
一种结构可调的多激光雷达耦合系统及其控制方法.pdf

努力****星驰

1/10

2/10

3/10
4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种结构可调的多激光雷达耦合系统及其控制方法.pdf
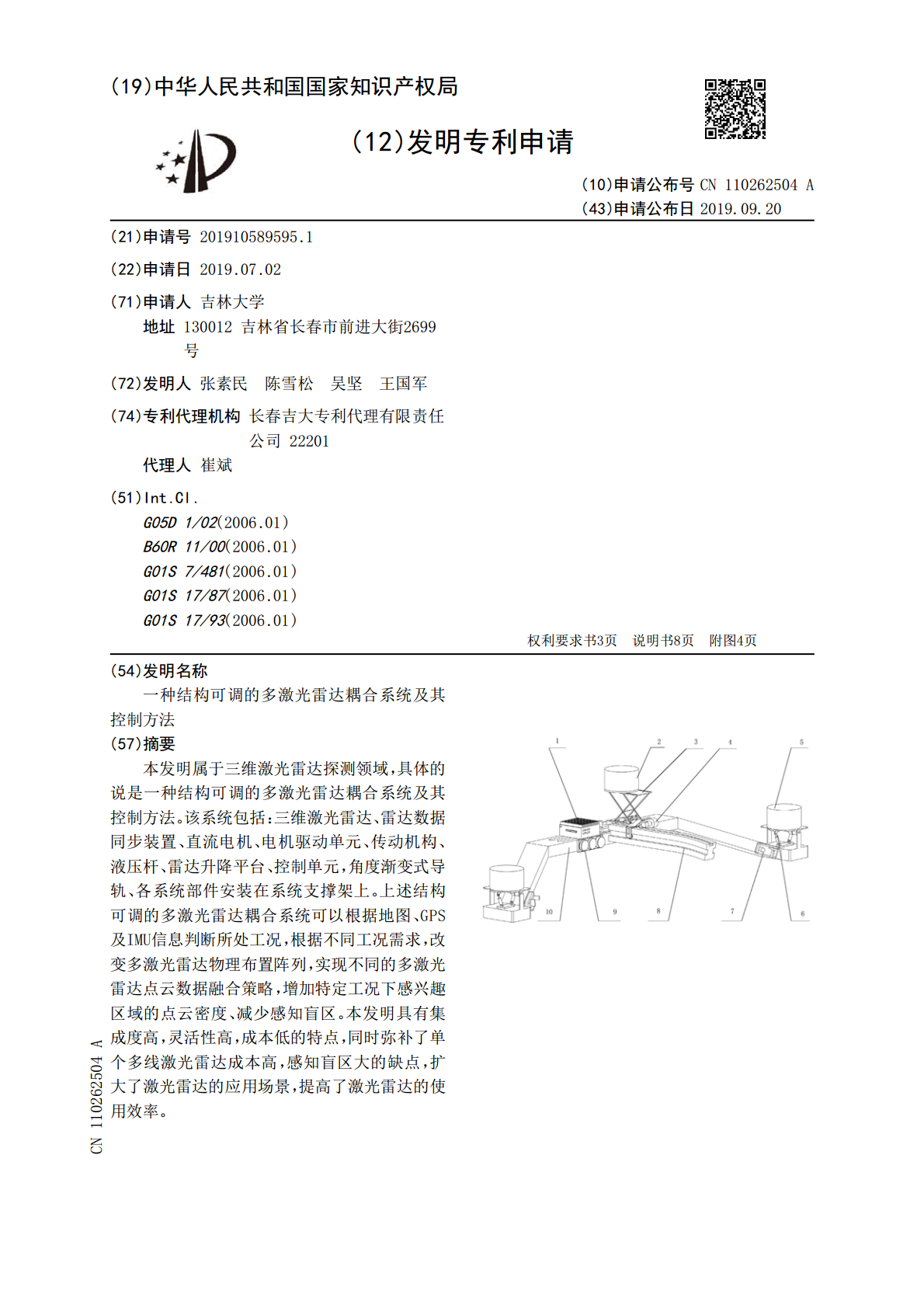
本发明属于三维激光雷达探测领域,具体的说是一种结构可调的多激光雷达耦合系统及其控制方法。该系统包括:三维激光雷达、雷达数据同步装置、直流电机、电机驱动单元、传动机构、液压杆、雷达升降平台、控制单元,角度渐变式导轨、各系统部件安装在系统支撑架上。上述结构可调的多激光雷达耦合系统可以根据地图、GPS及IMU信息判断所处工况,根据不同工况需求,改变多激光雷达物理布置阵列,实现不同的多激光雷达点云数据融合策略,增加特定工况下感兴趣区域的点云密度、减少感知盲区。本发明具有集成度高,灵活性高,成本低的特点,同时弥补了
一种多镜头多线激光雷达测距系统及其测距方法.pdf
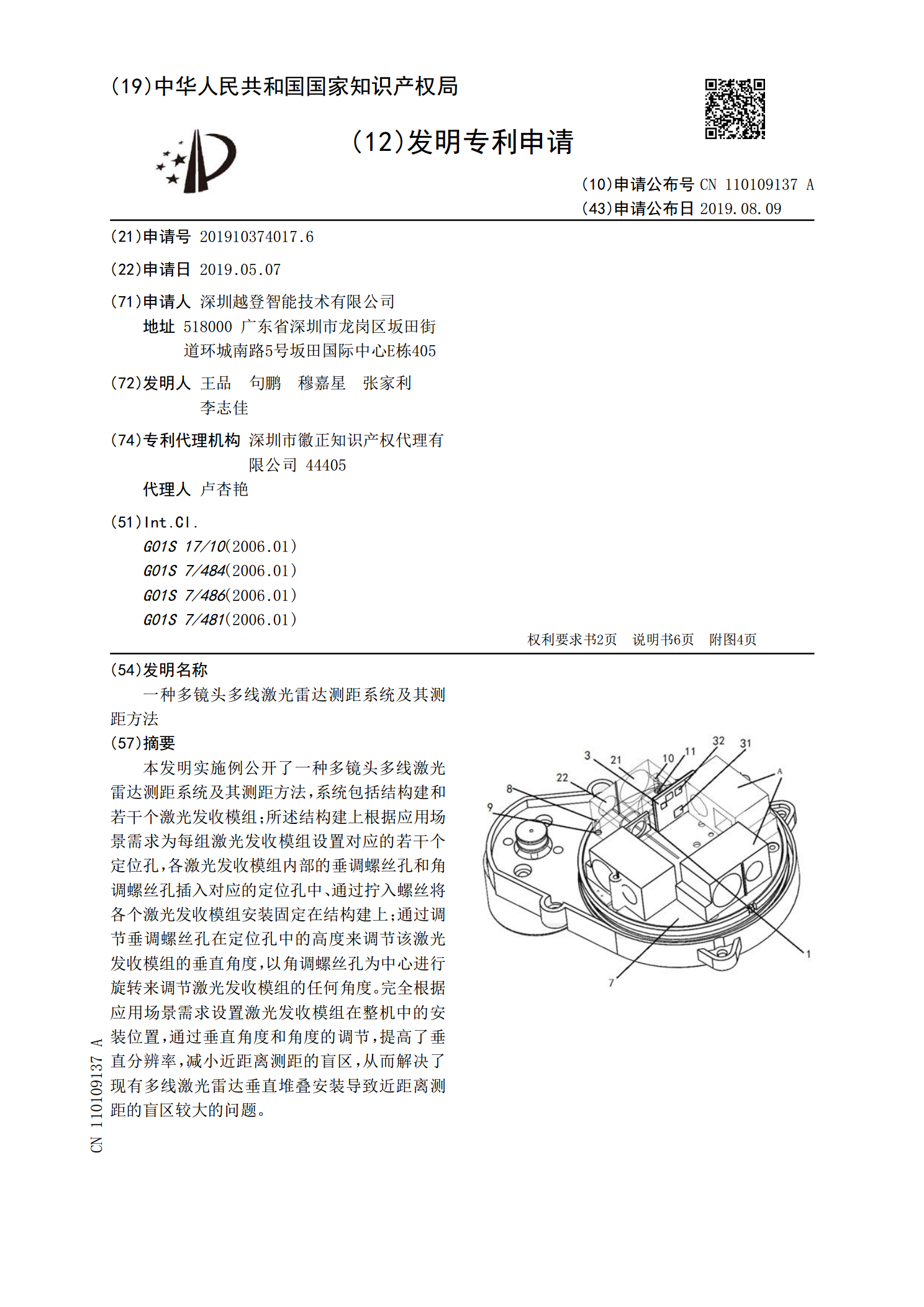
本发明实施例公开了一种多镜头多线激光雷达测距系统及其测距方法,系统包括结构建和若干个激光发收模组;所述结构建上根据应用场景需求为每组激光发收模组设置对应的若干个定位孔,各激光发收模组内部的垂调螺丝孔和角调螺丝孔插入对应的定位孔中、通过拧入螺丝将各个激光发收模组安装固定在结构建上;通过调节垂调螺丝孔在定位孔中的高度来调节该激光发收模组的垂直角度,以角调螺丝孔为中心进行旋转来调节激光发收模组的任何角度。完全根据应用场景需求设置激光发收模组在整机中的安装位置,通过垂直角度和角度的调节,提高了垂直分辨率,减小近距

一种多源耦合滑板底盘系统及其多目标集成控制方法.pdf
本发明公开了一种多源耦合滑板底盘系统及其多目标集成控制方法,包括:电液四轮转向模块、分布式驱动模块、电液复合制动模块、集成控制模块和底盘车架;本发明采用多目标集成控制方法对多源耦合滑板底盘系统进行控制,综合考虑滑板底盘四轮转向、分布式驱动及差动制动,建立整车动力学模型,采用模型预测控制方法对底盘系统进行集中优化控制,实现底盘各子系统的统一协调控制,提高了整体系统的控制稳定性和轨迹跟踪精度。

一种牵引车可调节鞍座结构及其控制系统、控制方法.pdf
本申请涉及牵引车鞍座技术领域,特别涉及一种牵引车可调节鞍座结构及其控制系统、控制方法。本申请的牵引车可调节鞍座结构包括:支撑架;滑板,卡设在支撑架内;第一液压缸,其固定端与支撑架连接,其活动端与滑板连接;第二液压缸,其固定端与滑板连接;第一连接板,其设置在支撑架的上方;第二连接板,其可拆卸连接在第一连接板的上方,其下端与第二液压缸的活动端连接;鞍座,设置在第二连接板的上方;第一控制装置,包括参数输入单元、第一驱动控制单元和第二驱动控制单元,所述参数输入单元用于输入鞍座的待移动距离,所述第一驱动控制单元控制
一种多场耦合微波烧结装置及其控制方法.pdf
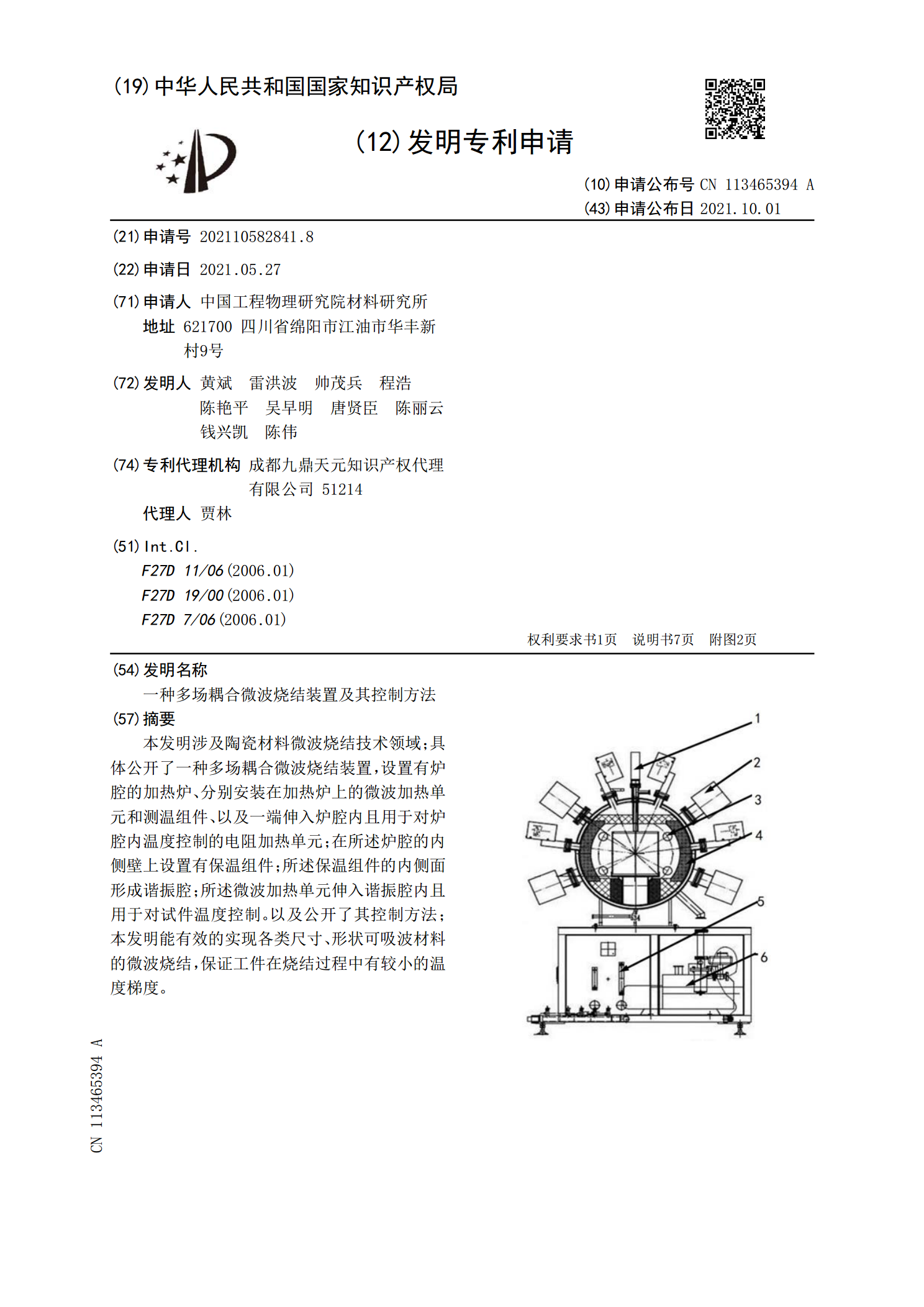
本发明涉及陶瓷材料微波烧结技术领域;具体公开了一种多场耦合微波烧结装置,设置有炉腔的加热炉、分别安装在加热炉上的微波加热单元和测温组件、以及一端伸入炉腔内且用于对炉腔内温度控制的电阻加热单元;在所述炉腔的内侧壁上设置有保温组件;所述保温组件的内侧面形成谐振腔;所述微波加热单元伸入谐振腔内且用于对试件温度控制。以及公开了其控制方法;本发明能有效的实现各类尺寸、形状可吸波材料的微波烧结,保证工件在烧结过程中有较小的温度梯度。