
一种多源耦合滑板底盘系统及其多目标集成控制方法.pdf

是你****韵呀

1/10

2/10

3/10

4/10
5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种多源耦合滑板底盘系统及其多目标集成控制方法.pdf
本发明公开了一种多源耦合滑板底盘系统及其多目标集成控制方法,包括:电液四轮转向模块、分布式驱动模块、电液复合制动模块、集成控制模块和底盘车架;本发明采用多目标集成控制方法对多源耦合滑板底盘系统进行控制,综合考虑滑板底盘四轮转向、分布式驱动及差动制动,建立整车动力学模型,采用模型预测控制方法对底盘系统进行集中优化控制,实现底盘各子系统的统一协调控制,提高了整体系统的控制稳定性和轨迹跟踪精度。

一种多源多目标声光同步控制系统及控制方法.pdf
本发明涉及一种景观多源多目标声光同步控制系统,与以往的景观控制系统的最大不同是具有广泛的综合接入及管理能力;以往的景观控制系统对景观照明设施、景观缀饰、特效激光、特效音乐、户外屏幕显示等的管控都是由各自独立的系统独立管理,无法建立集中控制中心进行统一的控制和管理,且不同类型景观设施之间缺少自动协同能力,当各个景观之间需要进行协同展示时,需要通过人工参与来实现景观设施之间的协同和同步;而本系统则能最大限度的解决这一纷繁的管控问题,同时本系统不拘泥于传统的控制中心理念,使管控具有便携式的特性,另外为被管控对象
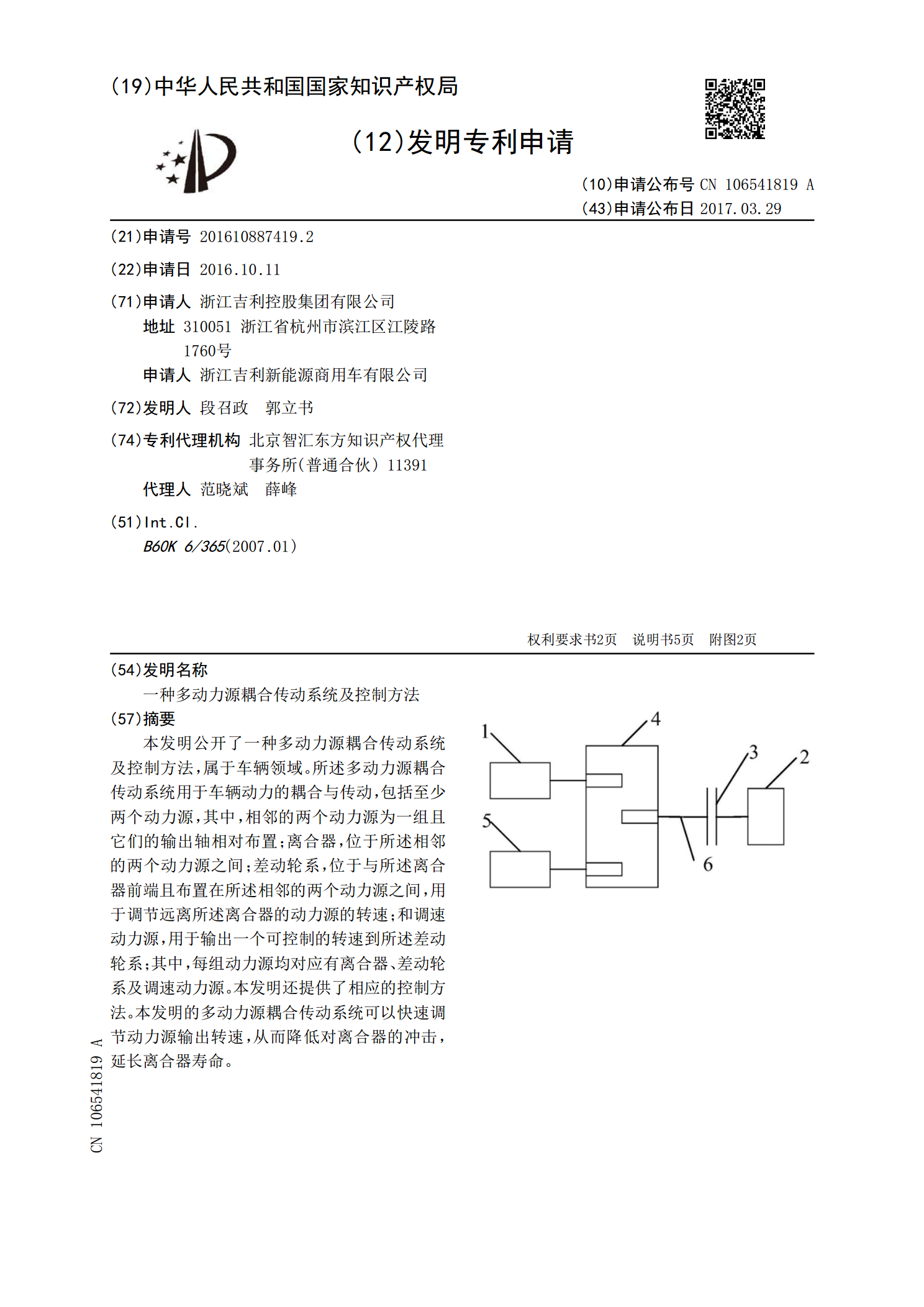
一种多动力源耦合传动系统及控制方法.pdf
本发明公开了一种多动力源耦合传动系统及控制方法,属于车辆领域。所述多动力源耦合传动系统用于车辆动力的耦合与传动,包括至少两个动力源,其中,相邻的两个动力源为一组且它们的输出轴相对布置;离合器,位于所述相邻的两个动力源之间;差动轮系,位于与所述离合器前端且布置在所述相邻的两个动力源之间,用于调节远离所述离合器的动力源的转速;和调速动力源,用于输出一个可控制的转速到所述差动轮系;其中,每组动力源均对应有离合器、差动轮系及调速动力源。本发明还提供了相应的控制方法。本发明的多动力源耦合传动系统可以快速调节动力源输

一种汽车底盘集成系统及其优化方法.pdf
本发明公开了一种汽车底盘集成系统及其优化方法,汽车底盘集成系统包括差动助力转向模块、电机制动模块和半主动悬架模块。优化时,以差动助力转向模块、电机制动模块和半主动悬架模块的部分结构参数为根须,以差动助力转向模块、电机制动模块和半主动悬架模块为树根,以汽车综合性能指标为树干,以转向性能、制动效能和悬架平顺性为树枝,以转向路感、转向灵敏度、制动减速度、车身加速度、悬架动挠度和车轮相对动载为树叶建立树形结构的汽车底盘集成系统优化模型,并基于该优化模型,采用Evol算法对底盘集成系统进行优化设计。
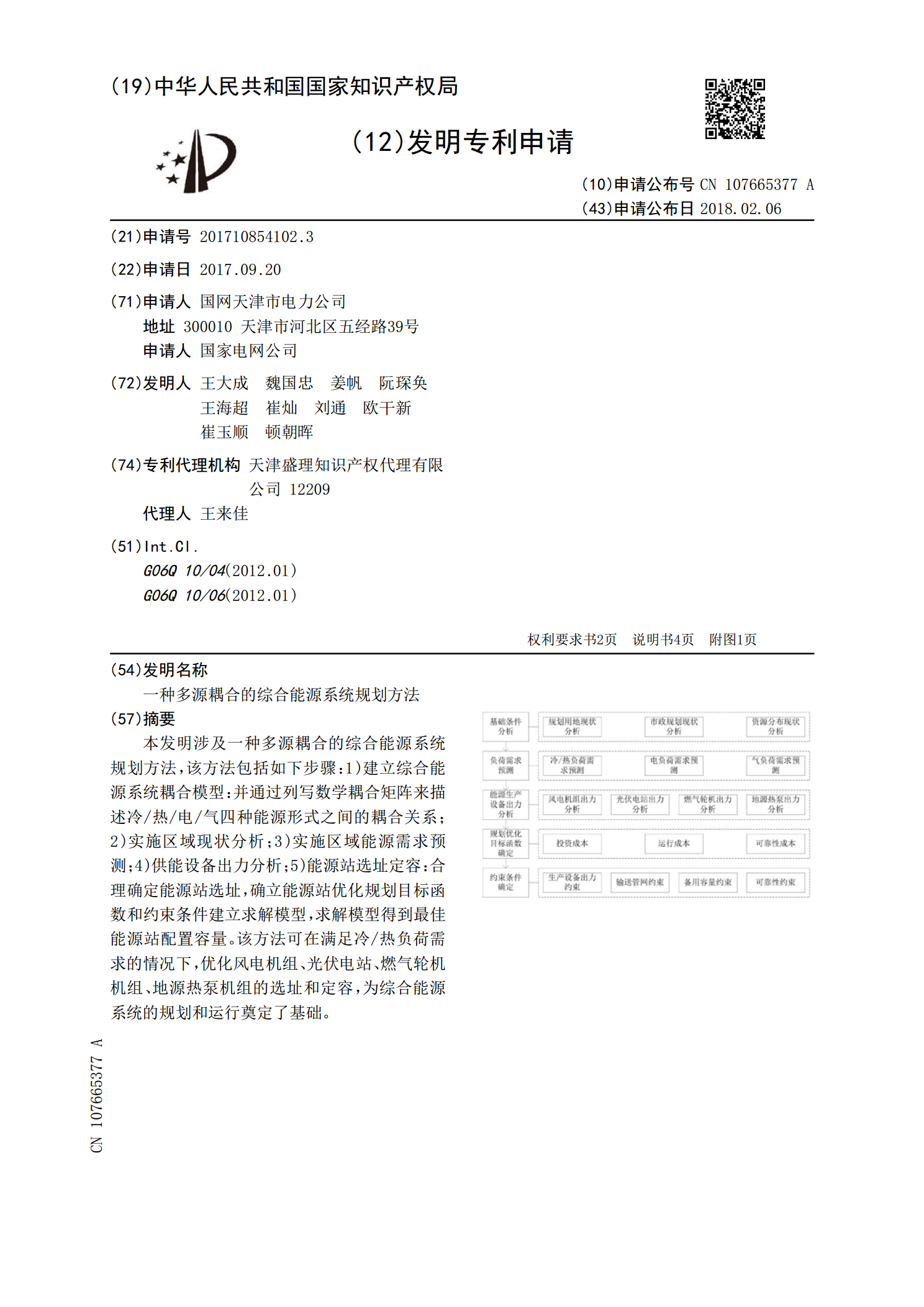
一种多源耦合的综合能源系统规划方法.pdf
本发明涉及一种多源耦合的综合能源系统规划方法,该方法包括如下步骤:1)建立综合能源系统耦合模型:并通过列写数学耦合矩阵来描述冷/热/电/气四种能源形式之间的耦合关系;2)实施区域现状分析;3)实施区域能源需求预测;4)供能设备出力分析;5)能源站选址定容:合理确定能源站选址,确立能源站优化规划目标函数和约束条件建立求解模型,求解模型得到最佳能源站配置容量。该方法可在满足冷/热负荷需求的情况下,优化风电机组、光伏电站、燃气轮机机组、地源热泵机组的选址和定容,为综合能源系统的规划和运行奠定了基础。