
基于等价输入干扰补偿的几类典型系统扰动抑制设计.doc

青团****青吖


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于等价输入干扰补偿的几类典型系统扰动抑制设计.doc
基于等价输入干扰补偿的几类典型系统扰动抑制设计摘要:在电力系统、机械系统等工业过程控制中,外界扰动普遍存在。这些扰动不仅使系统的工作点发生漂移,还会使系统的动态和稳态性能变差。为了抑制扰动对系统的影响,获得良好的鲁棒稳定性和控制性能,许多学者进行了大量的理论和应用研究。然而,现有扰动抑制方法仍存在一定的局限性,例如,控制性能与鲁棒稳定性的折中选择会限制扰动抑制效果;被控对象逆模型的使用易导致不稳定零极点的对消;系统内部耦合参数设计复杂,使控制方法难以实现等。因此,设计更为简便、有效、实用的扰动抑制方法,具
扰动抑制系统.pdf
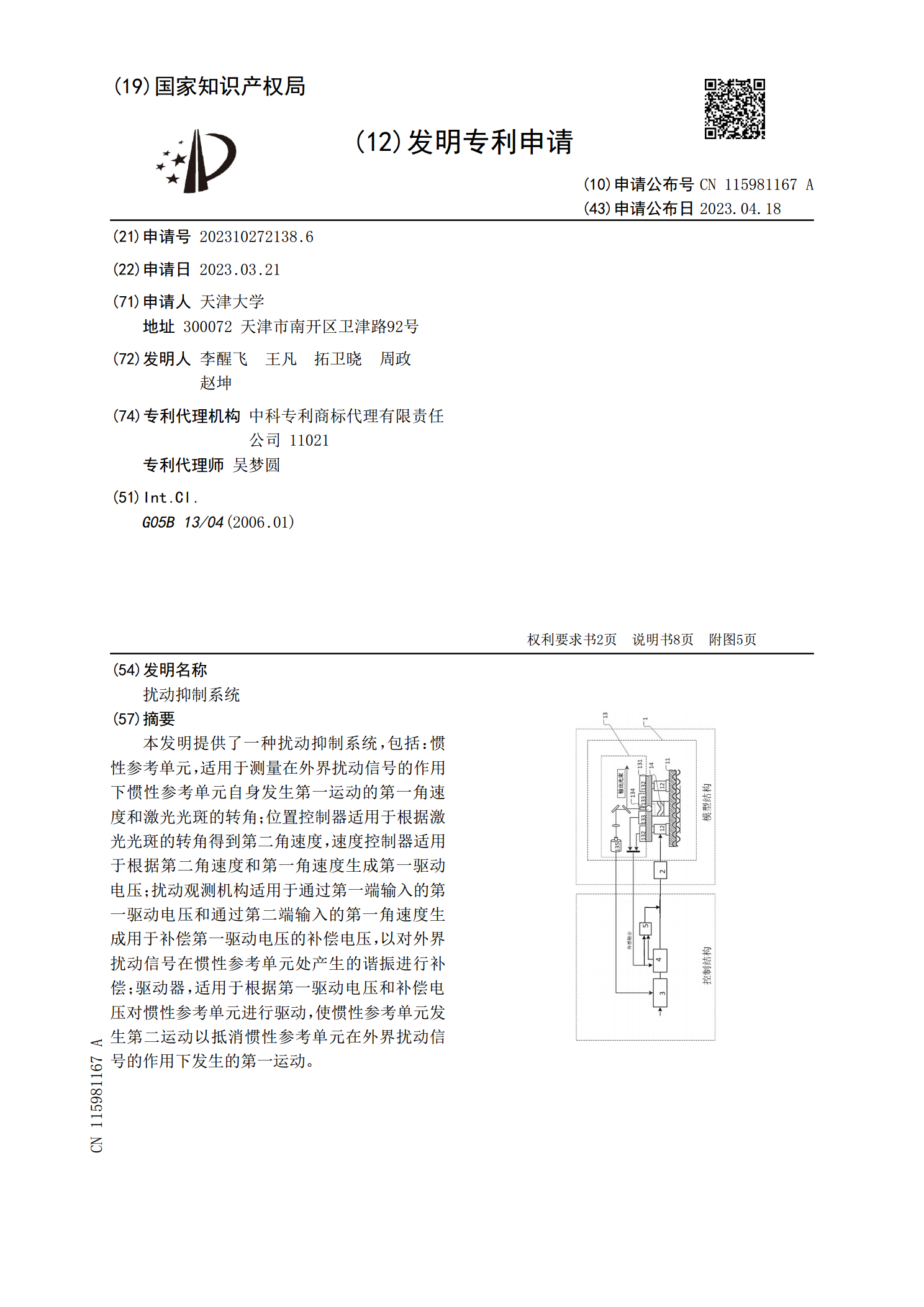
本发明提供了一种扰动抑制系统,包括:惯性参考单元,适用于测量在外界扰动信号的作用下惯性参考单元自身发生第一运动的第一角速度和激光光斑的转角;位置控制器适用于根据激光光斑的转角得到第二角速度,速度控制器适用于根据第二角速度和第一角速度生成第一驱动电压;扰动观测机构适用于通过第一端输入的第一驱动电压和通过第二端输入的第一角速度生成用于补偿第一驱动电压的补偿电压,以对外界扰动信号在惯性参考单元处产生的谐振进行补偿;驱动器,适用于根据第一驱动电压和补偿电压对惯性参考单元进行驱动,使惯性参考单元发生第二运动以抵消惯
基于预编码设计的OFDM系统载频间干扰抑制.pdf
http://www.paper.edu.cnGeneralPrecoderDesignforMitigationofIntercarrierInterferenceinOFDM1MobileSystemsXiaWang*ShihuaZhuSchoolofElectronicsandInformationEngineeringSchoolofElectronicsandInformationEngineeringXi’anJiaotongUniversity,Xi’anJiaotongUniversity
基于盲干扰对齐的小区间干扰抑制方法.pdf
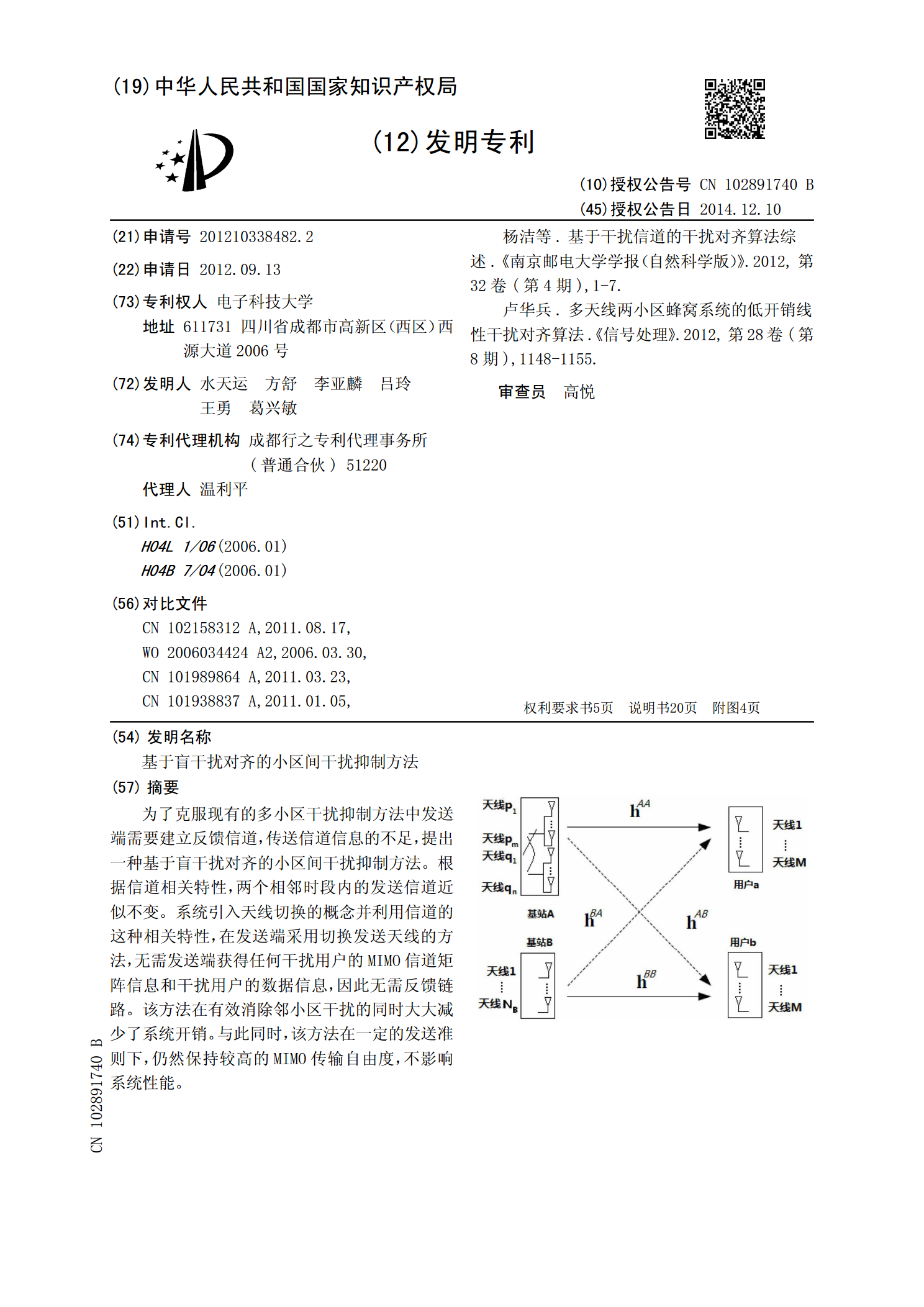
为了克服现有的多小区干扰抑制方法中发送端需要建立反馈信道,传送信道信息的不足,提出一种基于盲干扰对齐的小区间干扰抑制方法。根据信道相关特性,两个相邻时段内的发送信道近似不变。系统引入天线切换的概念并利用信道的这种相关特性,在发送端采用切换发送天线的方法,无需发送端获得任何干扰用户的MIMO信道矩阵信息和干扰用户的数据信息,因此无需反馈链路。该方法在有效消除邻小区干扰的同时大大减少了系统开销。与此同时,该方法在一定的发送准则下,仍然保持较高的MIMO传输自由度,不影响系统性能。
基于扰动补偿的互联电网频率控制方法及系统.pdf
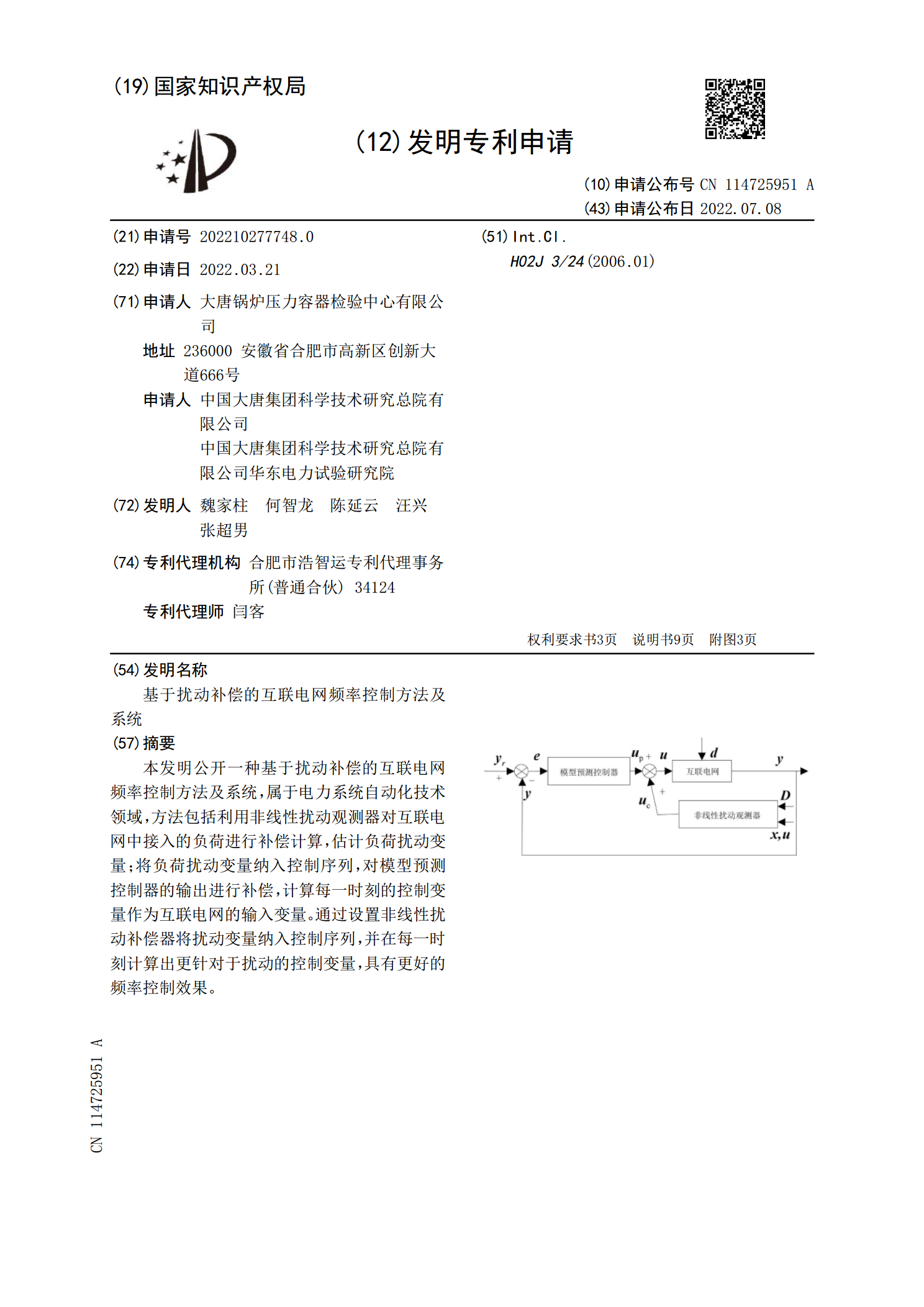
本发明公开一种基于扰动补偿的互联电网频率控制方法及系统,属于电力系统自动化技术领域,方法包括利用非线性扰动观测器对互联电网中接入的负荷进行补偿计算,估计负荷扰动变量;将负荷扰动变量纳入控制序列,对模型预测控制器的输出进行补偿,计算每一时刻的控制变量作为互联电网的输入变量。通过设置非线性扰动补偿器将扰动变量纳入控制序列,并在每一时刻计算出更针对于扰动的控制变量,具有更好的频率控制效果。