
全柔性微位移放大机构的设计与分析.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

全柔性微位移放大机构的设计与分析.docx
全柔性微位移放大机构的设计与分析全柔性微位移放大机构的设计与分析摘要:本论文介绍了一种全柔性微位移放大机构的设计与分析。该机构借助柔性结构进行位移放大,并采用了新型的传感器和控制算法,实现精确的位移控制。论文对机构的设计、优化和实验结果进行了详细的阐述,并分析了机构的性能和优缺点。关键词:微位移放大机构,柔性结构,传感器,控制算法,性能分析。1.研究背景在现代工业领域,微位移传感和控制技术已经成为一个热门的研究方向。然而,由于传感器的灵敏度和控制系统的稳定性限制,微位移控制技术难以实现高精度、高速、稳定性

柔性微位移放大机构的结构特征分析与改进设计.docx
柔性微位移放大机构的结构特征分析与改进设计柔性微位移放大机构的结构特征分析与改进设计摘要:柔性微位移放大机构是一种用于微位移测量的重要装置。本文在对其结构特征进行分析的基础上,提出了一种改进设计,以提高其灵敏度和精度。一、引言微位移测量是一项广泛应用于精密制造、仪器仪表、光学等领域的技术,其精度和灵敏度对产品质量和工艺控制至关重要。柔性微位移放大机构是一种重要的测量装置,它具有使用简便、灵敏、无损耗等特点,被广泛应用于多个领域。但是,由于其本身结构的局限性,目前在稳定性、灵敏度、动态响应等方面仍然存在困难

柔性微位移放大机构的设计与动力性能仿真分析.docx
柔性微位移放大机构的设计与动力性能仿真分析随着机械设计技术的不断进步,微位移放大机构的设计也逐渐得到了更加精细和高效的实现。本文将探讨柔性微位移放大机构的设计与动力性能仿真分析,从而进一步提高微位移检测技术的精度和稳定性。一、柔性微位移放大机构的设计在设计柔性微位移放大机构时,需要考虑到以下几个关键因素:(1)结构简单:微位移放大机构需要尽可能地避免多余的复杂结构,以降低机构本身的干扰及制造成本。(2)放大系数高:微位移的检测通常需要放大系数高的机构,以提高精度和灵敏度。(3)柔性设计:通过柔性设计实现微
一种全柔性铰链微位移放大机构.pdf
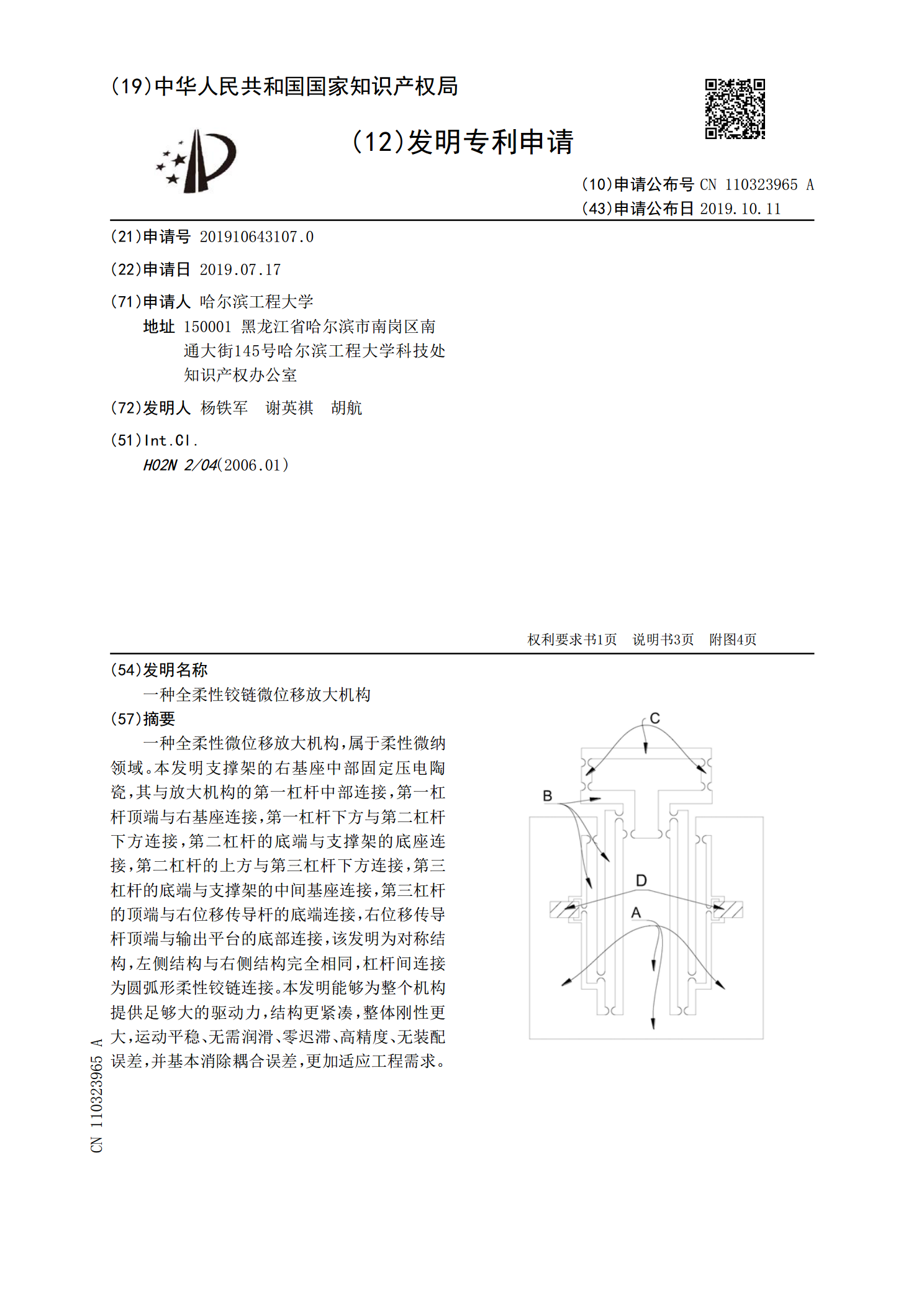
一种全柔性微位移放大机构,属于柔性微纳领域。本发明支撑架的右基座中部固定压电陶瓷,其与放大机构的第一杠杆中部连接,第一杠杆顶端与右基座连接,第一杠杆下方与第二杠杆下方连接,第二杠杆的底端与支撑架的底座连接,第二杠杆的上方与第三杠杆下方连接,第三杠杆的底端与支撑架的中间基座连接,第三杠杆的顶端与右位移传导杆的底端连接,右位移传导杆顶端与输出平台的底部连接,该发明为对称结构,左侧结构与右侧结构完全相同,杠杆间连接为圆弧形柔性铰链连接。本发明能够为整个机构提供足够大的驱动力,结构更紧凑,整体刚性更大,运动平稳、

柔性对称微位移放大机构性能分析方法的研究.docx
柔性对称微位移放大机构性能分析方法的研究摘要在柔性对称微位移放大机构设计与控制中,性能分析是非常关键的环节。本文针对该问题进行了深入研究,提出了一种基于有限元和模态分析的性能分析方法。该方法综合考虑了机构的结构特性和动态响应,对机构的放大比、灵敏度和精度等性能进行了优化和预测。本文利用实例验证了该方法的有效性和实用性。关键词:柔性对称微位移放大机构;性能分析;有限元;模态分析Introduction柔性对称微位移放大机构被广泛应用于精密仪器、光学仪器等精细生产领域。该机构能够将微小的位移转化成较大的位移,