
扰动抑制系统.pdf

黛娥****ak

1/10
2/10
3/10
4/10
5/10
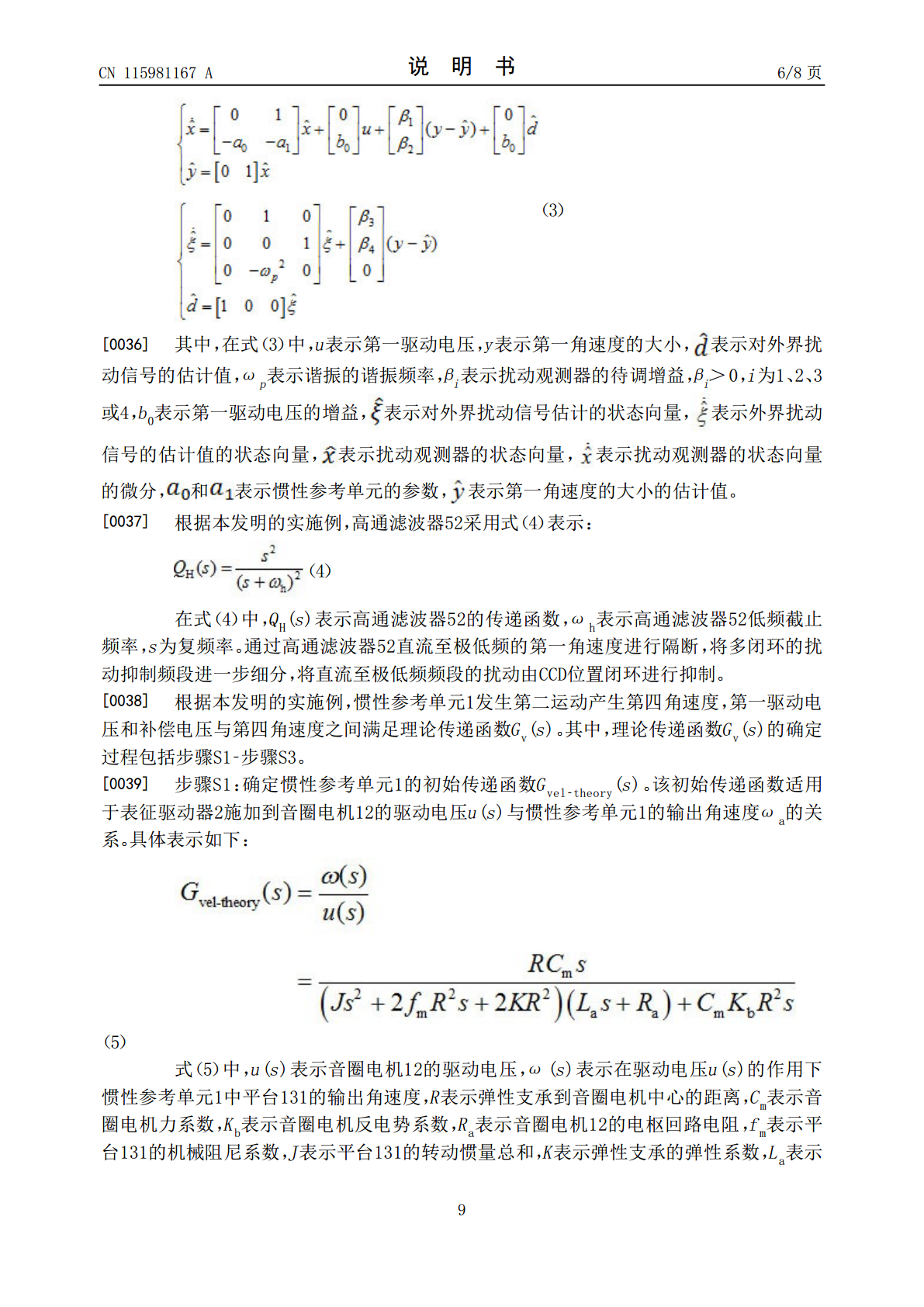
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
扰动抑制系统.pdf
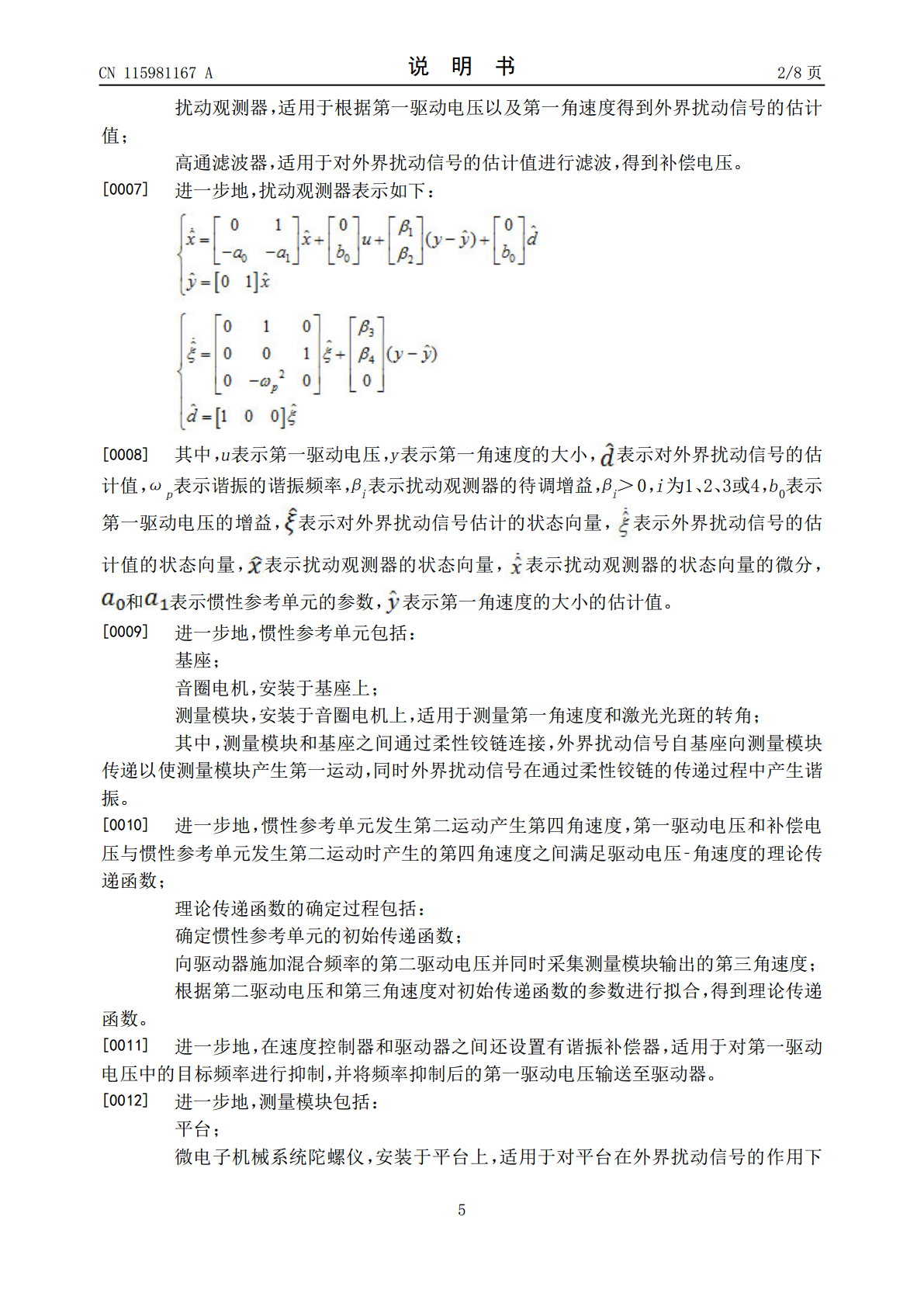
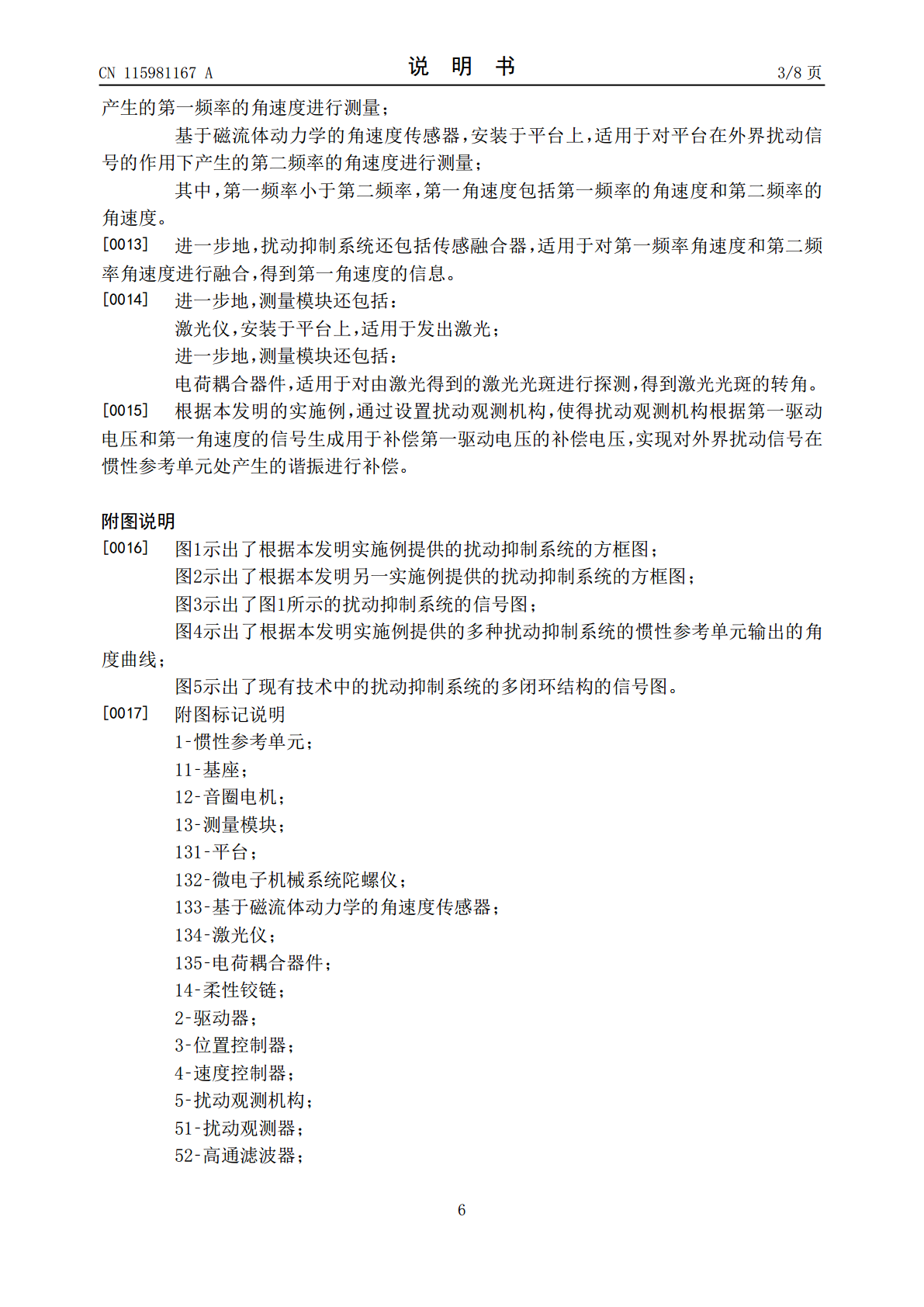
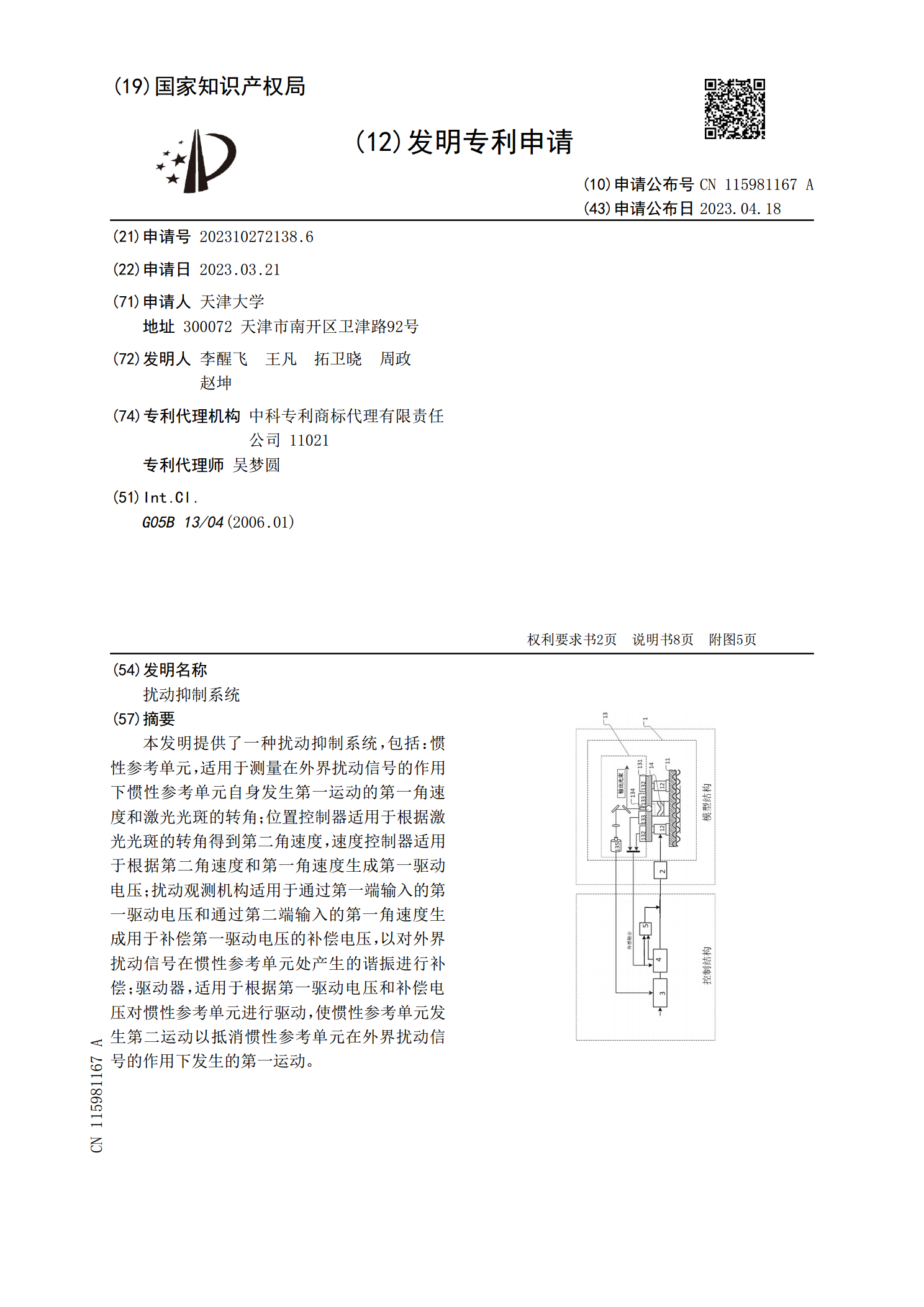
本发明提供了一种扰动抑制系统,包括:惯性参考单元,适用于测量在外界扰动信号的作用下惯性参考单元自身发生第一运动的第一角速度和激光光斑的转角;位置控制器适用于根据激光光斑的转角得到第二角速度,速度控制器适用于根据第二角速度和第一角速度生成第一驱动电压;扰动观测机构适用于通过第一端输入的第一驱动电压和通过第二端输入的第一角速度生成用于补偿第一驱动电压的补偿电压,以对外界扰动信号在惯性参考单元处产生的谐振进行补偿;驱动器,适用于根据第一驱动电压和补偿电压对惯性参考单元进行驱动,使惯性参考单元发生第二运动以抵消惯

一种抑制逆变器并联系统扰动的系统.pdf
一种抑制逆变器并联系统扰动的系统,包括至少两个并联设置的逆变模块,逆变模块包括电源电路、逆变主电路和控制电路。每个逆变模块中均包含有一个自抗扰控制器模块,设置的自抗扰控制器模块能够实时观测系统内部与外部的综合扰动并给予相应补偿,从而使自抗扰控制器模块能够抑制因最大功率点跟踪控制、锁相环以及逆变器侧电感电流存在的误差所带来的扰动以及两个逆变模块之间的扰动,从而控制逆变模块并联系统的扰动为零。本发明结构简单,实现方便,既保留了原有并联系统的特点,又消除了并机扰动;通过观测系统内部与外部的综合扰动并给予相应补偿

一种抑制逆变器并联系统扰动的装置.pdf
一种抑制逆变器并联系统扰动的装置,包括至少两个并联设置的逆变模块,逆变模块包括逆变主电路、采样电路、控制电路。本发明所述的装置结构简单,实现方便,既保留了原有并联系统的特点,又消除了并机扰动。其中的自抗扰控制器能够实时观测系统内部与外部的综合扰动并给予相应补偿,从而使自抗扰控制器能够抑制因采样电路中采样值的偏差对电流、电压所带来的扰动以及逆变模块之间的扰动,从而控制逆变模块并联系统的扰动为零。

基于等价输入干扰补偿的几类典型系统扰动抑制设计.doc
基于等价输入干扰补偿的几类典型系统扰动抑制设计摘要:在电力系统、机械系统等工业过程控制中,外界扰动普遍存在。这些扰动不仅使系统的工作点发生漂移,还会使系统的动态和稳态性能变差。为了抑制扰动对系统的影响,获得良好的鲁棒稳定性和控制性能,许多学者进行了大量的理论和应用研究。然而,现有扰动抑制方法仍存在一定的局限性,例如,控制性能与鲁棒稳定性的折中选择会限制扰动抑制效果;被控对象逆模型的使用易导致不稳定零极点的对消;系统内部耦合参数设计复杂,使控制方法难以实现等。因此,设计更为简便、有效、实用的扰动抑制方法,具
一种基于改进型EID的伺服系统扰动抑制方法.pdf
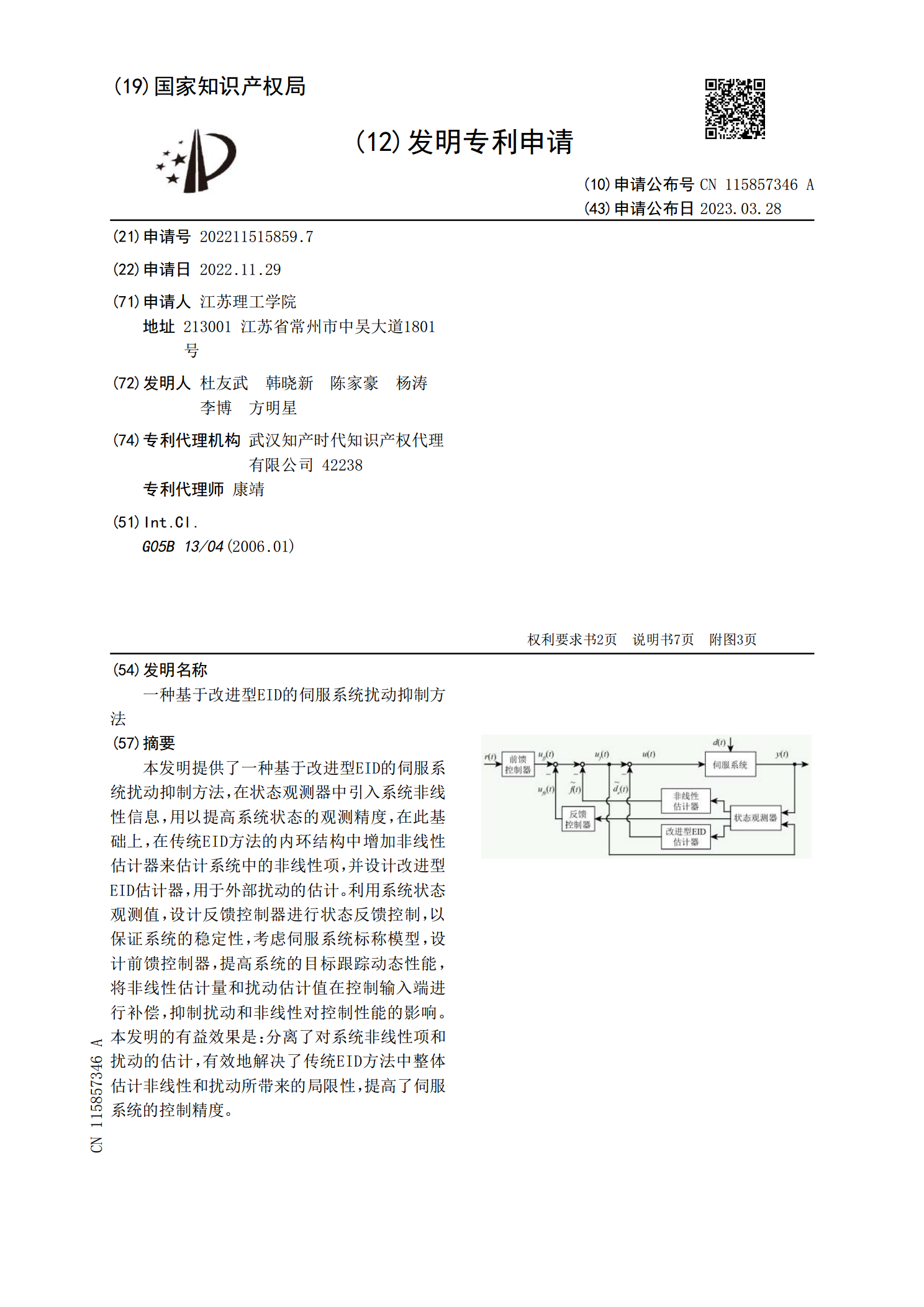
本发明提供了一种基于改进型EID的伺服系统扰动抑制方法,在状态观测器中引入系统非线性信息,用以提高系统状态的观测精度,在此基础上,在传统EID方法的内环结构中增加非线性估计器来估计系统中的非线性项,并设计改进型EID估计器,用于外部扰动的估计。利用系统状态观测值,设计反馈控制器进行状态反馈控制,以保证系统的稳定性,考虑伺服系统标称模型,设计前馈控制器,提高系统的目标跟踪动态性能,将非线性估计量和扰动估计值在控制输入端进行补偿,抑制扰动和非线性对控制性能的影响。本发明的有益效果是:分离了对系统非线性项和扰动