
能够越障的轮椅.pdf

邻家****66

1/10
2/10
3/10
4/10

5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

能够越障的轮椅.pdf
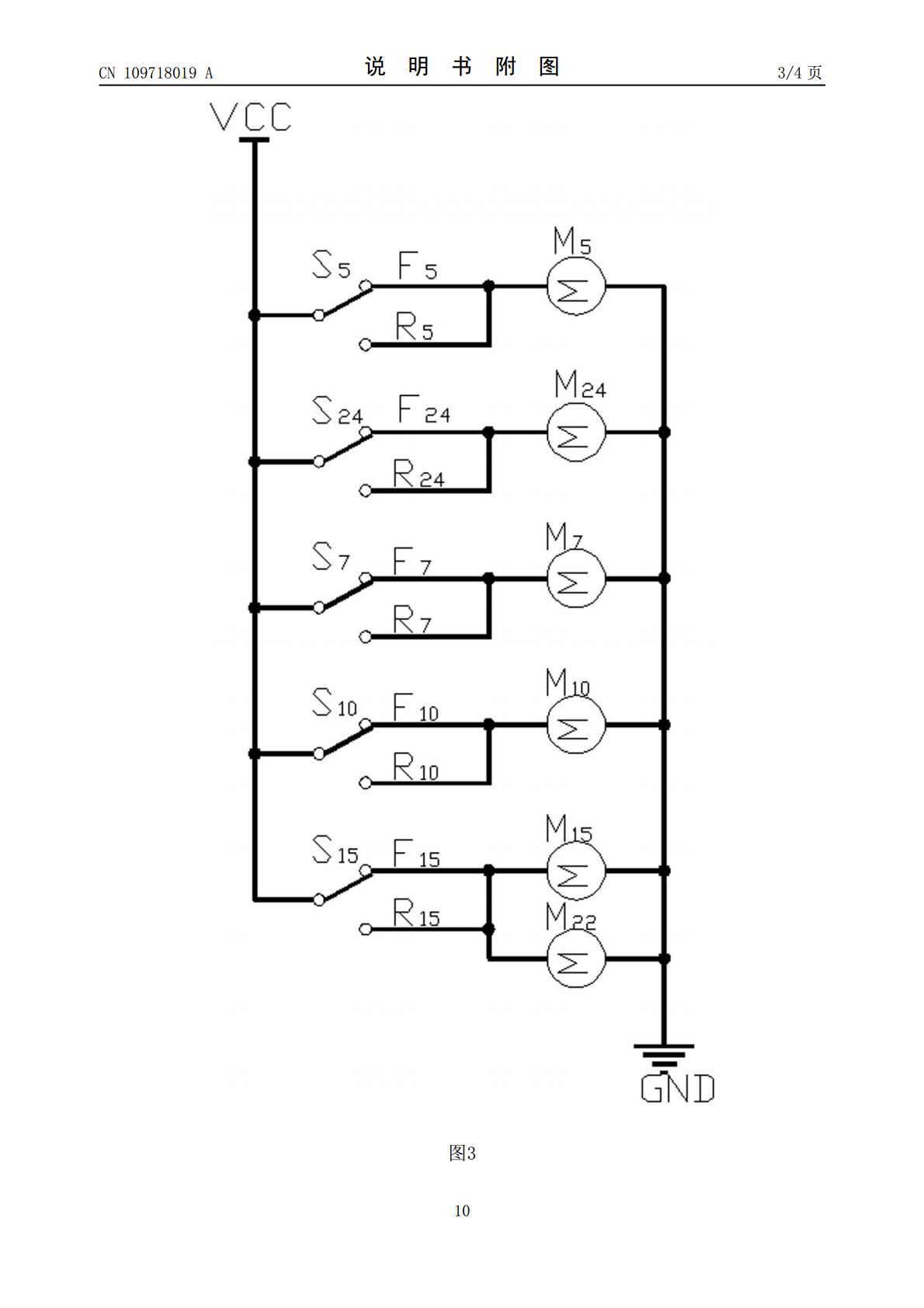
本发明涉及一种能够越障的轮椅,包括有一个椅子主体,椅子主体由靠背、椅座和扶手固定组成,椅座的下方横向固定有主杆,主杆连接有驱动轮摆臂a、驱动轮摆臂d、驱动轮摆臂b和驱动轮摆臂c,前方的驱动摆臂下方固定有驱动轮a和驱动轮b,后方的驱动摆臂下方固定有驱动轮c和驱动轮d,椅座的前后方竖向分别铰接有电动推杆a和电动推杆b,分别铰接在前面的摆臂和后面的摆臂组上,主杆下方还连接有辅助轮支撑架和辅助轮,驱动轮和电动推杆借连接有电池和方向控制器。本发明由四个轮毂电机驱动前进,转向采用差速转向的方式。通过障碍时两组由电动推

越障轮椅.pdf
本发明具体涉及越障轮椅,通过改变轮椅扶手臂内部的结构,来使得扶手具备旋转及伸缩功能。该扶手支撑臂包括伸缩机构和连接机构,所述伸缩机构一端通过连接机构铰接在靠背两侧的靠背支撑板上,并通过连接机构构成伸缩机构沿着铰接端旋转的联动配合,所述伸缩机构包括若干个依次套装且相互之间滑动配合的套筒,最外侧套筒的一端与连接机构的扶手连接罩相连,最内侧套筒的另一端与扶手罩相连,所述套筒内设置有剪叉式连杆机构,所述剪叉式连杆机构一端与扶手罩相连,另一端伸出最外侧套筒并与连接机构中驱动传动机构相连,所述驱动传动机构安装在扶手连
越障轮椅.pdf
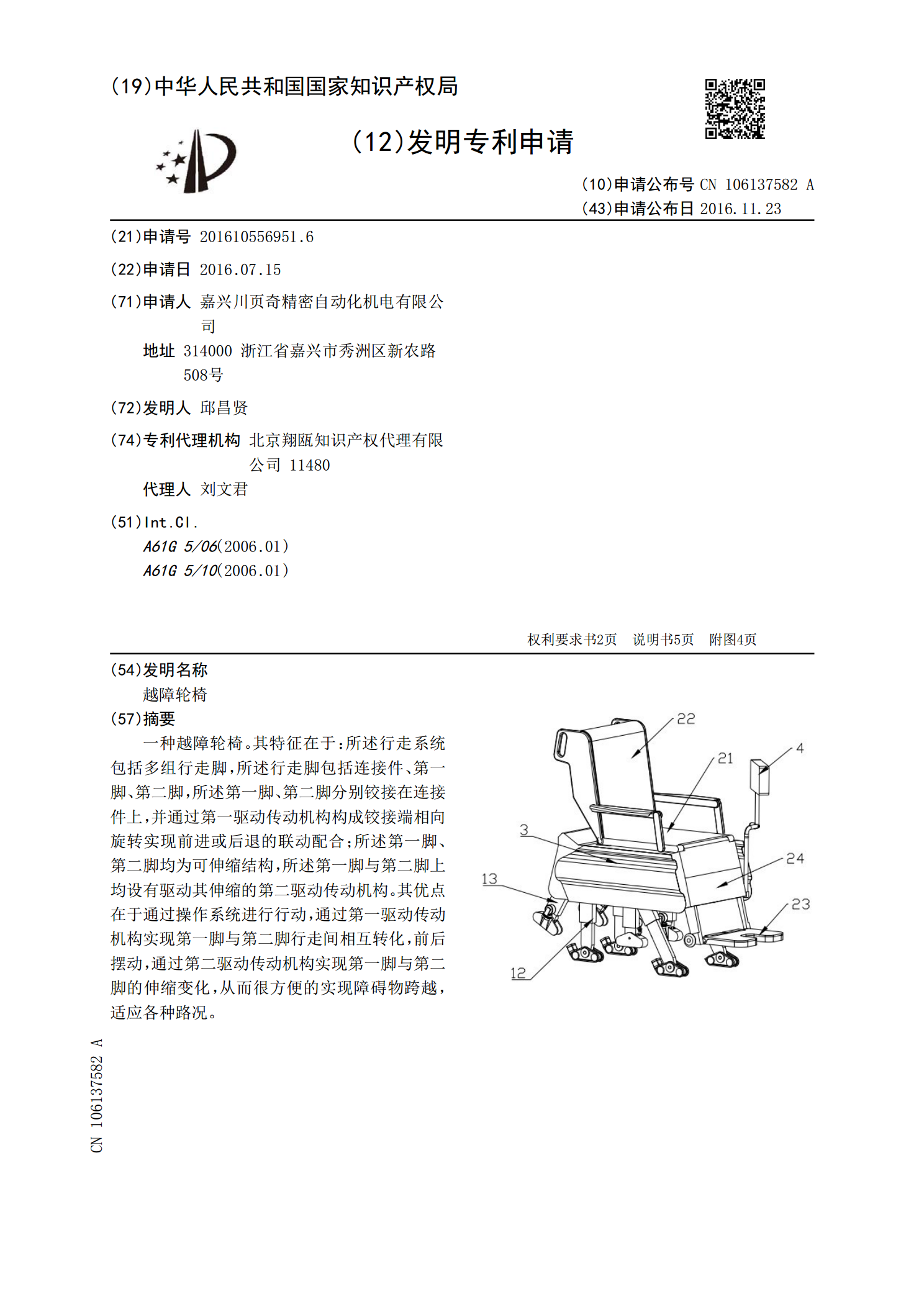
一种越障轮椅。其特征在于:所述行走系统包括多组行走脚,所述行走脚包括连接件、第一脚、第二脚,所述第一脚、第二脚分别铰接在连接件上,并通过第一驱动传动机构构成铰接端相向旋转实现前进或后退的联动配合;所述第一脚、第二脚均为可伸缩结构,所述第一脚与第二脚上均设有驱动其伸缩的第二驱动传动机构。其优点在于通过操作系统进行行动,通过第一驱动传动机构实现第一脚与第二脚行走间相互转化,前后摆动,通过第二驱动传动机构实现第一脚与第二脚的伸缩变化,从而很方便的实现障碍物跨越,适应各种路况。
智能轮椅行进越障装置.pdf
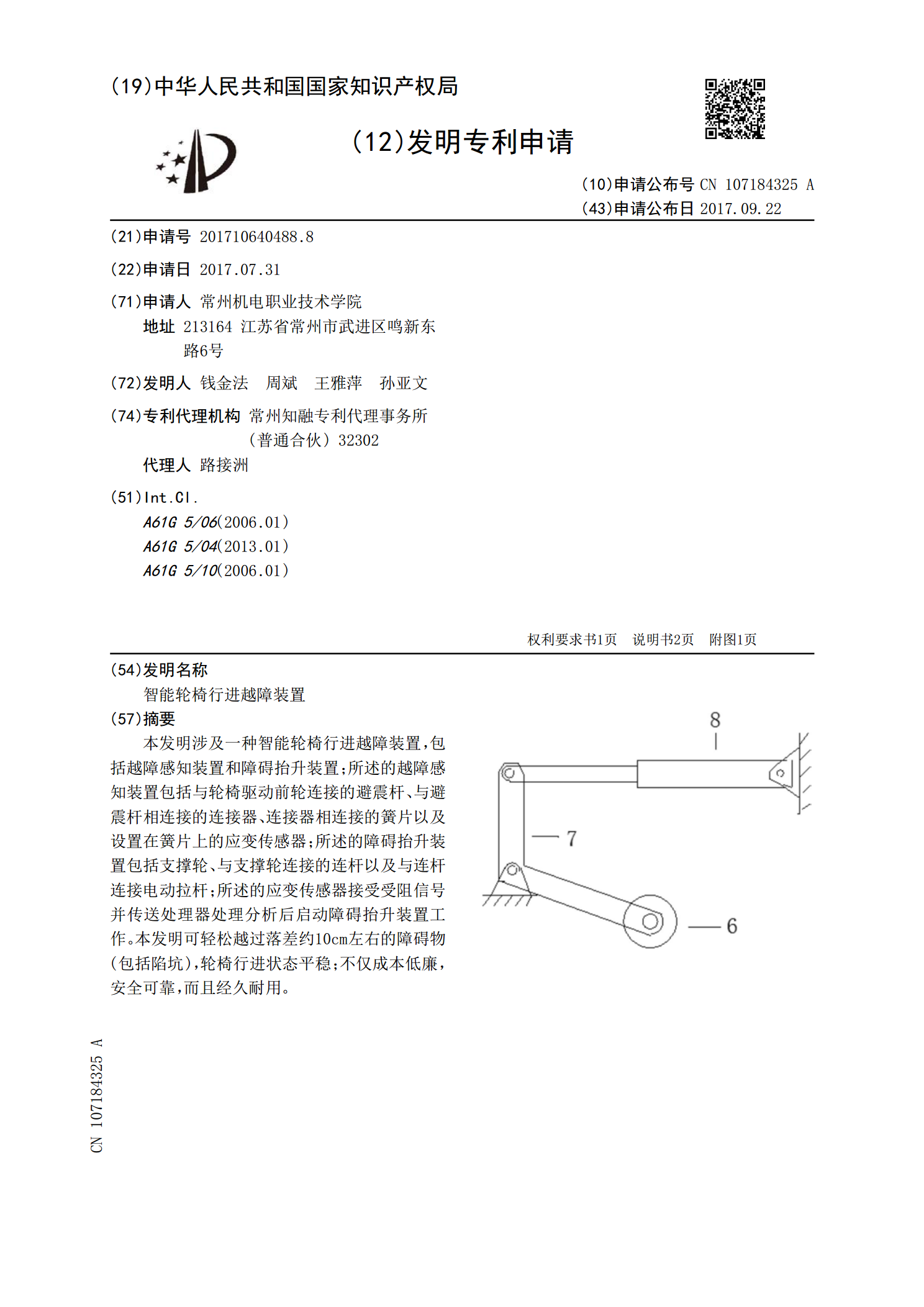
本发明涉及一种智能轮椅行进越障装置,包括越障感知装置和障碍抬升装置;所述的越障感知装置包括与轮椅驱动前轮连接的避震杆、与避震杆相连接的连接器、连接器相连接的簧片以及设置在簧片上的应变传感器;所述的障碍抬升装置包括支撑轮、与支撑轮连接的连杆以及与连杆连接电动拉杆;所述的应变传感器接受受阻信号并传送处理器处理分析后启动障碍抬升装置工作。本发明可轻松越过落差约10cm左右的障碍物(包括陷坑),轮椅行进状态平稳;不仅成本低廉,安全可靠,而且经久耐用。
一种越障轮椅.pdf
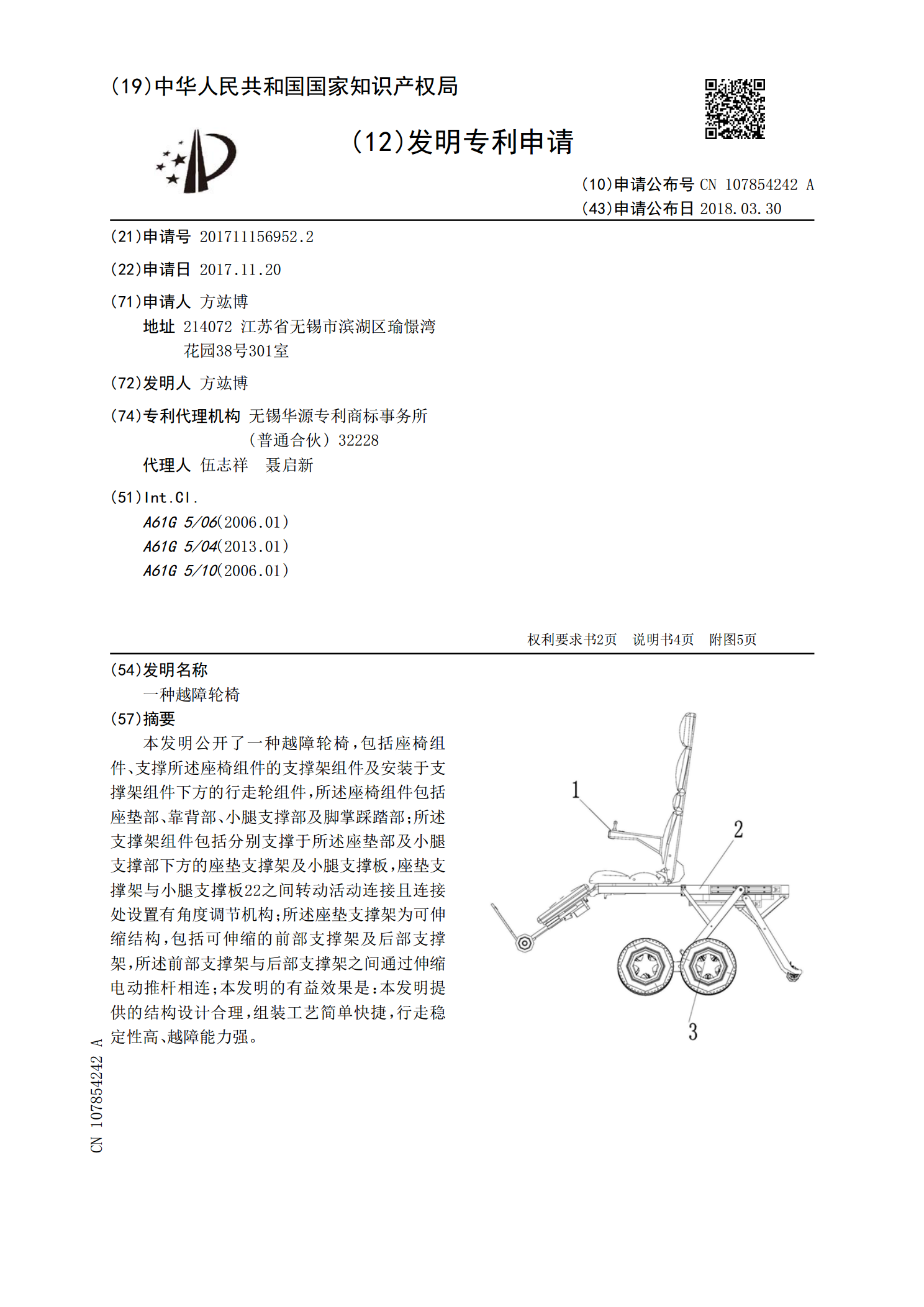
本发明公开了一种越障轮椅,包括座椅组件、支撑所述座椅组件的支撑架组件及安装于支撑架组件下方的行走轮组件,所述座椅组件包括座垫部、靠背部、小腿支撑部及脚掌踩踏部;所述支撑架组件包括分别支撑于所述座垫部及小腿支撑部下方的座垫支撑架及小腿支撑板,座垫支撑架与小腿支撑板22之间转动活动连接且连接处设置有角度调节机构;所述座垫支撑架为可伸缩结构,包括可伸缩的前部支撑架及后部支撑架,所述前部支撑架与后部支撑架之间通过伸缩电动推杆相连;本发明的有益效果是:本发明提供的结构设计合理,组装工艺简单快捷,行走稳定性高、越障能