
一种具有缓冲功能的液压双足机器人下肢机构.pdf

Ro****44

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种具有缓冲功能的液压双足机器人下肢机构.pdf
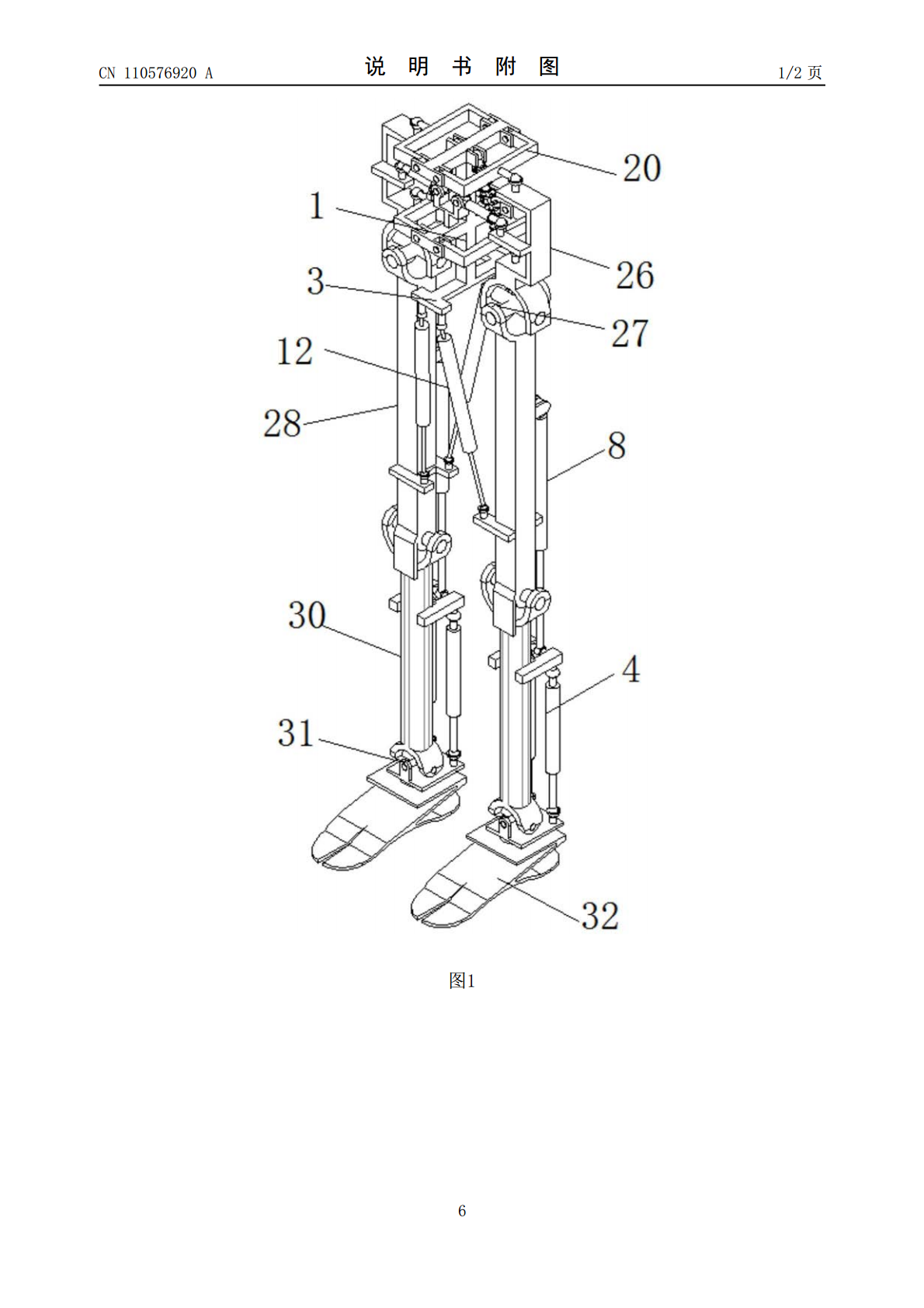
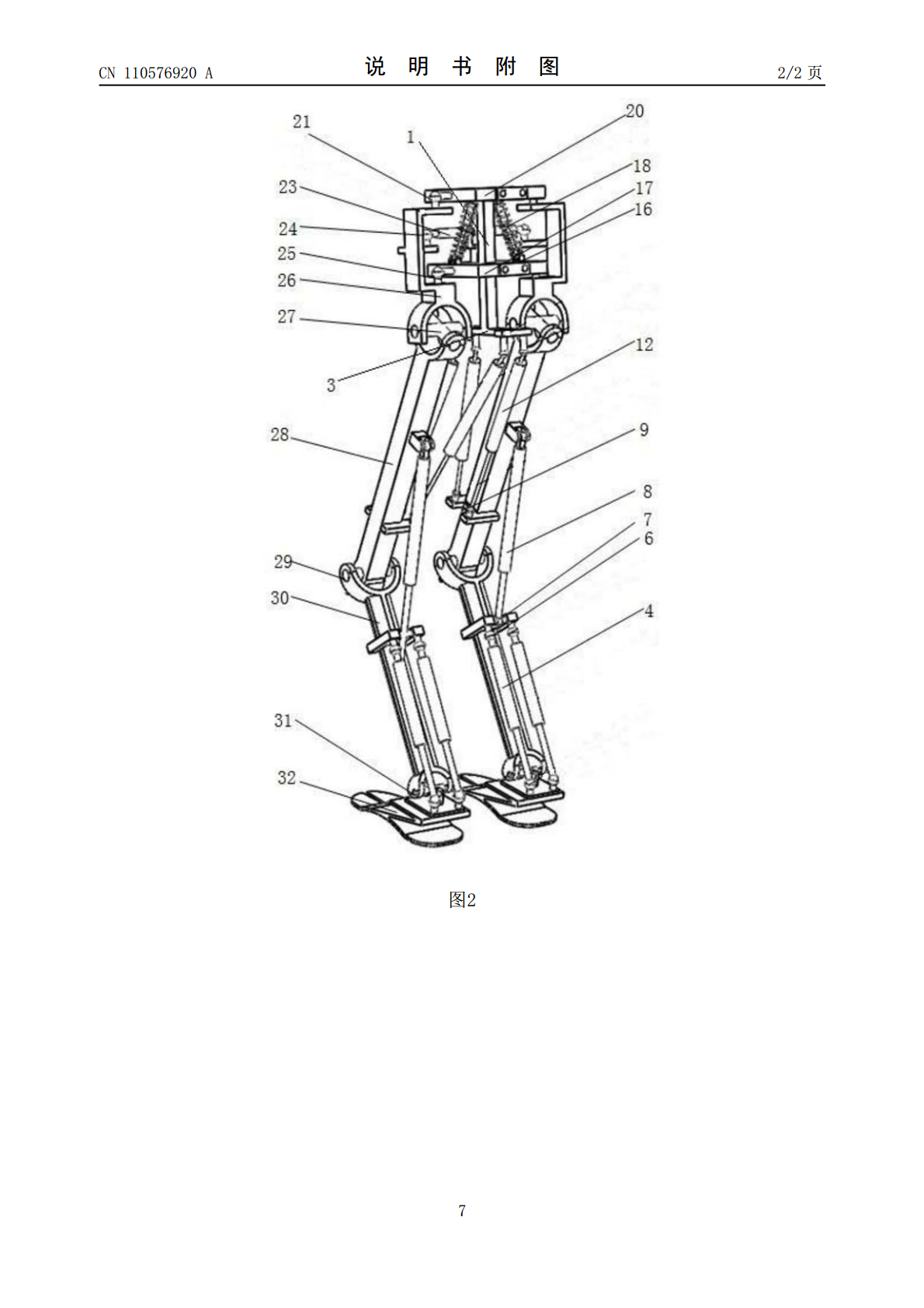
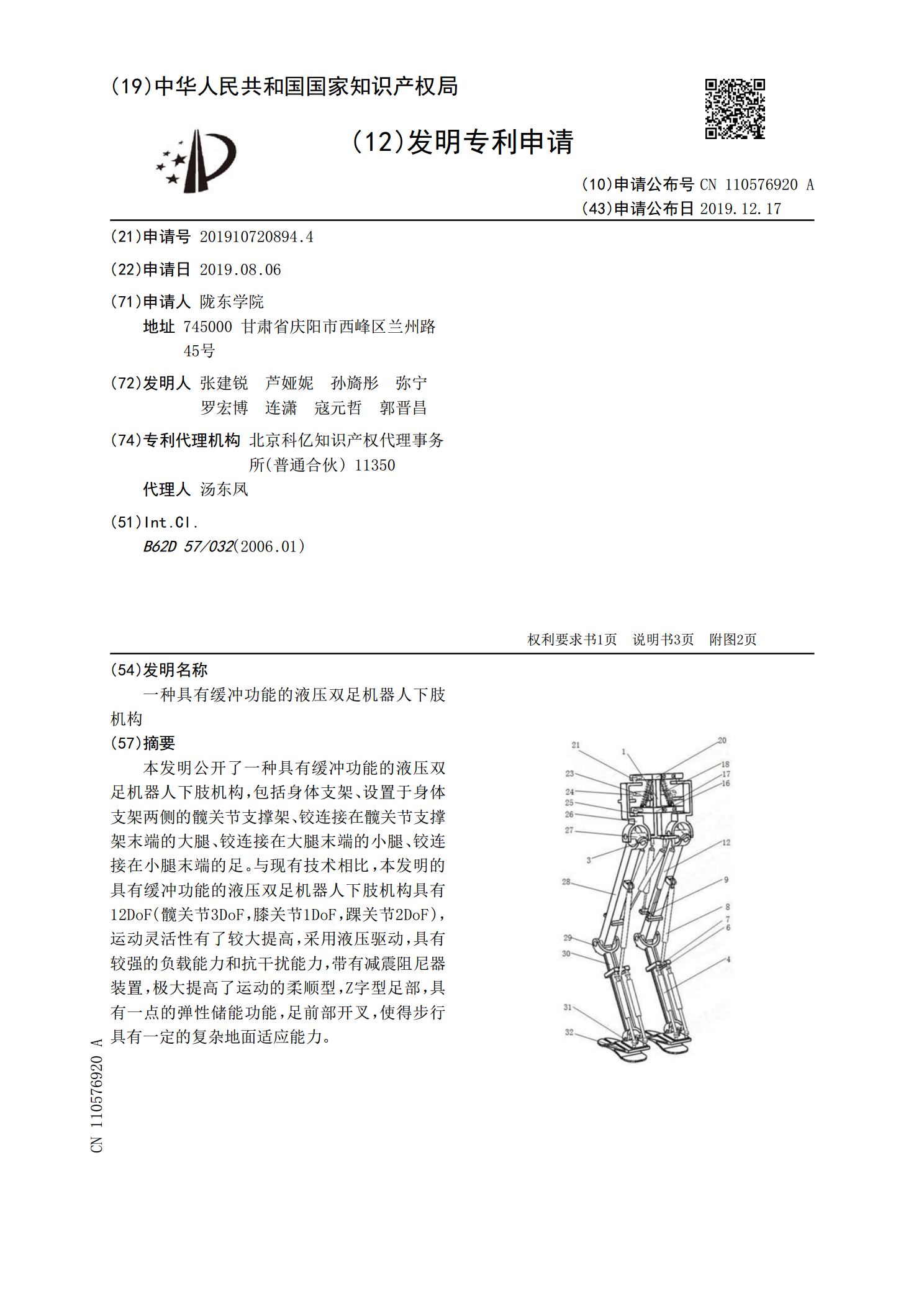
本发明公开了一种具有缓冲功能的液压双足机器人下肢机构,包括身体支架、设置于身体支架两侧的髋关节支撑架、铰连接在髋关节支撑架末端的大腿、铰连接在大腿末端的小腿、铰连接在小腿末端的足。与现有技术相比,本发明的具有缓冲功能的液压双足机器人下肢机构具有12DoF(髋关节3DoF,膝关节1DoF,踝关节2DoF),运动灵活性有了较大提高,采用液压驱动,具有较强的负载能力和抗干扰能力,带有减震阻尼器装置,极大提高了运动的柔顺型,Z字型足部,具有一点的弹性储能功能,足前部开叉,使得步行具有一定的复杂地面适应能力。
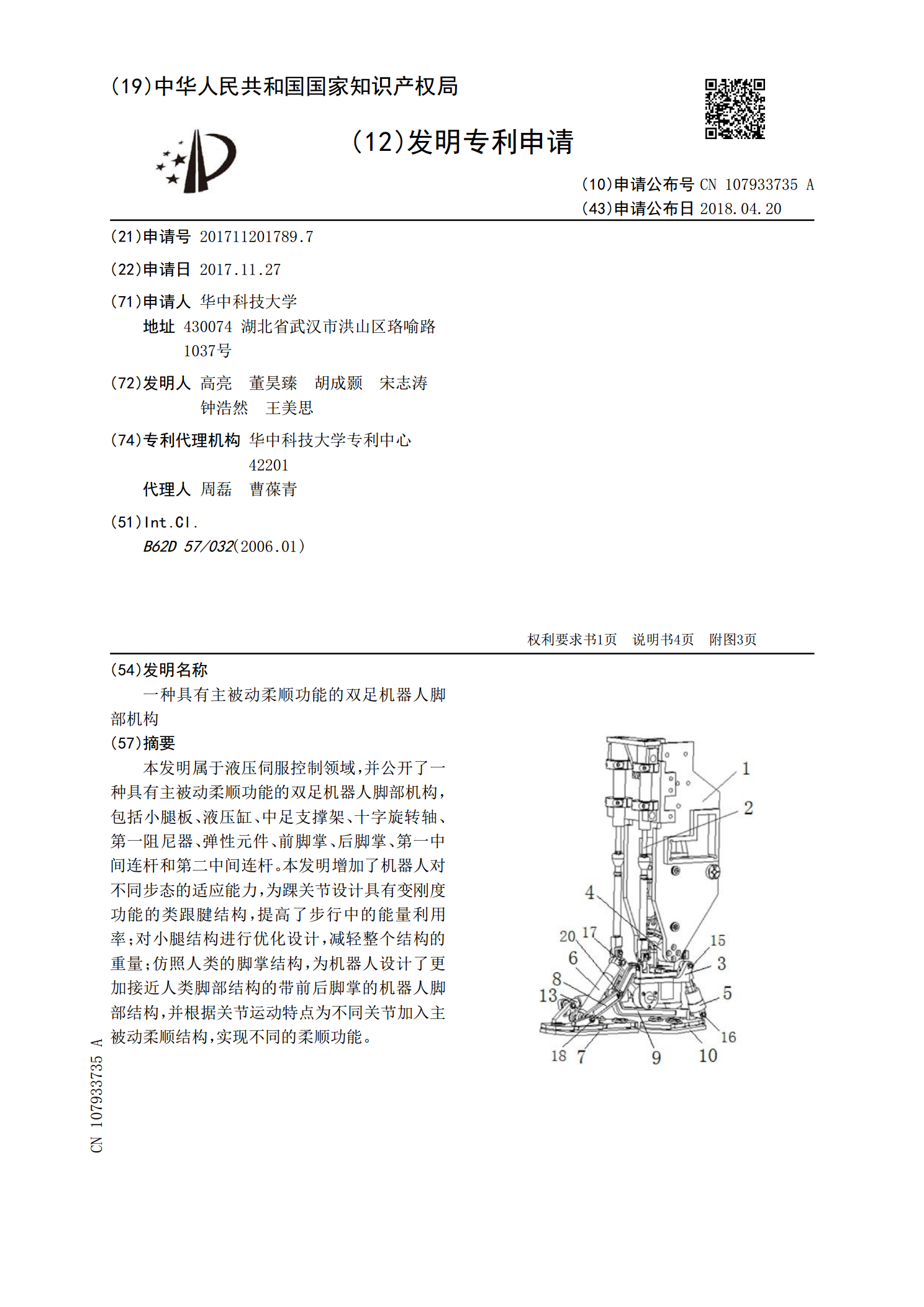
一种具有主被动柔顺功能的双足机器人脚部机构.pdf
本发明属于液压伺服控制领域,并公开了一种具有主被动柔顺功能的双足机器人脚部机构,包括小腿板、液压缸、中足支撑架、十字旋转轴、第一阻尼器、弹性元件、前脚掌、后脚掌、第一中间连杆和第二中间连杆。本发明增加了机器人对不同步态的适应能力,为踝关节设计具有变刚度功能的类跟腱结构,提高了步行中的能量利用率;对小腿结构进行优化设计,减轻整个结构的重量;仿照人类的脚掌结构,为机器人设计了更加接近人类脚部结构的带前后脚掌的机器人脚部结构,并根据关节运动特点为不同关节加入主被动柔顺结构,实现不同的柔顺功能。

具有越障功能的双足机器人.pdf
本发明公开了一种具有越障功能的双足机器人,包括行走装置和越障装置,所述行走装置包括竖直设置的机架、设于所述机架内的电机、连接于所述电机上的输出齿轮、以及与所述输出齿轮相啮合的传动齿轮,所述传动齿轮中心设有传动轴,所述传动轴安装于轴架上,所述传动轴的两端各安装一个沿其径向延伸的曲柄,所述曲柄的另一端垂直向外延伸有转轴,所述机架的两外侧边位于转轴上方处向外延伸有支撑轴,所述转轴和支撑轴位于同一竖直平面上,两个所述曲柄的转动角相差180°。本发明行走灵活,并具备越障功能,使用广泛,具有实用性。

一种具有缓冲功能的液压杆.pdf
本发明公开一种具有缓冲功能的液压杆,属于液压装置技术领域,包括防护板,其底端固定有液压杆本体,所述液压杆本体连接有第一缓冲板与第二缓冲板,所述第一缓冲板底端开有两个第一凹槽,所述第一凹槽中固定有第一滑杆,所述第一滑杆上滑动连接有两个第一移动块,两个所述第一移动块分别与所述第一凹槽两侧壁均通过第一弹簧连接;所述第二缓冲板顶端固定有两根直杆,所述直杆顶端开有第二凹槽并设有移动杆,所述移动杆一端与所述第二凹槽通过第二弹簧连接,另一端固定有连接块,所述连接块通过第一转轴连接有两根第一缓冲杆,其另一端分别与两个所述
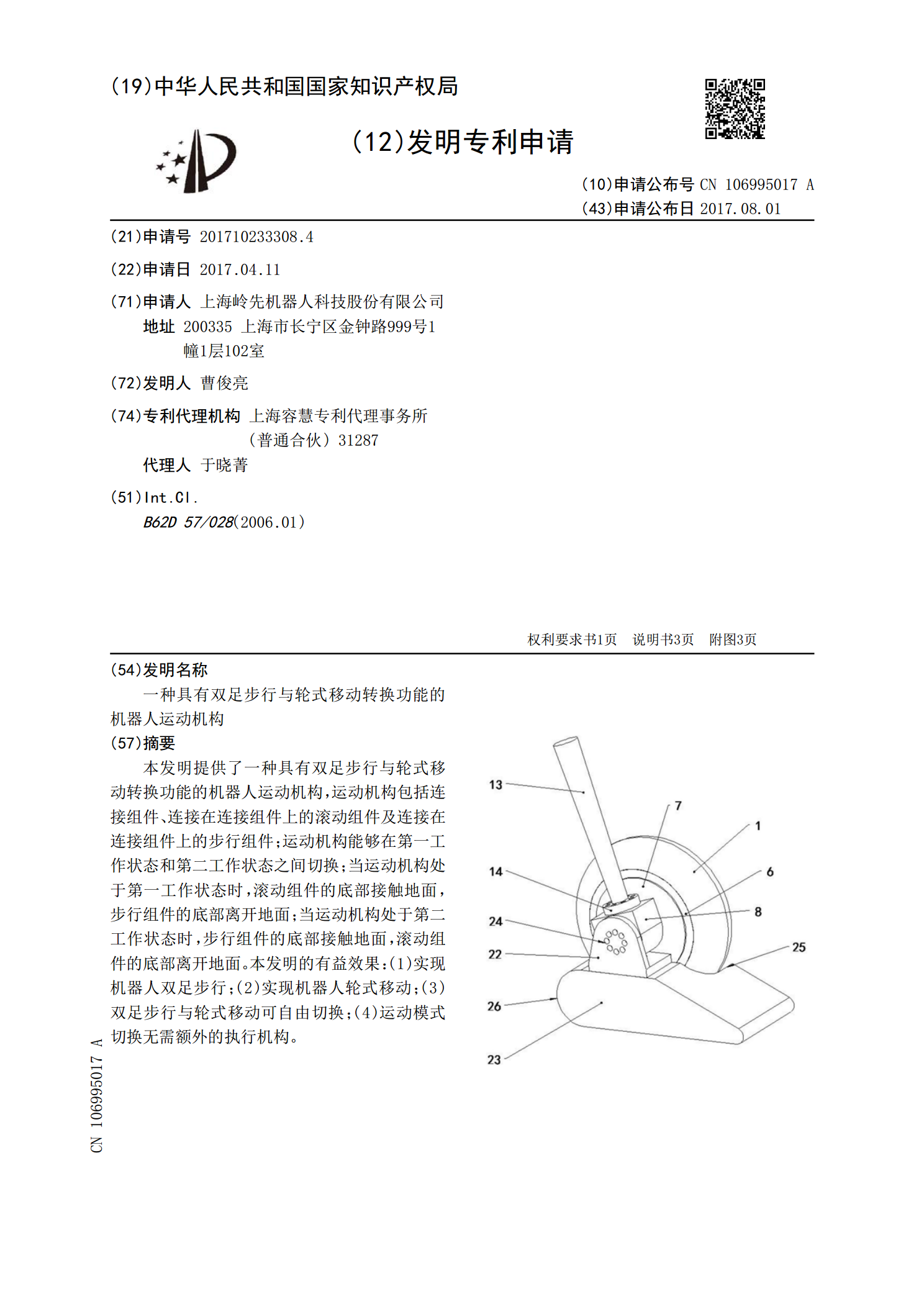
一种具有双足步行与轮式移动转换功能的机器人运动机构.pdf
本发明提供了一种具有双足步行与轮式移动转换功能的机器人运动机构,运动机构包括连接组件、连接在连接组件上的滚动组件及连接在连接组件上的步行组件;运动机构能够在第一工作状态和第二工作状态之间切换;当运动机构处于第一工作状态时,滚动组件的底部接触地面,步行组件的底部离开地面;当运动机构处于第二工作状态时,步行组件的底部接触地面,滚动组件的底部离开地面。本发明的有益效果:(1)实现机器人双足步行;(2)实现机器人轮式移动;(3)双足步行与轮式移动可自由切换;(4)运动模式切换无需额外的执行机构。