
一种智能的行走康复护理装置.pdf

是向****23


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种智能行走康复护理装置.pdf
本发明公开了康复护理技术领域的一种智能行走康复护理装置,包括盛放桶体,所述盛放桶体的底部四周均匀设有带刹车的万向轮,所述盛放桶体的外壁左侧下部设有蓄电池,所述盛放桶体的外壁右侧上部沿口转动连接有支撑板,所述盛放桶体的内腔底部中央设有轴承,所述轴承的内腔插接有立柱,销轴插入第一链板与第二链板之间的安装孔内,使两组第二链板和第一链板组合,利用第三电动推杆伸长和缩短,形成颠覆路面,内桶体与盛放桶体之间推杆轴承和立柱转动连接,病人在行走康复过程中的视野,根据自己的想法改变方向,进而不会使得病人产生枯燥和烦闷感,有

一种智能的行走康复护理装置.pdf
本发明公开了一种智能的行走康复护理装置,涉及康复护理装置领域,针对现有行走康复护理装置不能够方便的移动,或者随意的调节,以满足不同的行走训练的问题,现提出如下方案,其包括左、右两个支撑架,两个所述支撑架互相靠近的一侧面均设置有铰链,所述铰链上连接有连接杆,所述连接杆的下端互相靠近的一侧面均固定连接有脚踏板,其特征在于,所述连接杆的下端固定连接有弧形板,所述弧形板内设置有腔体,所述弧形板互相靠近的一侧面均设置有转盘,所述转盘互相远离的一侧面均固定连接有转轴,所述转轴的表面均固定套接第一锥形齿轮,所述腔体内设

一种智能行走康复护理装置.pdf
本发明公开了一种智能行走康复护理装置,包括底板、两个行走单元及托架,所述行走单元包括支架、支撑板、腿部支杆及手部支杆,所述腿部支杆的一端设有脚踏板,所述腿部支杆的另一端设有第一齿轮,所述支架上设有变阻尼电磁阻尼器,所述变阻尼电磁阻尼器上设有控制器;所述支撑板上设有连杆和第三齿轮,所述手部支杆的一端设有第二齿轮,所述连杆的两端对称设有两个不完全齿轮。该装置通过连杆实现了腿部支杆与手部支杆的联动,使得病人在行走时能够模拟出正常人行走时手臂和腿部的摆动,进而真实的训练病人,进而使得病人行走的更加协调平稳。

一种可调节的老年康复护理用辅助行走装置.pdf
本发明公开了一种可调节的老年康复护理用辅助行走装置,涉及老年代步领域,针对老年人在生病后其行走能力不足的问题,现提出如下方案,包括踏板,所述踏板的顶部壳体焊接有防护栏,所述防护栏的右侧壳体内壁设有于踏板滑动连接的自动拉门,所述自动拉门远离防护栏的一侧焊接有齿条,所述齿条的下方设有直齿轮,所述直齿轮远离齿条的一侧固定连接有第一电机,所述第一电机的底部通过螺栓连接在踏板的顶部壳体上,所述防护栏的正面壳体内壁固定连接有电机箱,所述电机箱的底部箱体通过螺栓连接有第二电机。本发明设计新颖,方便对老年人的康复护理进行
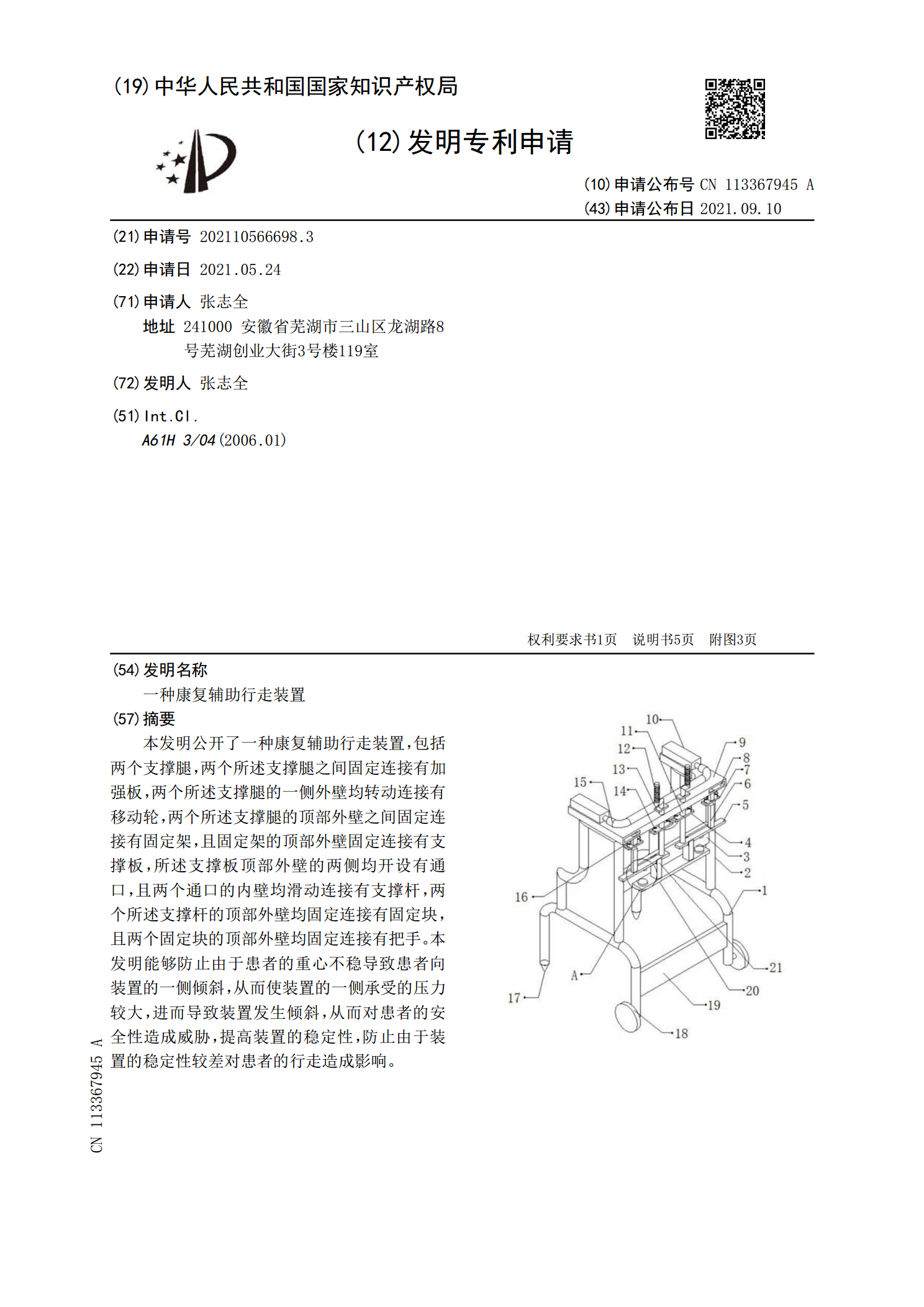
一种康复辅助行走装置.pdf
本发明公开了一种康复辅助行走装置,包括两个支撑腿,两个所述支撑腿之间固定连接有加强板,两个所述支撑腿的一侧外壁均转动连接有移动轮,两个所述支撑腿的顶部外壁之间固定连接有固定架,且固定架的顶部外壁固定连接有支撑板,所述支撑板顶部外壁的两侧均开设有通口,且两个通口的内壁均滑动连接有支撑杆,两个所述支撑杆的顶部外壁均固定连接有固定块,且两个固定块的顶部外壁均固定连接有把手。本发明能够防止由于患者的重心不稳导致患者向装置的一侧倾斜,从而使装置的一侧承受的压力较大,进而导致装置发生倾斜,从而对患者的安全性造成威胁,