机械手在进行抓取工作时能够使得装置能够更加有效的进行抓取工作,从而使得装置在抓

一种纸脚抓取机械手装置.pdf
本发明公开了一种纸脚抓取机械手装置,其结构包括底座、平台、螺旋钉、机械手纵杆、滚轮、滑块、精准装置、固定杆、转轴、夹头、机械臂,所述夹头底部为圆柱体结构,前端为长方体结构,所述夹头与转轴采用间隙配合方式活动连接,本发明设有精准装置,用机械臂和滚轮相配合在机械手纵杆上进行工作调节,再通过滑块通过精准装置来控制固定杆,然后用转轴和夹头相配合进行抓取进行上下料,在工作的时候,用显示屏来进行观察,当上下料的位置没有对准的时候,用调节器和控制器来进行微调,减少误差,通过上下料时的精准操作。
一种物流搬运机械手的抓取装置.pdf
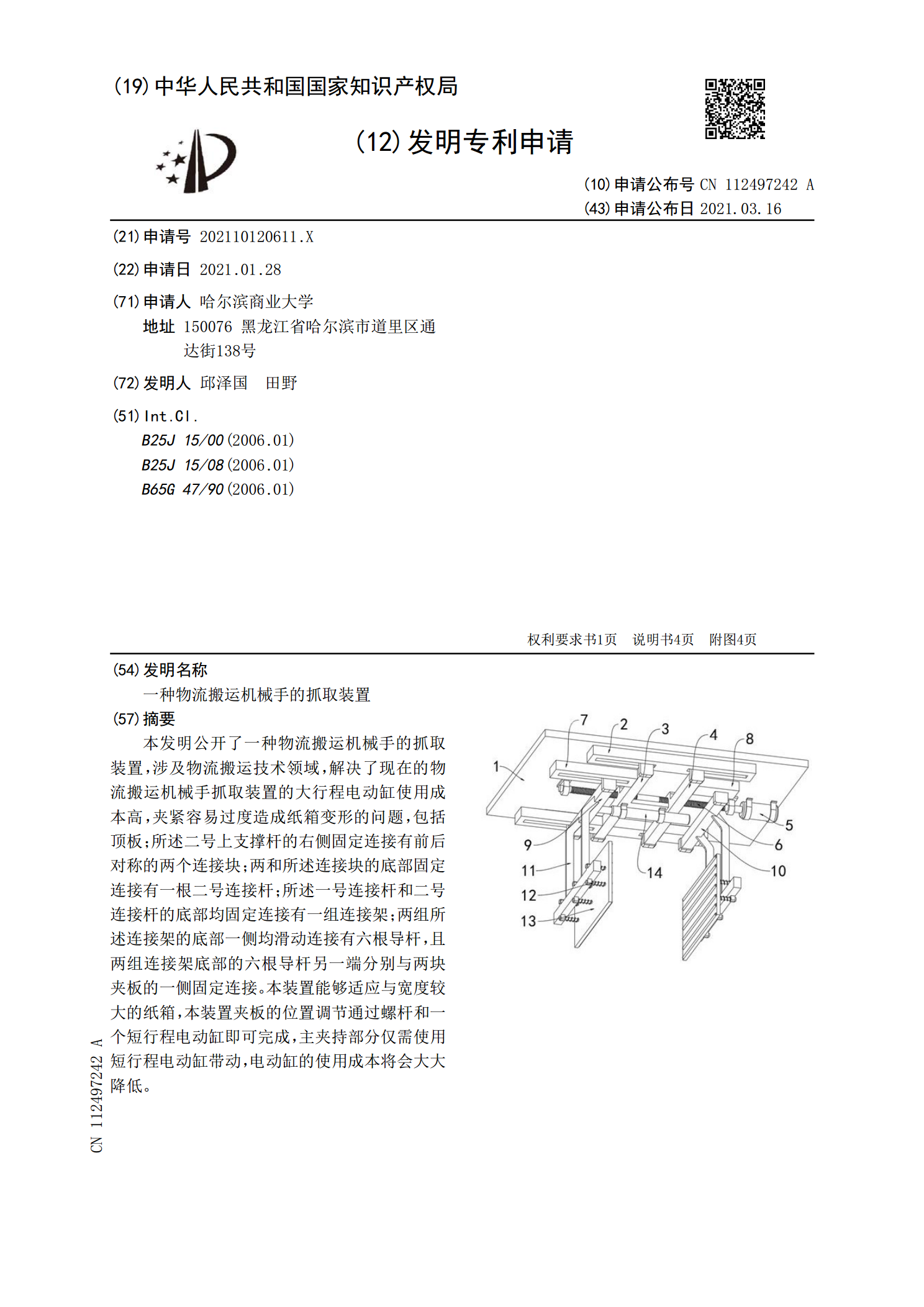
本发明公开了一种物流搬运机械手的抓取装置,涉及物流搬运技术领域,解决了现在的物流搬运机械手抓取装置的大行程电动缸使用成本高,夹紧容易过度造成纸箱变形的问题,包括顶板;所述二号上支撑杆的右侧固定连接有前后对称的两个连接块;两和所述连接块的底部固定连接有一根二号连接杆;所述一号连接杆和二号连接杆的底部均固定连接有一组连接架;两组所述连接架的底部一侧均滑动连接有六根导杆,且两组连接架底部的六根导杆另一端分别与两块夹板的一侧固定连接。本装置能够适应与宽度较大的纸箱,本装置夹板的位置调节通过螺杆和一个短行程电动缸即
一种多排抓取料机械手装置.pdf
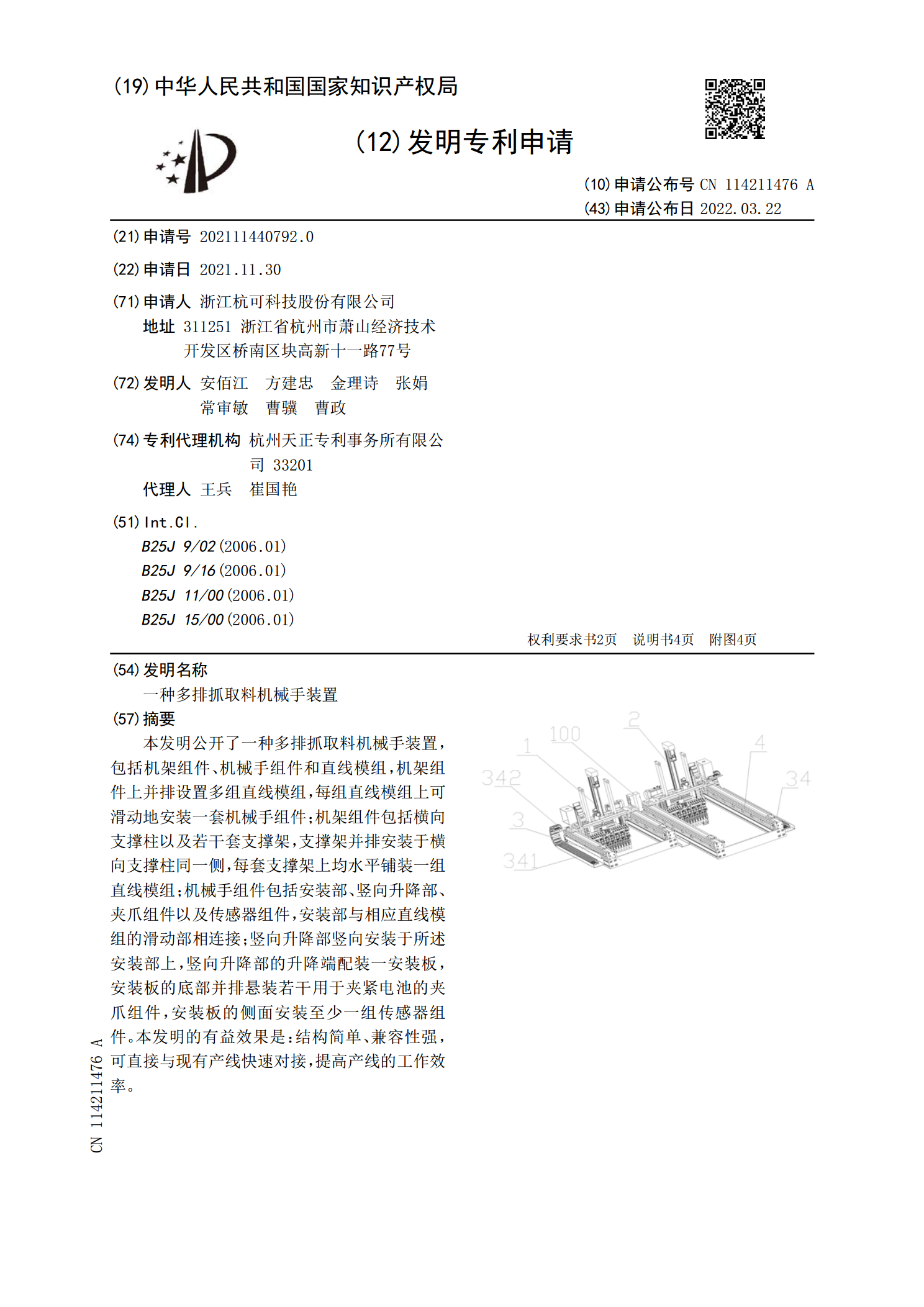
本发明公开了一种多排抓取料机械手装置,包括机架组件、机械手组件和直线模组,机架组件上并排设置多组直线模组,每组直线模组上可滑动地安装一套机械手组件;机架组件包括横向支撑柱以及若干套支撑架,支撑架并排安装于横向支撑柱同一侧,每套支撑架上均水平铺装一组直线模组;机械手组件包括安装部、竖向升降部、夹爪组件以及传感器组件,安装部与相应直线模组的滑动部相连接;竖向升降部竖向安装于所述安装部上,竖向升降部的升降端配装一安装板,安装板的底部并排悬装若干用于夹紧电池的夹爪组件,安装板的侧面安装至少一组传感器组件。本发明的
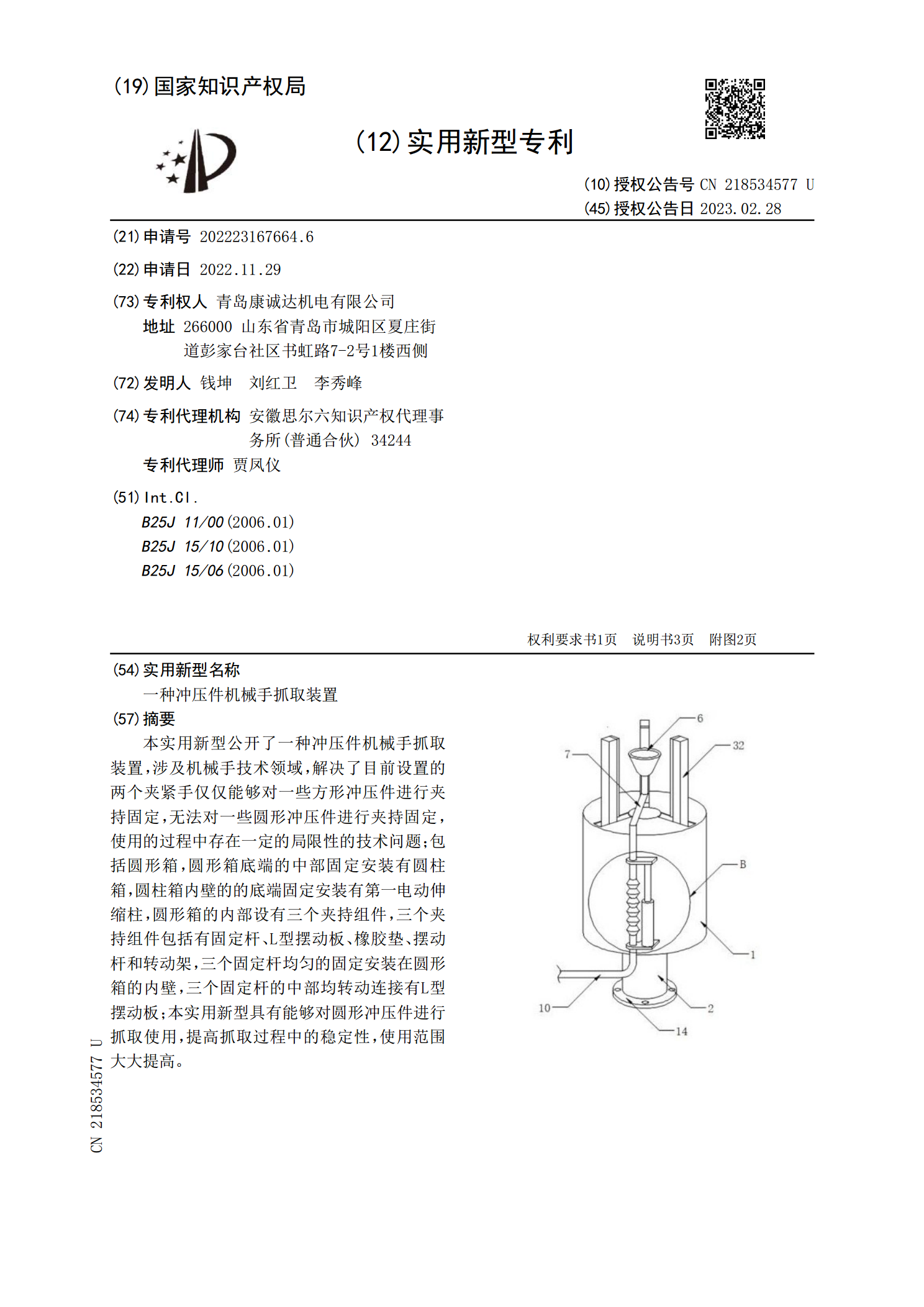
一种冲压件机械手抓取装置.pdf
本实用新型公开了一种冲压件机械手抓取装置,涉及机械手技术领域,解决了目前设置的两个夹紧手仅仅能够对一些方形冲压件进行夹持固定,无法对一些圆形冲压件进行夹持固定,使用的过程中存在一定的局限性的技术问题;包括圆形箱,圆形箱底端的中部固定安装有圆柱箱,圆柱箱内壁的的底端固定安装有第一电动伸缩柱,圆形箱的内部设有三个夹持组件,三个夹持组件包括有固定杆、L型摆动板、橡胶垫、摆动杆和转动架,三个固定杆均匀的固定安装在圆形箱的内壁,三个固定杆的中部均转动连接有L型摆动板;本实用新型具有能够对圆形冲压件进行抓取使用,提高