
一种悬挂式存取车辆装置.pdf

鹏飞****可爱


1/6

2/6
3/6

4/6
5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种悬挂式存取车辆装置.pdf
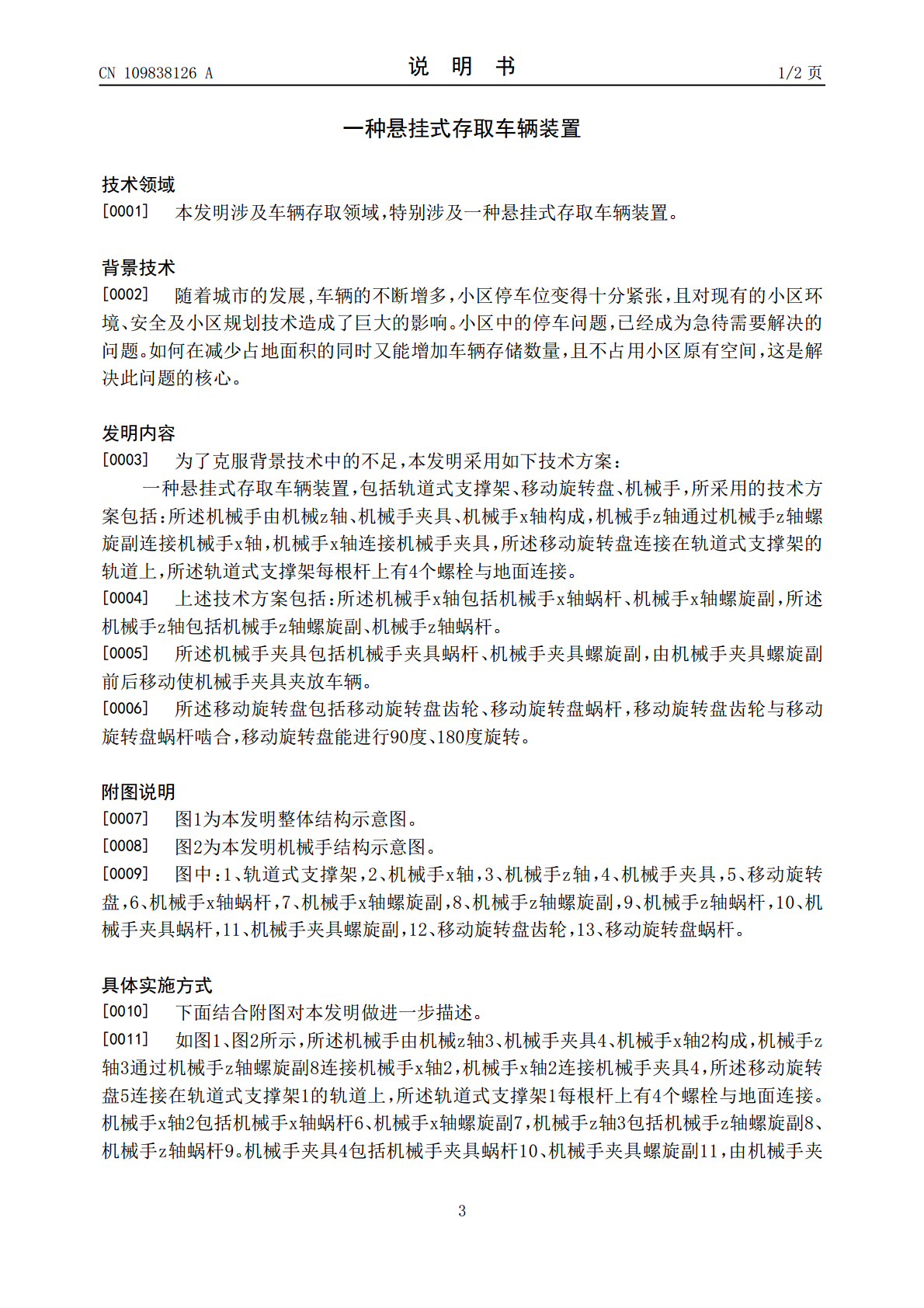
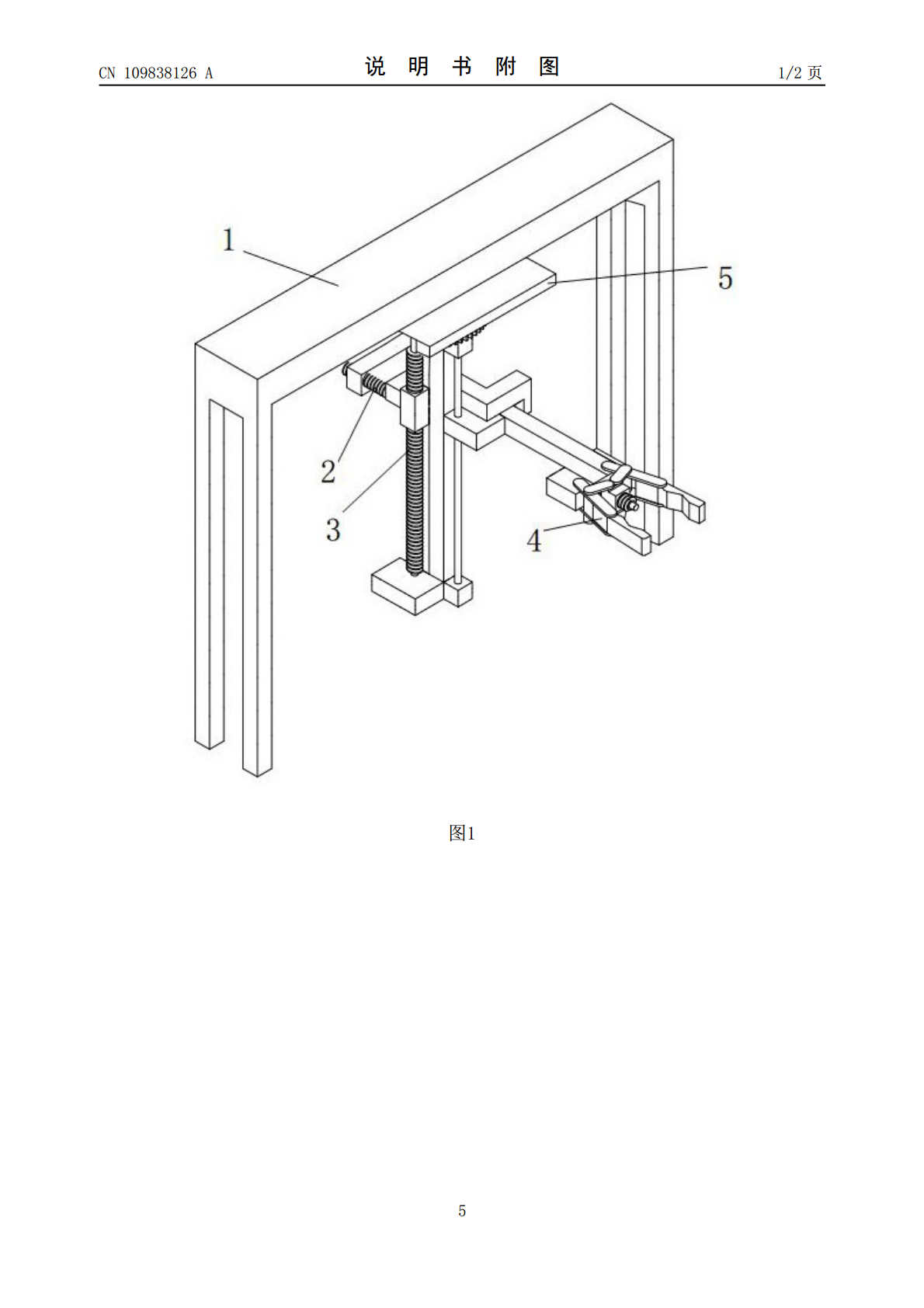
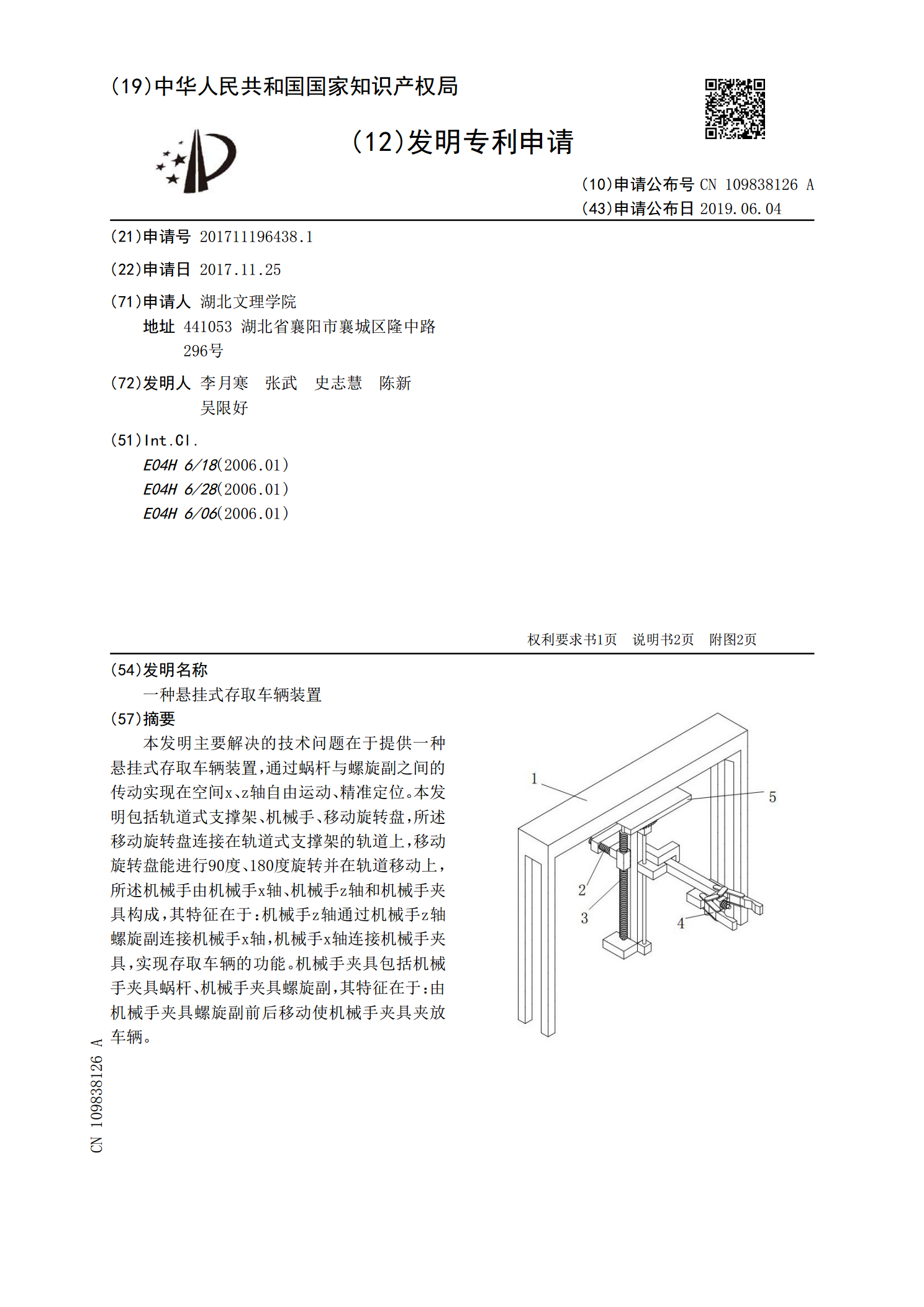
本发明主要解决的技术问题在于提供一种悬挂式存取车辆装置,通过蜗杆与螺旋副之间的传动实现在空间x、z轴自由运动、精准定位。本发明包括轨道式支撑架、机械手、移动旋转盘,所述移动旋转盘连接在轨道式支撑架的轨道上,移动旋转盘能进行90度、180度旋转并在轨道移动上,所述机械手由机械手x轴、机械手z轴和机械手夹具构成,其特征在于:机械手z轴通过机械手z轴螺旋副连接机械手x轴,机械手x轴连接机械手夹具,实现存取车辆的功能。机械手夹具包括机械手夹具蜗杆、机械手夹具螺旋副,其特征在于:由机械手夹具螺旋副前后移动使机械手夹
一种斜坡式车辆存取装置.pdf
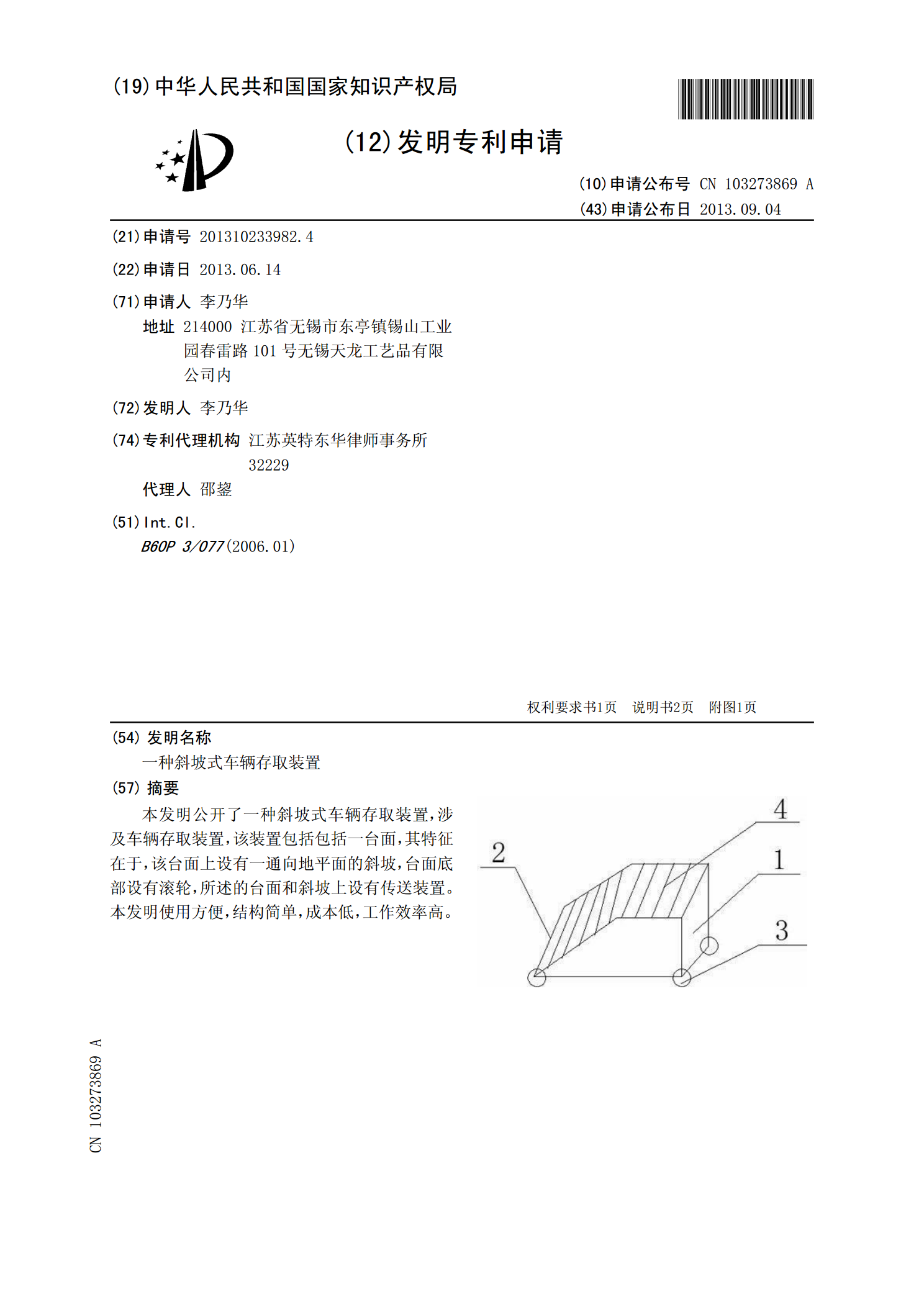
本发明公开了一种斜坡式车辆存取装置,涉及车辆存取装置,该装置包括包括一台面,其特征在于,该台面上设有一通向地平面的斜坡,台面底部设有滚轮,所述的台面和斜坡上设有传送装置。本发明使用方便,结构简单,成本低,工作效率高。

一种车辆存取装置.pdf
本发明涉及一种车辆存取装置,用于向车库位存取车辆,其包括:载车架底座,载车架底座的滑轨内侧安装有导向轮,在载车架底座的一端安装有卡钩装置;载车架,载车架安装在载车架底座上,并且载车架的限位板与导向轮接触以限定载车架运行方向,载车架的下部安装有可在滑轨上滚动的滑轮;第一辊子组,第一辊子组安装在载车架的一侧;第二辊子组,第二棍子组安装在载车架的另一侧;车库位的一端设有车轮阻挡器,车库位的另一端安装有卡扣。本发明的车辆存取装置结构紧凑,机构简单,故障率低,并且实施方式便捷,存、取过程高效快速。与本发明配合建造的

一种车辆横向存取装置.pdf
本发明公开了一种车辆横向存取装置,包括固定机架、固定夹持机构、活动支架及活动夹持机构,在固定机架的两侧分别对称设置一组固定夹持机构,每组固定夹持机构上连接一个活动支架,每个活动支架上分别对称设有一组活动夹持机构。工作时,固定夹持机构在大油缸的作用下靠近车辆同侧一组轮胎相向的一端,活动支架带动活动夹持机构转动至轮胎的另一端,在大油缸和小油缸的共同作用下,驻车轮胎被抬起,驻车置于车辆横向存取装置上,其整体重量由移动滚轮承担,并通过驻车位上的移动机构控制,带动车辆横向存取装置到达立体车库的存取车的所需位置。该装

一种悬挂式车辆系统.pdf
一种悬挂式车辆系统,它包括内设驱动装置或电源的车身、至少两个水平传动轴、至少四个车轮、若干同向间隔布置且结构相同的悬挂组件、设置在所述悬挂组件上的两个相对布置的水平轨道,每个传动轴的两端各接有一个车轮,传动轴的轴线与车身的长度方向延伸线相垂直,所述传动轴与车身之间设置挂接组件,使得所述的车轮设置在车身上且位于车身的上方,驱动装置通过链条或皮带与任一传动轴相连,或者,任一传动轴上设置一驱动电动机,电源通过电线与驱动电动机电相连,每个轨道的延伸走向与所述悬挂组件的布置走向相一致,至少两个同侧车轮与相应侧的那一