
船舶维护水下柔性机器人结构与仿真研究.doc

星星****眨眼


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

船舶维护水下柔性机器人结构与仿真研究.doc
船舶维护水下柔性机器人结构与仿真研究随着国际上船舶业的发展,水下机器人朝着船舶航行过程中所配套的检测设备发展,是快速检测船体的重要手段之一,具有举足轻重的作用。自治水下机器人(AUV)的应用前景非常广阔,浅水观察级AUV的研究对于我国浅水水域检测与探索具有重大意义。针对目前船舶航行中维护检测方面的需要,结合国内外AUV的设计方法,本论文开发了一种柔性结构水下机器人。该机器人能实现小范围快速转弯、动作灵活,抗疲劳性能好等功能,为船舶的快速维护检测提供有力保障,有效防止船体故障的进一步恶化。在研究了国内外AU

船舶维护水下柔性机器人结构与仿真研究.doc
船舶维护水下柔性机器人结构与仿真研究随着国际上船舶业的发展,水下机器人朝着船舶航行过程中所配套的检测设备发展,是快速检测船体的重要手段之一,具有举足轻重的作用。自治水下机器人(AUV)的应用前景非常广阔,浅水观察级AUV的研究对于我国浅水水域检测与探索具有重大意义。针对目前船舶航行中维护检测方面的需要,结合国内外AUV的设计方法,本论文开发了一种柔性结构水下机器人。该机器人能实现小范围快速转弯、动作灵活,抗疲劳性能好等功能,为船舶的快速维护检测提供有力保障,有效防止船体故障的进一步恶化。在研究了国内外AU

柔性机器人水下运动的建模与仿真.docx
柔性机器人水下运动的建模与仿真柔性机器人与刚性机器人相比,柔性机器人具有可实现高速操作的能力、较高的负载自重比、较低的能耗和较低的生产成本以及具有更大的工作空间等优点。但是由于柔性机器人具有弹性变形,因此柔性机器人是一个非常复杂的动力学系统,其动力学方程具有高度非线性、强耦合以及时变等的特点。前期柔性机器人研究更多的是考虑如何消除或者主动控制由于高速轻质结构而产生的振动,而如何主动利用柔性机器人的结构柔性是最新研究的方向。本文以在水下环境利用结构柔性实现柔顺运动为研究对象,对柔性机器人水下运动进行了动力学
柔性机器人水下运动的建模与仿真.docx
柔性机器人水下运动的建模与仿真柔性机器人与刚性机器人相比,柔性机器人具有可实现高速操作的能力、较高的负载自重比、较低的能耗和较低的生产成本以及具有更大的工作空间等优点。但是由于柔性机器人具有弹性变形,因此柔性机器人是一个非常复杂的动力学系统,其动力学方程具有高度非线性、强耦合以及时变等的特点。前期柔性机器人研究更多的是考虑如何消除或者主动控制由于高速轻质结构而产生的振动,而如何主动利用柔性机器人的结构柔性是最新研究的方向。本文以在水下环境利用结构柔性实现柔顺运动为研究对象,对柔性机器人水下运动进行了动力学
仿真机器人手腕柔性结构.pdf
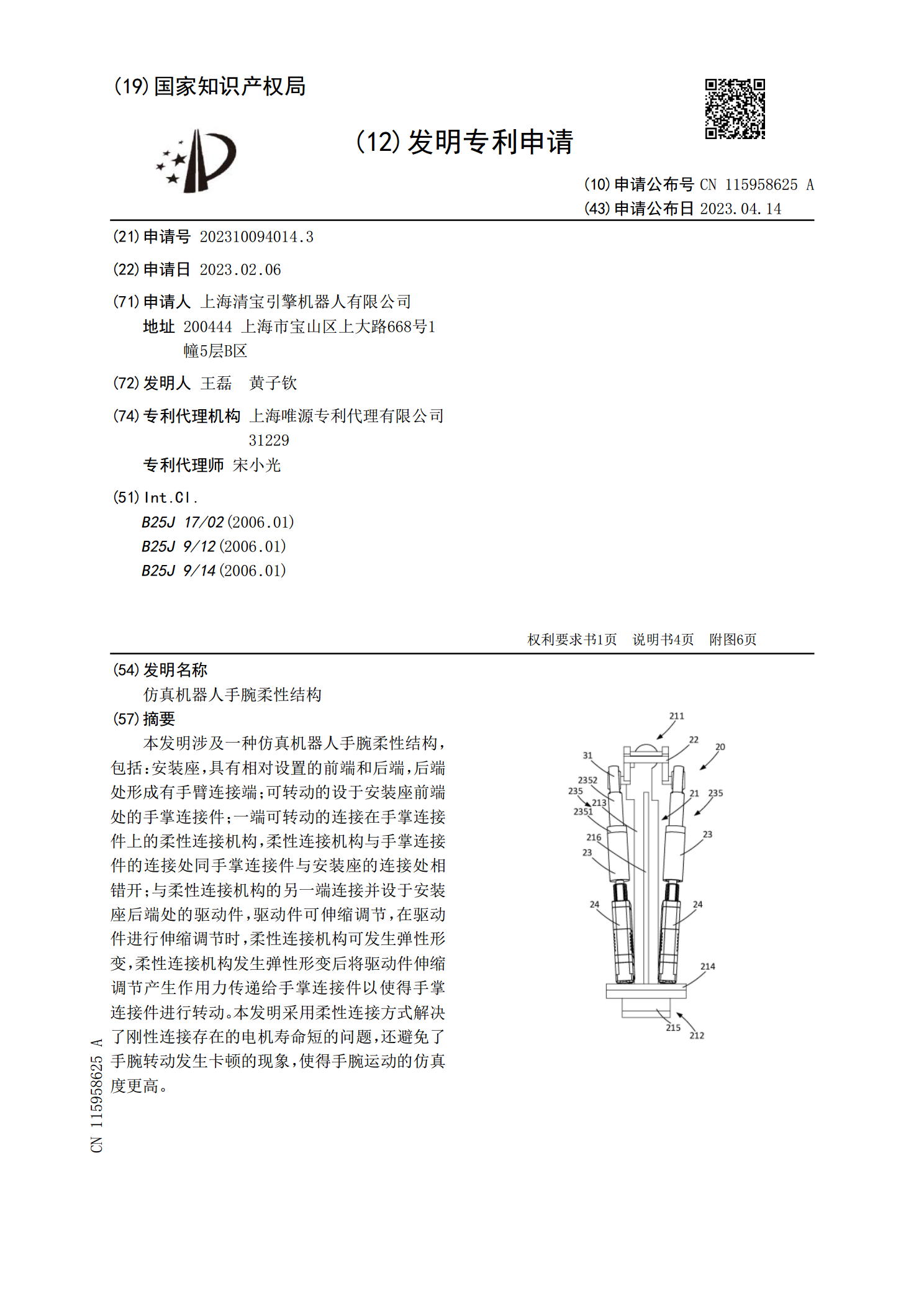
本发明涉及一种仿真机器人手腕柔性结构,包括:安装座,具有相对设置的前端和后端,后端处形成有手臂连接端;可转动的设于安装座前端处的手掌连接件;一端可转动的连接在手掌连接件上的柔性连接机构,柔性连接机构与手掌连接件的连接处同手掌连接件与安装座的连接处相错开;与柔性连接机构的另一端连接并设于安装座后端处的驱动件,驱动件可伸缩调节,在驱动件进行伸缩调节时,柔性连接机构可发生弹性形变,柔性连接机构发生弹性形变后将驱动件伸缩调节产生作用力传递给手掌连接件以使得手掌连接件进行转动。本发明采用柔性连接方式解决了刚性连接存