
欠驱动并联自对齐踝关节康复机器人及其控制方法.pdf

Ro****44


1/10
2/10

3/10

4/10

5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
欠驱动并联自对齐踝关节康复机器人及其控制方法.pdf
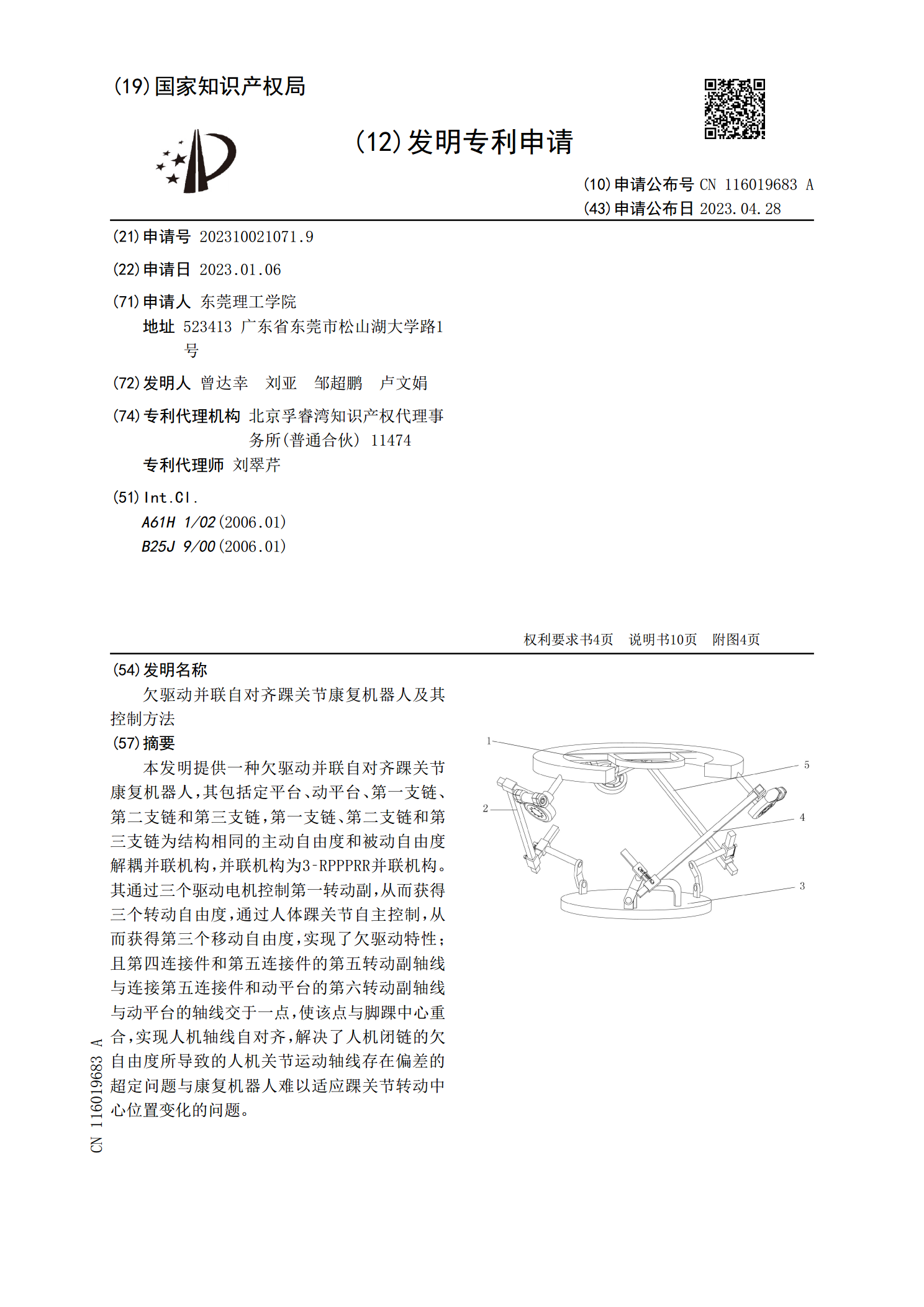
本发明提供一种欠驱动并联自对齐踝关节康复机器人,其包括定平台、动平台、第一支链、第二支链和第三支链,第一支链、第二支链和第三支链为结构相同的主动自由度和被动自由度解耦并联机构,并联机构为3‑RPPPRR并联机构。其通过三个驱动电机控制第一转动副,从而获得三个转动自由度,通过人体踝关节自主控制,从而获得第三个移动自由度,实现了欠驱动特性;且第四连接件和第五连接件的第五转动副轴线与连接第五连接件和动平台的第六转动副轴线与动平台的轴线交于一点,使该点与脚踝中心重合,实现人机轴线自对齐,解决了人机闭链的欠自由度所
一种气动肌肉柔性驱动的并联踝关节康复系统及控制方法.pdf
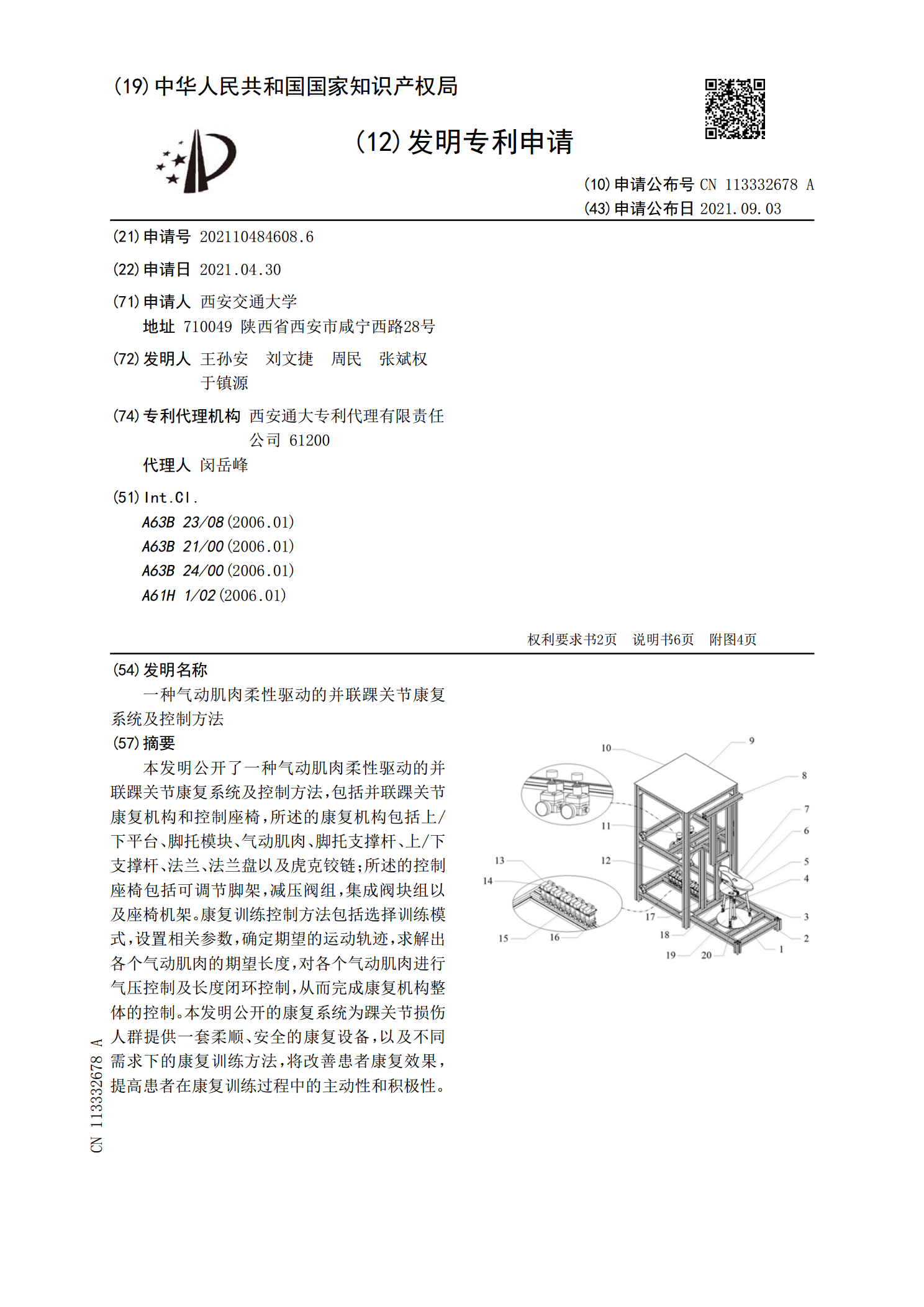
本发明公开了一种气动肌肉柔性驱动的并联踝关节康复系统及控制方法,包括并联踝关节康复机构和控制座椅,所述的康复机构包括上/下平台、脚托模块、气动肌肉、脚托支撑杆、上/下支撑杆、法兰、法兰盘以及虎克铰链;所述的控制座椅包括可调节脚架,减压阀组,集成阀块组以及座椅机架。康复训练控制方法包括选择训练模式,设置相关参数,确定期望的运动轨迹,求解出各个气动肌肉的期望长度,对各个气动肌肉进行气压控制及长度闭环控制,从而完成康复机构整体的控制。本发明公开的康复系统为踝关节损伤人群提供一套柔顺、安全的康复设备,以及不同需求

绳索驱动踝关节康复机器人.pdf
本发明提供一种绳索驱动踝关节康复机器人,包括定平台和动平台。其中定平台起框架支撑作用,4个绳索驱动电动机和旋转驱动电动机固定于其上,可绕垂直轴旋转的绳索过轮保证了绳索方向的随意性;动平台是受刚性约束的绳索牵引平台,具有4个自由度,自由度输出类型为3R1T,其中绳索驱动实现绕矢状轴、冠状轴转动,旋转驱动实现绕垂直轴转动,三个回转副共点,等效出了一个球面副,同时通过滑块导轨实现了移动副的功能。在动平台上脚踏板处引入一个了位置调节装置,用于调整训练者脚掌高度,使机器人等效球面副回转中心与训练者踝关节转动中心相重

八绳驱动并联康复机器人控制方法研究的开题报告.docx
八绳驱动并联康复机器人控制方法研究的开题报告一、选题背景中风、脊髓损伤、脑性瘫痪等疾病常常会导致肌肉、神经和关节的功能障碍,从而影响病人的生活质量。而康复机器人作为一项有效的康复治疗手段,可以提高康复治疗的效率和质量,对病人康复起到重要的作用。因此,开发康复机器人成为当前医疗领域的重要研究方向之一。对于多数肢体功能障碍的病人,需要进行复杂的肢体康复训练。然而,传统康复训练由于难度大、任务重复单调、稳定性差等问题,往往达不到预期的效果。为了解决这一问题,同时缩短康复训练所需的时间和精力,并提高训练效果,本文
柔性绳驱动踝关节康复机器人.pdf
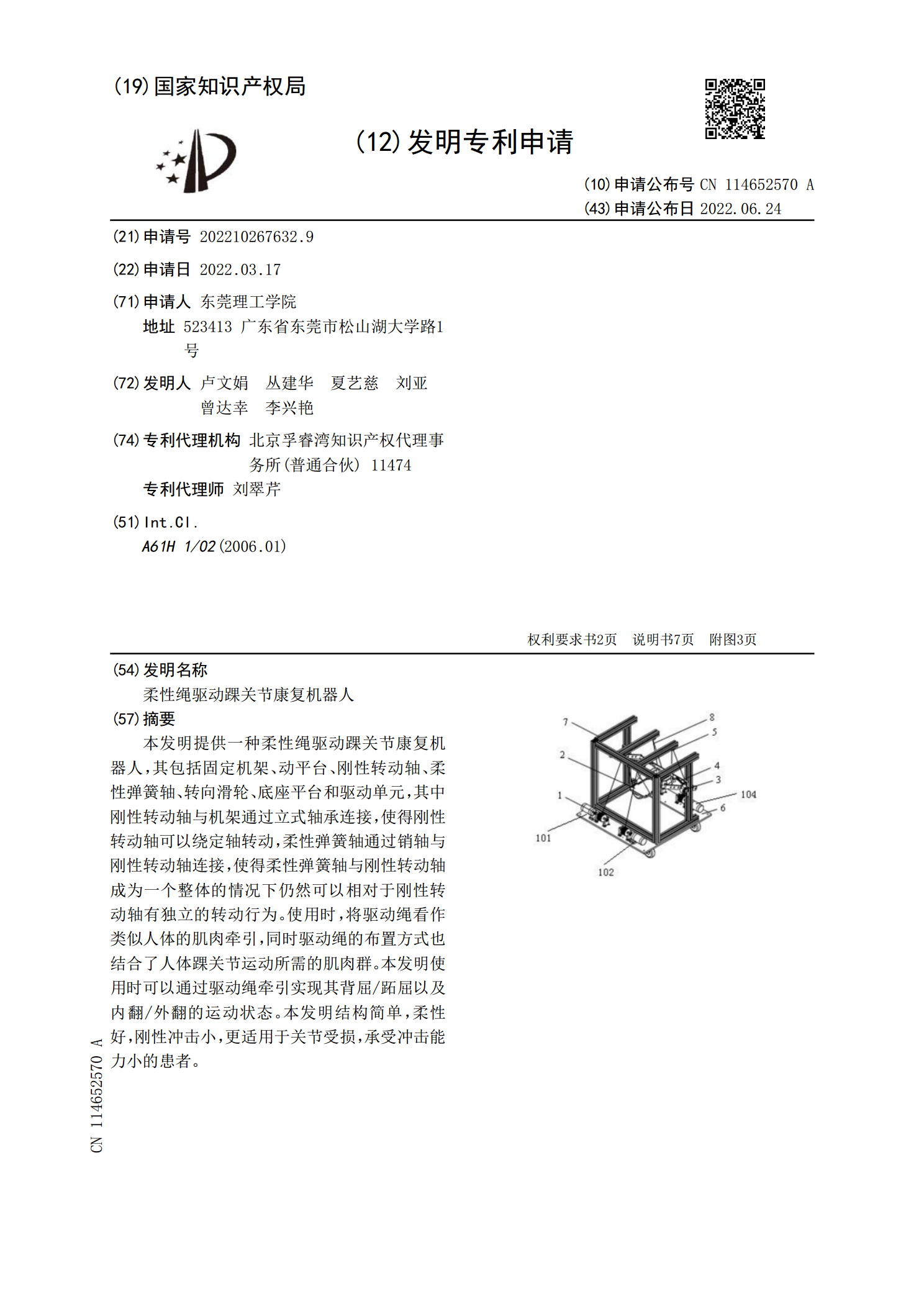
本发明提供一种柔性绳驱动踝关节康复机器人,其包括固定机架、动平台、刚性转动轴、柔性弹簧轴、转向滑轮、底座平台和驱动单元,其中刚性转动轴与机架通过立式轴承连接,使得刚性转动轴可以绕定轴转动,柔性弹簧轴通过销轴与刚性转动轴连接,使得柔性弹簧轴与刚性转动轴成为一个整体的情况下仍然可以相对于刚性转动轴有独立的转动行为。使用时,将驱动绳看作类似人体的肌肉牵引,同时驱动绳的布置方式也结合了人体踝关节运动所需的肌肉群。本发明使用时可以通过驱动绳牵引实现其背屈/跖屈以及内翻/外翻的运动状态。本发明结构简单,柔性好,刚性冲