
一种AGV叉车和叉臂搬货的方法.pdf

雨巷****珺琦


1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种AGV叉车和叉臂搬货的方法.pdf
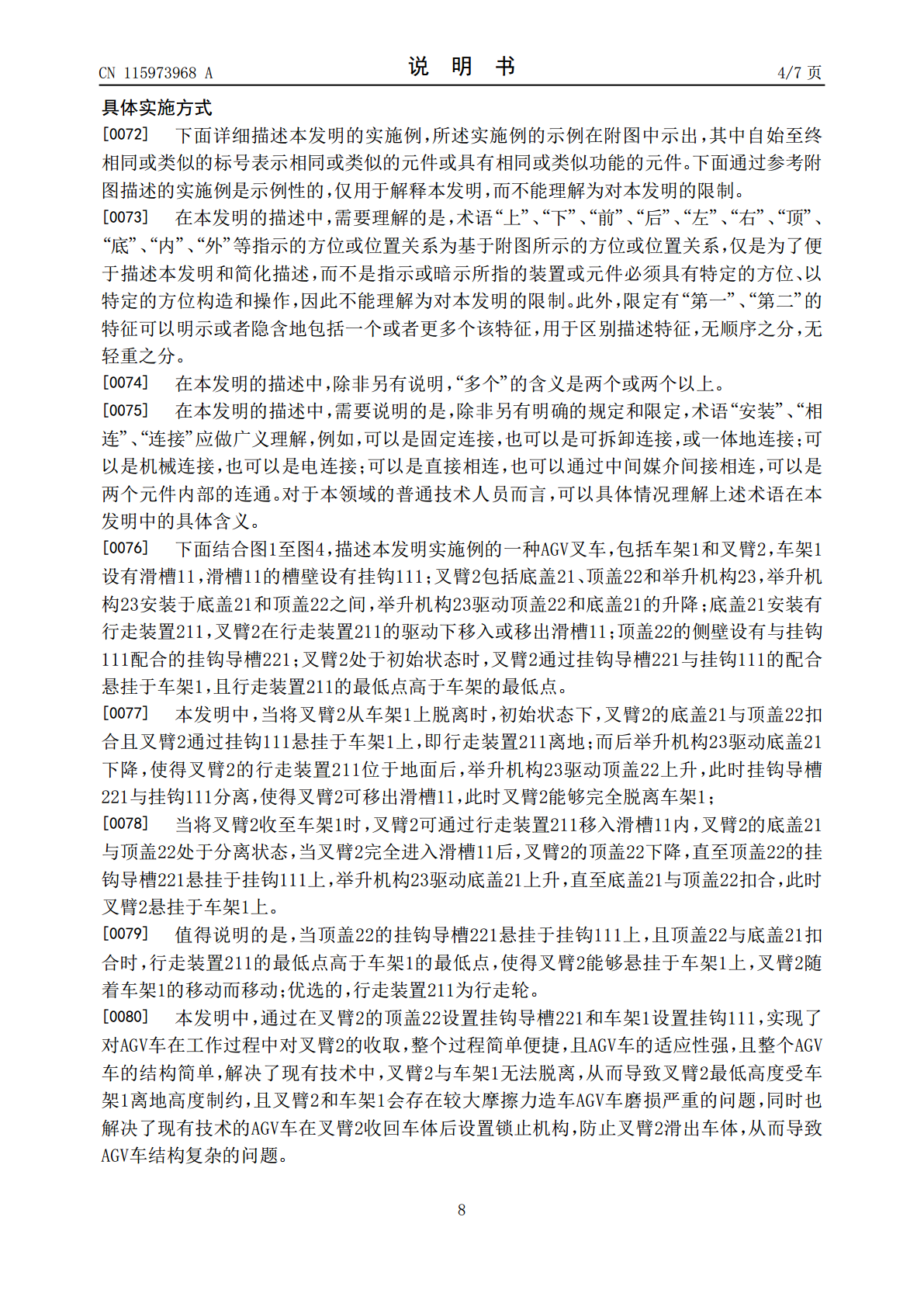
一种AGV叉车和叉臂搬货的方法,包括车架和叉臂,车架设有滑槽,滑槽的槽壁设有挂钩;叉臂包括底盖、顶盖和举升机构,举升机构安装于底盖和顶盖之间,举升机构驱动顶盖和底盖的升降;底盖安装有行走装置,叉臂在行走装置的驱动下移入或移出滑槽;顶盖的侧壁设有与挂钩配合的挂钩导槽;解决了现有技术中,叉臂与车架无法脱离,从而导致叉臂最低高度受车架离地高度制约,且叉臂和车架会存在较大摩擦力造车AGV车磨损严重的问题,同时也解决了现有技术的AGV车在叉臂收回车体后设置锁止机构,防止叉臂滑出车体,从而导致AGV车结构复杂的问题。

一种新型货叉臂以及叉车货叉.pdf
本发明涉及工业物料搬运机械技术领域,具体涉及一种新型货叉臂以及叉车货叉,整体为“L”形,所述货叉臂沿水平端开设有长条形沟槽,所述沟槽内沿同一水平线设置有若干同步轴,所述同步轴上安装有同步带轮,所述同步带轮上设置有同步带,所述货叉臂水平端的前端斜向安装有一垫块,所述同步轴的数目为4-7个,所述货叉臂弯折处还开设有安装孔,用于安装液压马达,所述货叉臂与垫块之间设置有缓冲区域。本发明的有益效果是:提供了一种新型货叉臂以及叉车货叉,对一般货叉进行改进,在货叉臂前端设置斜向垫块,在货叉臂上安装有同步带,经由同步带装
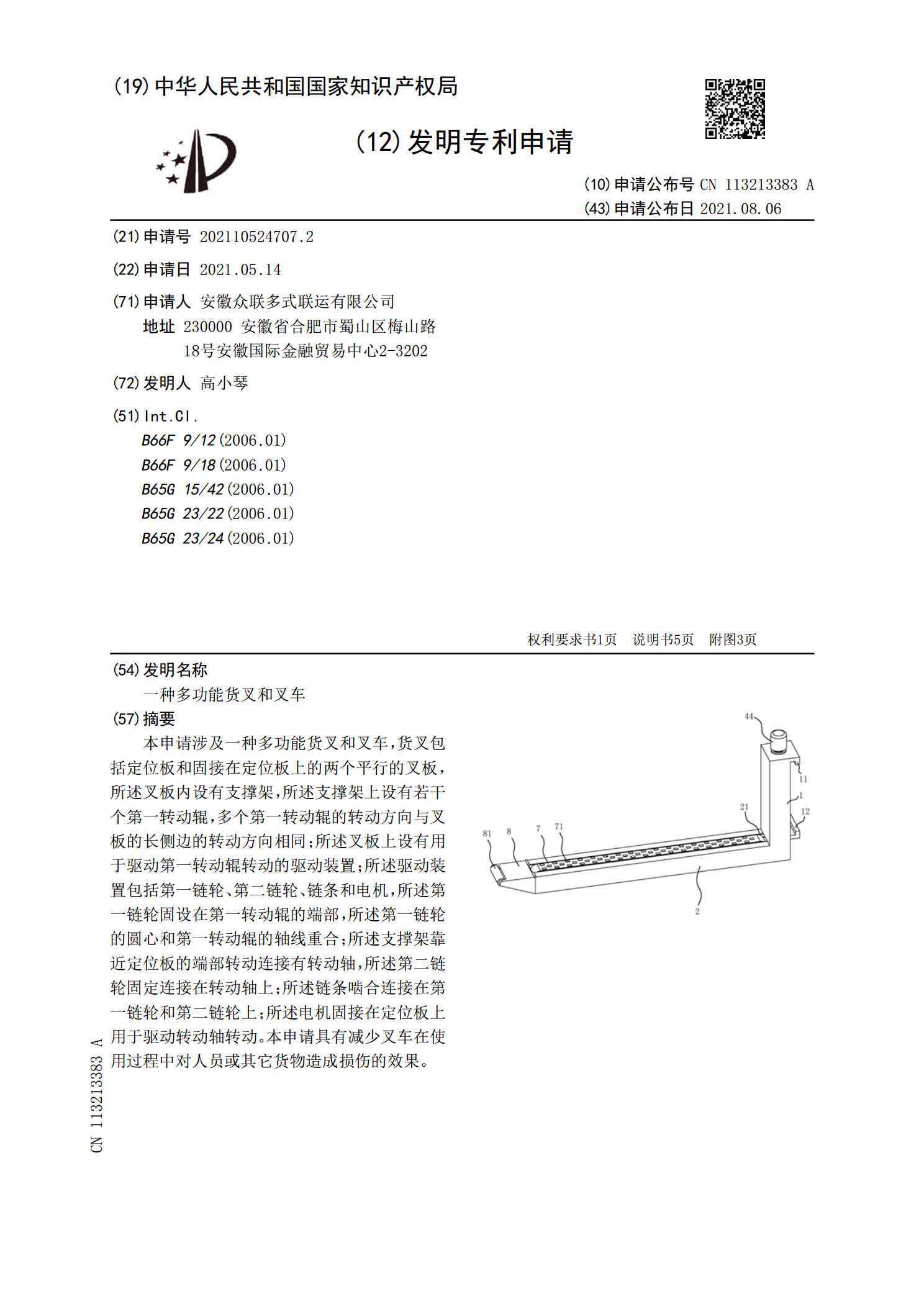
一种多功能货叉和叉车.pdf
本申请涉及一种多功能货叉和叉车,货叉包括定位板和固接在定位板上的两个平行的叉板,所述叉板内设有支撑架,所述支撑架上设有若干个第一转动辊,多个第一转动辊的转动方向与叉板的长侧边的转动方向相同;所述叉板上设有用于驱动第一转动辊转动的驱动装置;所述驱动装置包括第一链轮、第二链轮、链条和电机,所述第一链轮固设在第一转动辊的端部,所述第一链轮的圆心和第一转动辊的轴线重合;所述支撑架靠近定位板的端部转动连接有转动轴,所述第二链轮固定连接在转动轴上;所述链条啮合连接在第一链轮和第二链轮上;所述电机固接在定位板上用于驱动

一种货叉装置和搬送设备.pdf
本发明涉及建筑机械领域,公开一种货叉装置和搬送设备。其中货叉装置包括机架;基础货叉,与机架滑动连接;旋转支撑件,包括脚轮,旋转支撑件转动设置于基础货叉上;以及起重货叉,与机架连接,起重货叉与机架能够相对基础货叉同步升降;当起重货叉相对基础货叉上升时,起重货叉能够与旋转支撑件抵接并驱动旋转支撑件转动,以带动脚轮向下运动至支撑位置,当起重货叉相对基础货叉下降时,起重货叉能够与旋转支撑件抵接并驱动旋转支撑件转动,以带动脚轮向上运动至收回位置。本发明提供的货叉装置能够在提高承载能力的同时,保证货叉装置的结构简单紧

一种叉车及其叉臂.pdf
本发明公开了一种叉臂,包括叉臂架、第一直线驱动装置、第二直线驱动装置、第一支撑架、第二支撑架和叉臂本体,其中,第一支撑架固定在叉臂架上,第二支撑架包括固定连接的上支撑架和下支撑架,上支撑架可前后滑动的设置在第一支撑架上,叉臂本体可左右滑动的设置在下支撑架上,第一直线驱动装置设置在叉臂架上,其驱动端与上支撑架连接,第二直线驱动装置设置在下支撑架上,其驱动端与叉臂本体连接;叉臂本体包括第一子叉臂和第二子叉臂,第一子叉臂和第二子叉臂均可滑动的设置在下支撑架上,第二直线驱动装置与第一子叉臂连接,第一子叉臂与第二子