
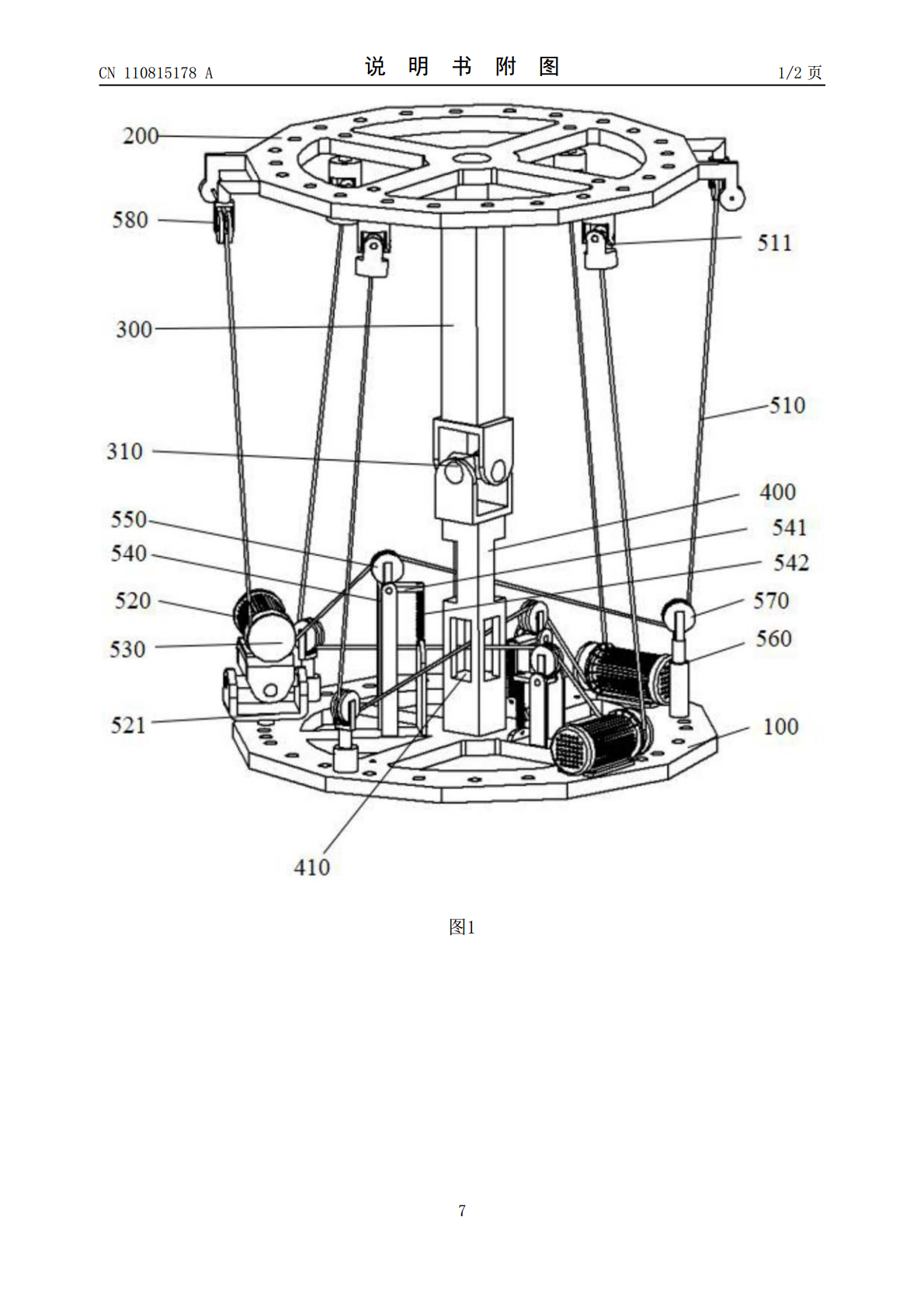
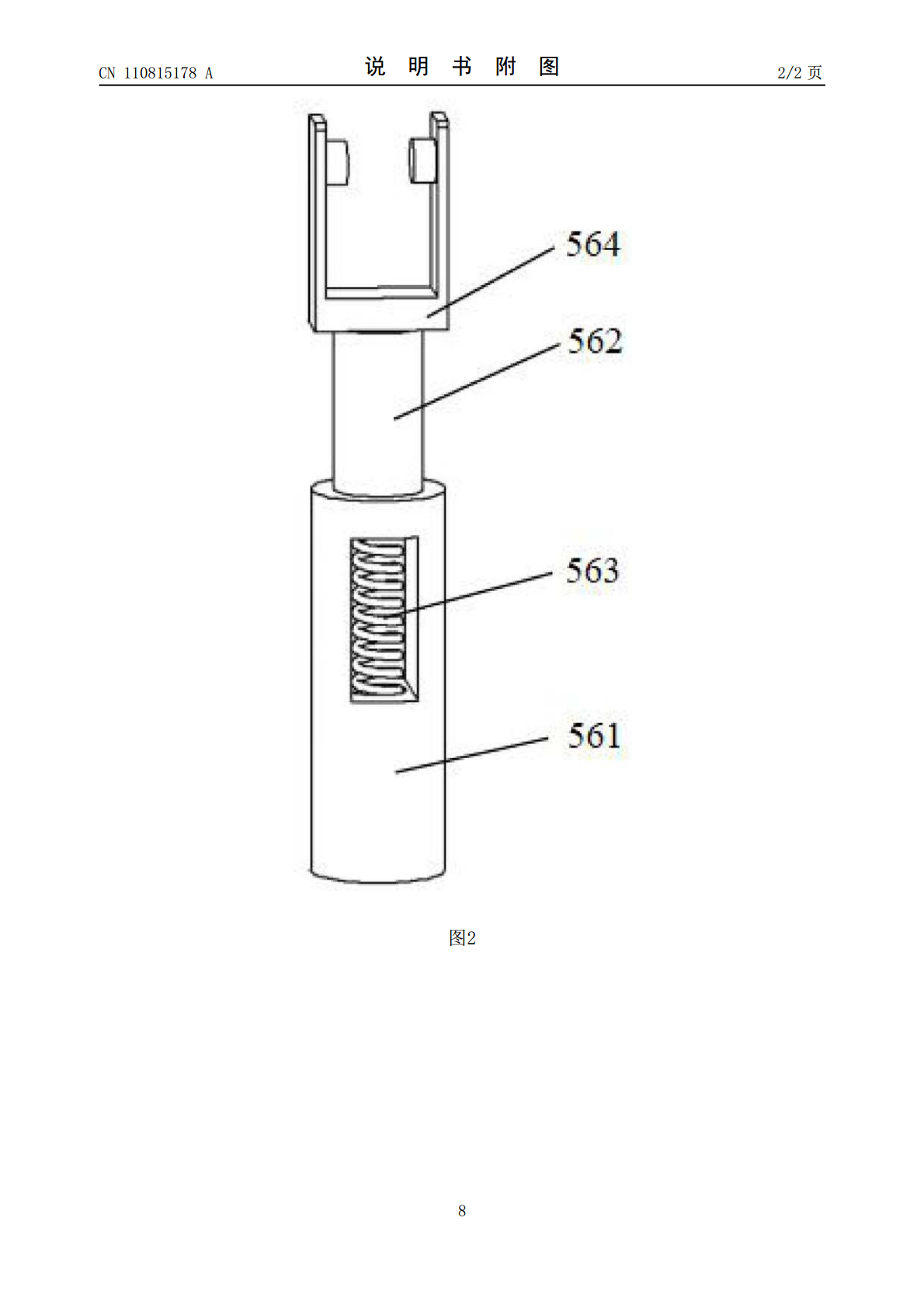
一种绳索驱动的机器人.pdf

努力****冰心

1/8

2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种绳索驱动的机器人.pdf
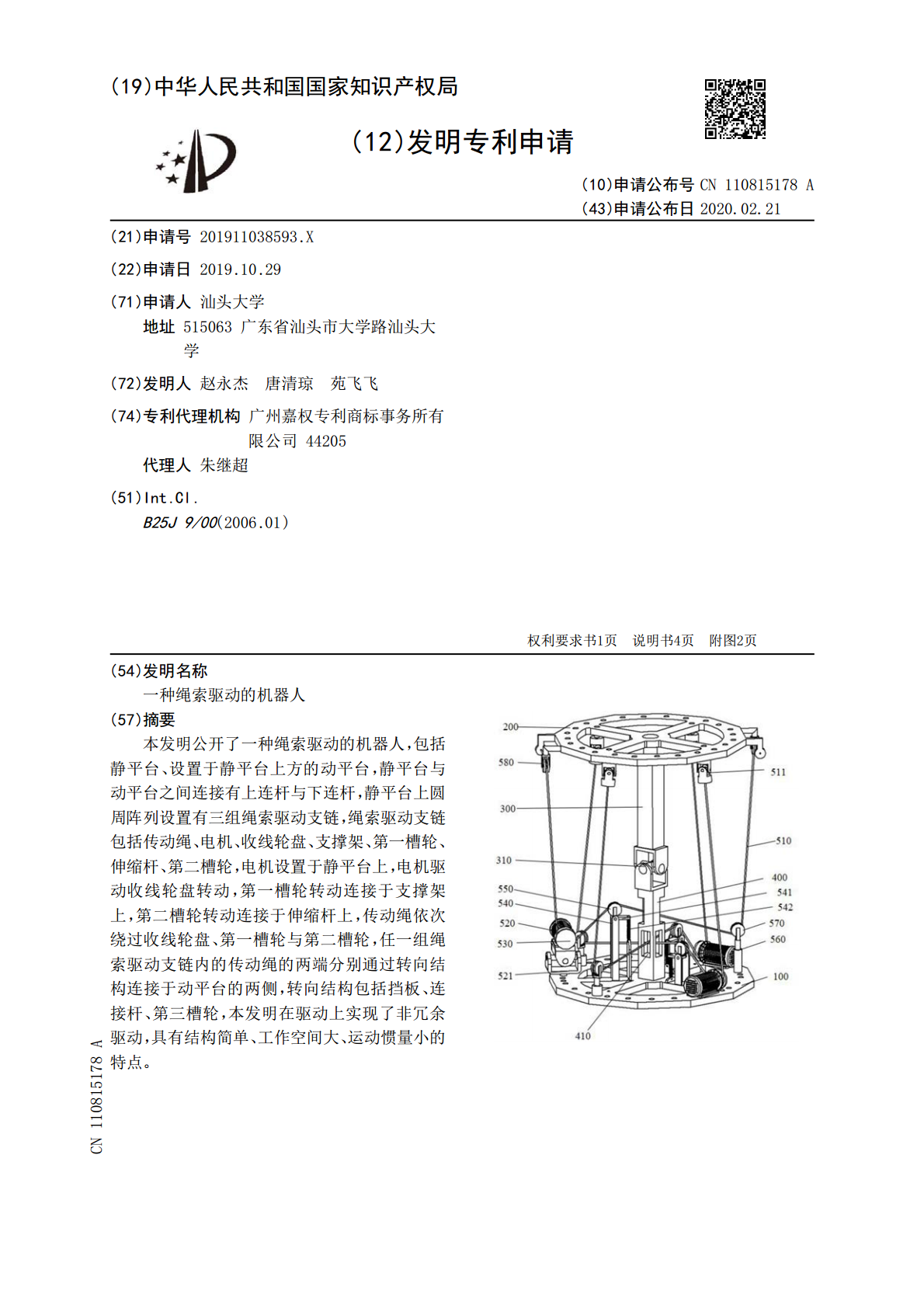
本发明公开了一种绳索驱动的机器人,包括静平台、设置于静平台上方的动平台,静平台与动平台之间连接有上连杆与下连杆,静平台上圆周阵列设置有三组绳索驱动支链,绳索驱动支链包括传动绳、电机、收线轮盘、支撑架、第一槽轮、伸缩杆、第二槽轮,电机设置于静平台上,电机驱动收线轮盘转动,第一槽轮转动连接于支撑架上,第二槽轮转动连接于伸缩杆上,传动绳依次绕过收线轮盘、第一槽轮与第二槽轮,任一组绳索驱动支链内的传动绳的两端分别通过转向结构连接于动平台的两侧,转向结构包括挡板、连接杆、第三槽轮,本发明在驱动上实现了非冗余驱动,具
一种具有绳索驱动脚趾的机器人脚掌.pdf
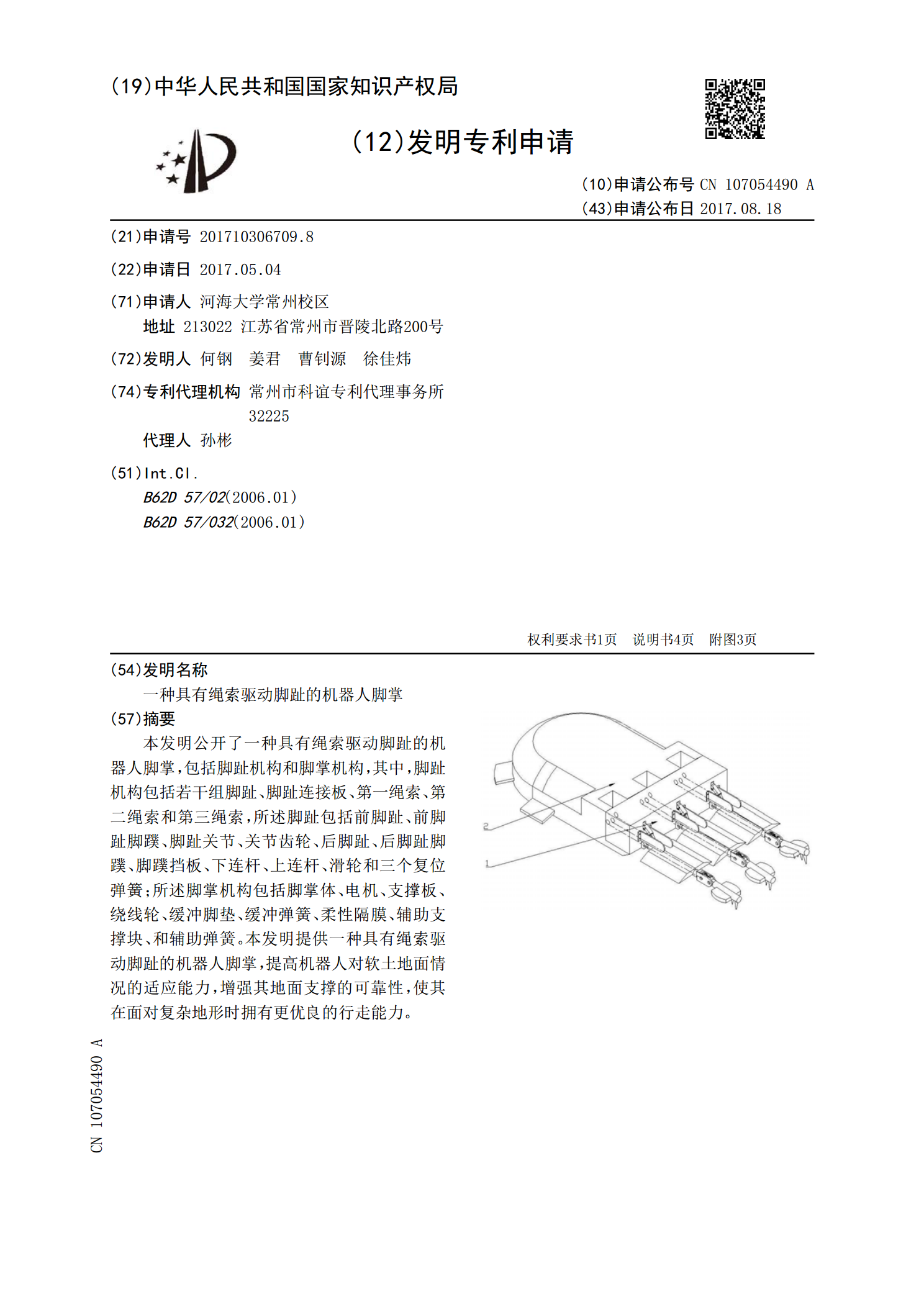
本发明公开了一种具有绳索驱动脚趾的机器人脚掌,包括脚趾机构和脚掌机构,其中,脚趾机构包括若干组脚趾、脚趾连接板、第一绳索、第二绳索和第三绳索,所述脚趾包括前脚趾、前脚趾脚蹼、脚趾关节、关节齿轮、后脚趾、后脚趾脚蹼、脚蹼挡板、下连杆、上连杆、滑轮和三个复位弹簧;所述脚掌机构包括脚掌体、电机、支撑板、绕线轮、缓冲脚垫、缓冲弹簧、柔性隔膜、辅助支撑块、和辅助弹簧。本发明提供一种具有绳索驱动脚趾的机器人脚掌,提高机器人对软土地面情况的适应能力,增强其地面支撑的可靠性,使其在面对复杂地形时拥有更优良的行走能力。
一种基于绳索驱动的上肢康复机器人.pdf
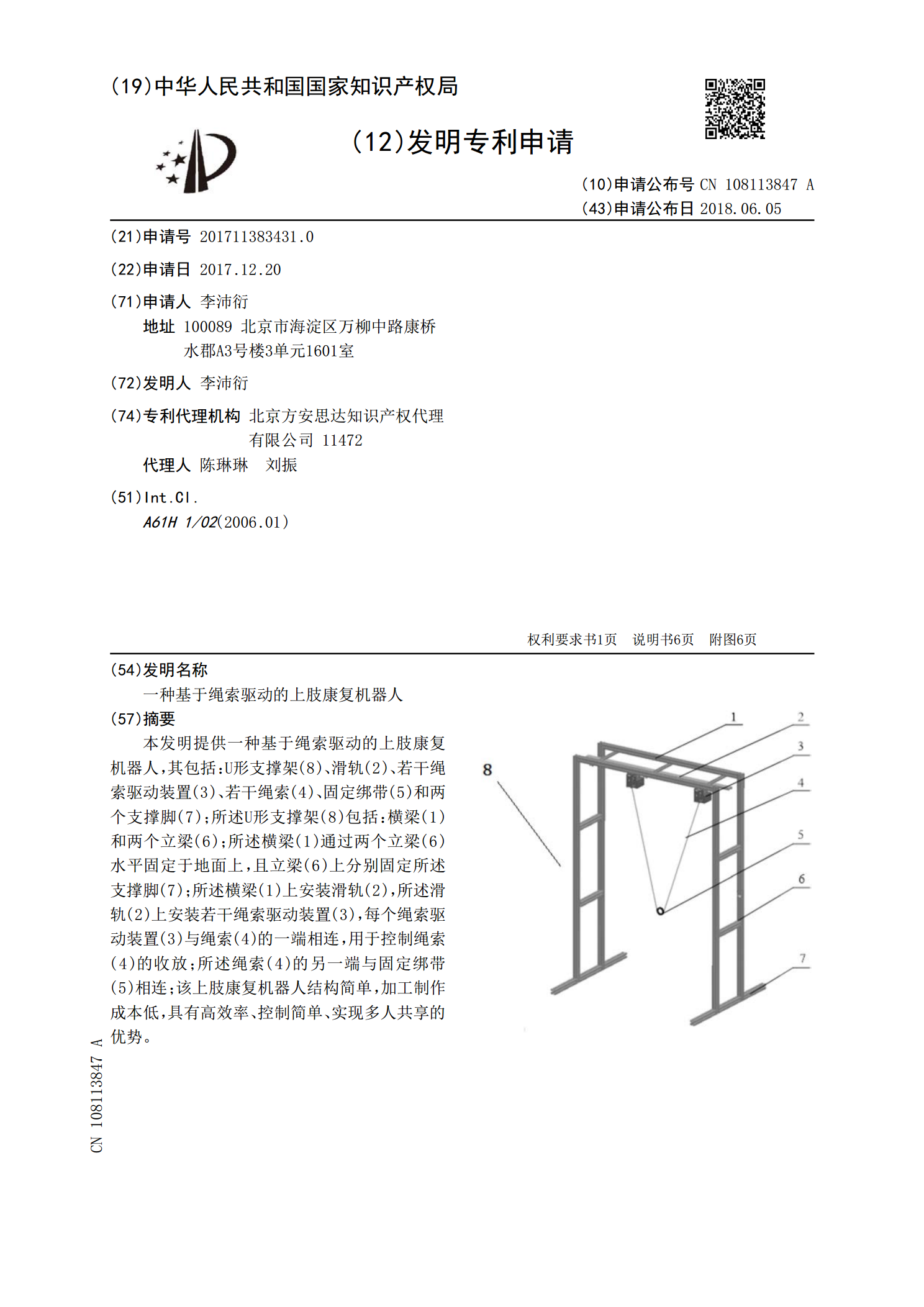
本发明提供一种基于绳索驱动的上肢康复机器人,其包括:U形支撑架(8)、滑轨(2)、若干绳索驱动装置(3)、若干绳索(4)、固定绑带(5)和两个支撑脚(7);所述U形支撑架(8)包括:横梁(1)和两个立梁(6);所述横梁(1)通过两个立梁(6)水平固定于地面上,且立梁(6)上分别固定所述支撑脚(7);所述横梁(1)上安装滑轨(2),所述滑轨(2)上安装若干绳索驱动装置(3),每个绳索驱动装置(3)与绳索(4)的一端相连,用于控制绳索(4)的收放;所述绳索(4)的另一端与固定绑带(5)相连;该上肢康复机器人结

一种绳索驱动装置及绳驱并联机器人.pdf
本发明涉及机器人技术领域,公开了一种绳索驱动装置以及并联绳驱机器人。本发明的绳索驱动装置包括主体框架、固设于所述主体框架上的驱动装置、与所述驱动装置连接并同步转动的丝杆与铰轮、与所述丝杆螺纹连接的导绳滑块以及一端固定设于所述铰轮的上的控制绳索;其中,所述铰轮上设有供所述控制绳索绕卷的螺纹槽,所述导绳滑块上设有第一导绳滑轮,所述第一导绳滑轮将所述控制绳索张紧并使所述控制绳索定向绕入所述螺纹槽内。本发明的并联绳驱机器人包括机器人主体以及固设于机器人主体上的绳索驱动装置。本发明的绳索驱动装置以及并联绳驱机器人能

绳索驱动踝关节康复机器人.pdf
本发明提供一种绳索驱动踝关节康复机器人,包括定平台和动平台。其中定平台起框架支撑作用,4个绳索驱动电动机和旋转驱动电动机固定于其上,可绕垂直轴旋转的绳索过轮保证了绳索方向的随意性;动平台是受刚性约束的绳索牵引平台,具有4个自由度,自由度输出类型为3R1T,其中绳索驱动实现绕矢状轴、冠状轴转动,旋转驱动实现绕垂直轴转动,三个回转副共点,等效出了一个球面副,同时通过滑块导轨实现了移动副的功能。在动平台上脚踏板处引入一个了位置调节装置,用于调整训练者脚掌高度,使机器人等效球面副回转中心与训练者踝关节转动中心相重