
一种基于双机器人主从协同的微装配操作系统.pdf

王秋****哥哥

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于双机器人主从协同的微装配操作系统.pdf
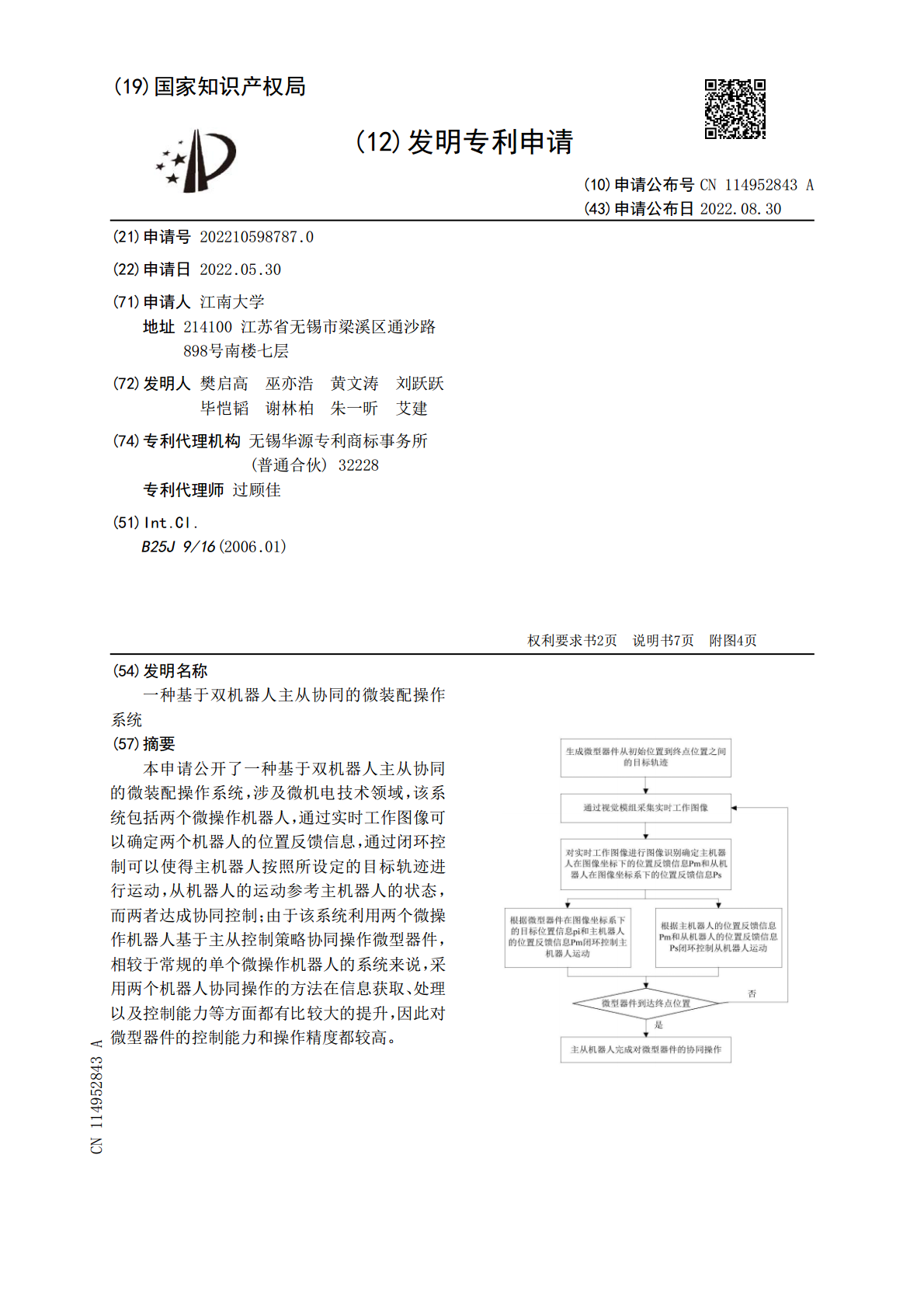
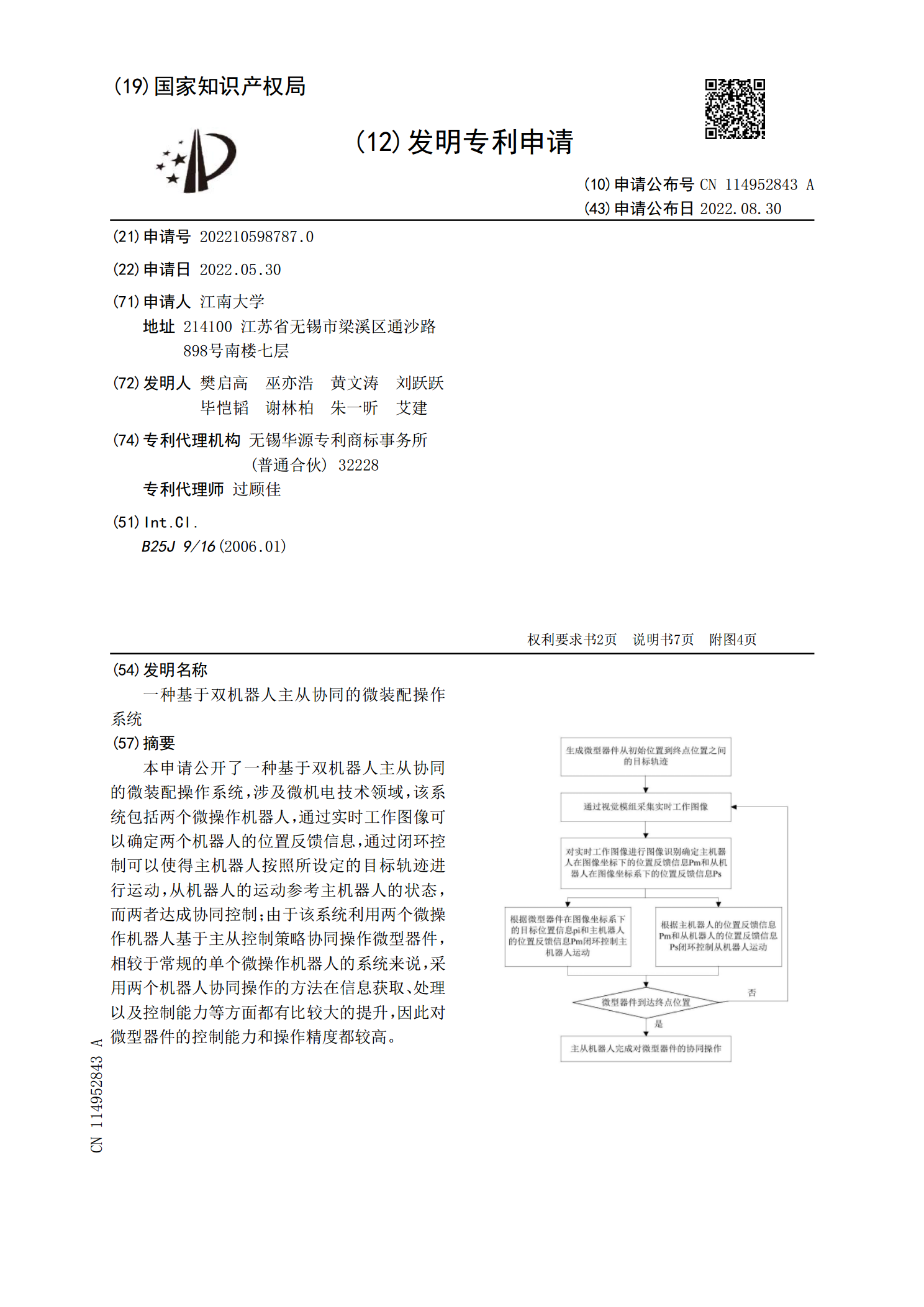
本申请公开了一种基于双机器人主从协同的微装配操作系统,涉及微机电技术领域,该系统包括两个微操作机器人,通过实时工作图像可以确定两个机器人的位置反馈信息,通过闭环控制可以使得主机器人按照所设定的目标轨迹进行运动,从机器人的运动参考主机器人的状态,而两者达成协同控制;由于该系统利用两个微操作机器人基于主从控制策略协同操作微型器件,相较于常规的单个微操作机器人的系统来说,采用两个机器人协同操作的方法在信息获取、处理以及控制能力等方面都有比较大的提升,因此对微型器件的控制能力和操作精度都较高。

基于主从结构的多水下机器人协同路径规划.docx
基于主从结构的多水下机器人协同路径规划随着水下机器人技术的快速发展,越来越多的水下机器人被应用于水下勘探、水下救援等领域。在实际应用中,多个水下机器人进行协同任务具有重要意义。然而,在水下环境中进行协同任务面临许多困难和挑战,如水下通信不稳定、水下障碍物避免等问题。因此,如何实现多水下机器人的协同路径规划已成为一个研究热点。目前,主从结构被广泛应用于多水下机器人协同任务中。主从结构指的是在机器人群体中,一台机器人被指定为主机,其余机器人被指定为从机。主机负责整个群体的路径规划和控制,从机负责在主机的指令下
一种基于微源与负载协同支撑的多能互补微电网多主从控制结构及方法.pdf
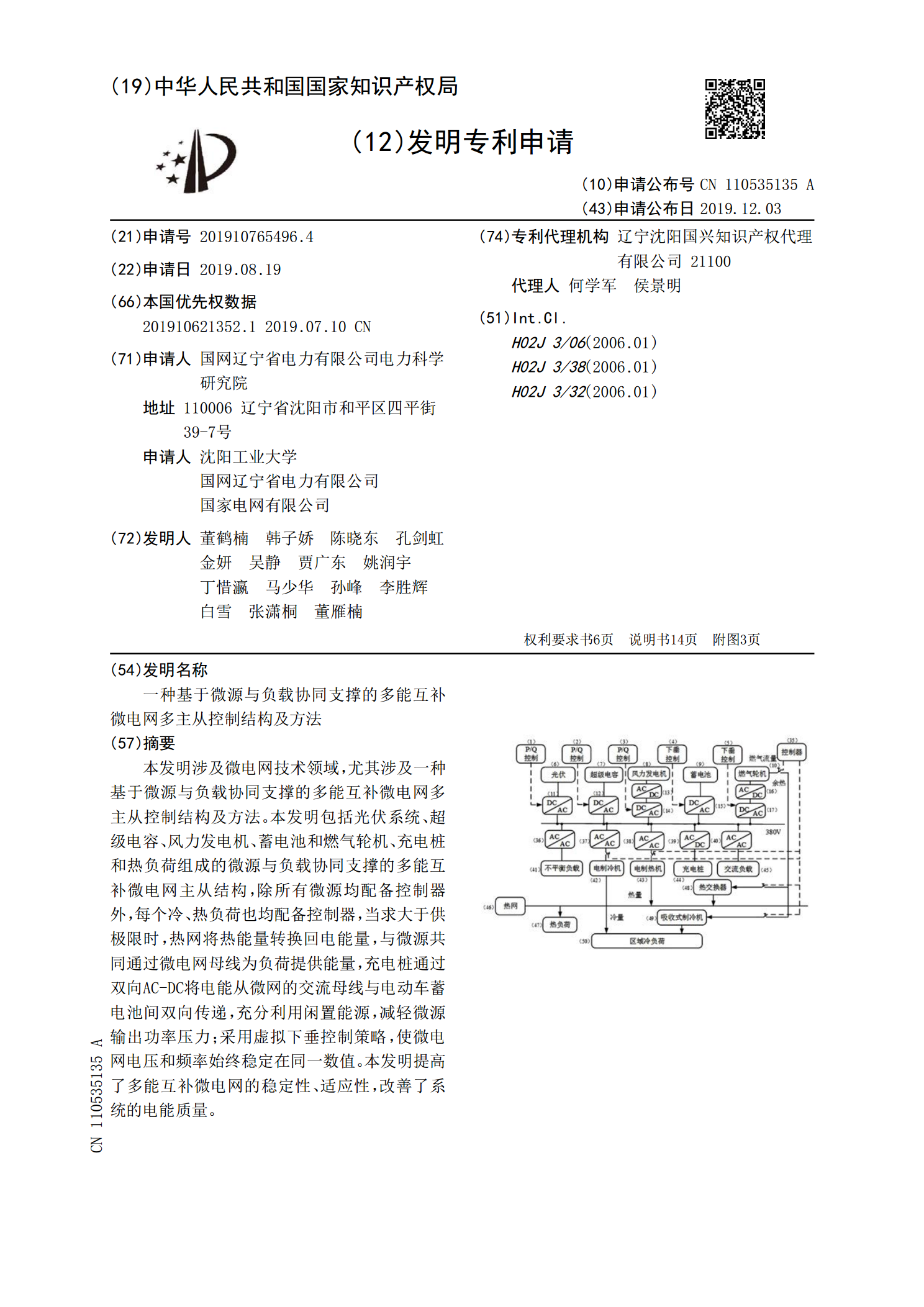
本发明涉及微电网技术领域,尤其涉及一种基于微源与负载协同支撑的多能互补微电网多主从控制结构及方法。本发明包括光伏系统、超级电容、风力发电机、蓄电池和燃气轮机、充电桩和热负荷组成的微源与负载协同支撑的多能互补微电网主从结构,除所有微源均配备控制器外,每个冷、热负荷也均配备控制器,当求大于供极限时,热网将热能量转换回电能量,与微源共同通过微电网母线为负荷提供能量,充电桩通过双向AC‑DC将电能从微网的交流母线与电动车蓄电池间双向传递,充分利用闲置能源,减轻微源输出功率压力;采用虚拟下垂控制策略,使微电网电压和

具有多维力反馈的微创手术机器人主从操作系统的研究的任务书.docx
具有多维力反馈的微创手术机器人主从操作系统的研究的任务书任务书一、研究背景近年来,随着科技的发展和手术技术的不断进步,微创手术已经逐渐成为了临床医学中的一项重要技术。微创手术的优点主要有:切口小、出血量少、术后恢复快等,所以微创手术减少了手术创伤,使得患者能够更快地恢复。微创手术需要高端技术和高精度设备的支持,手术机器人是一种新兴的手术辅助设备,其可实现对患者的微创操作,具有较高的准确性和精度,这对于精细手术和复杂手术非常重要。当前,手术机器人已经有很多商用型,但是存在一些问题,例如操作难度大、操作效率低
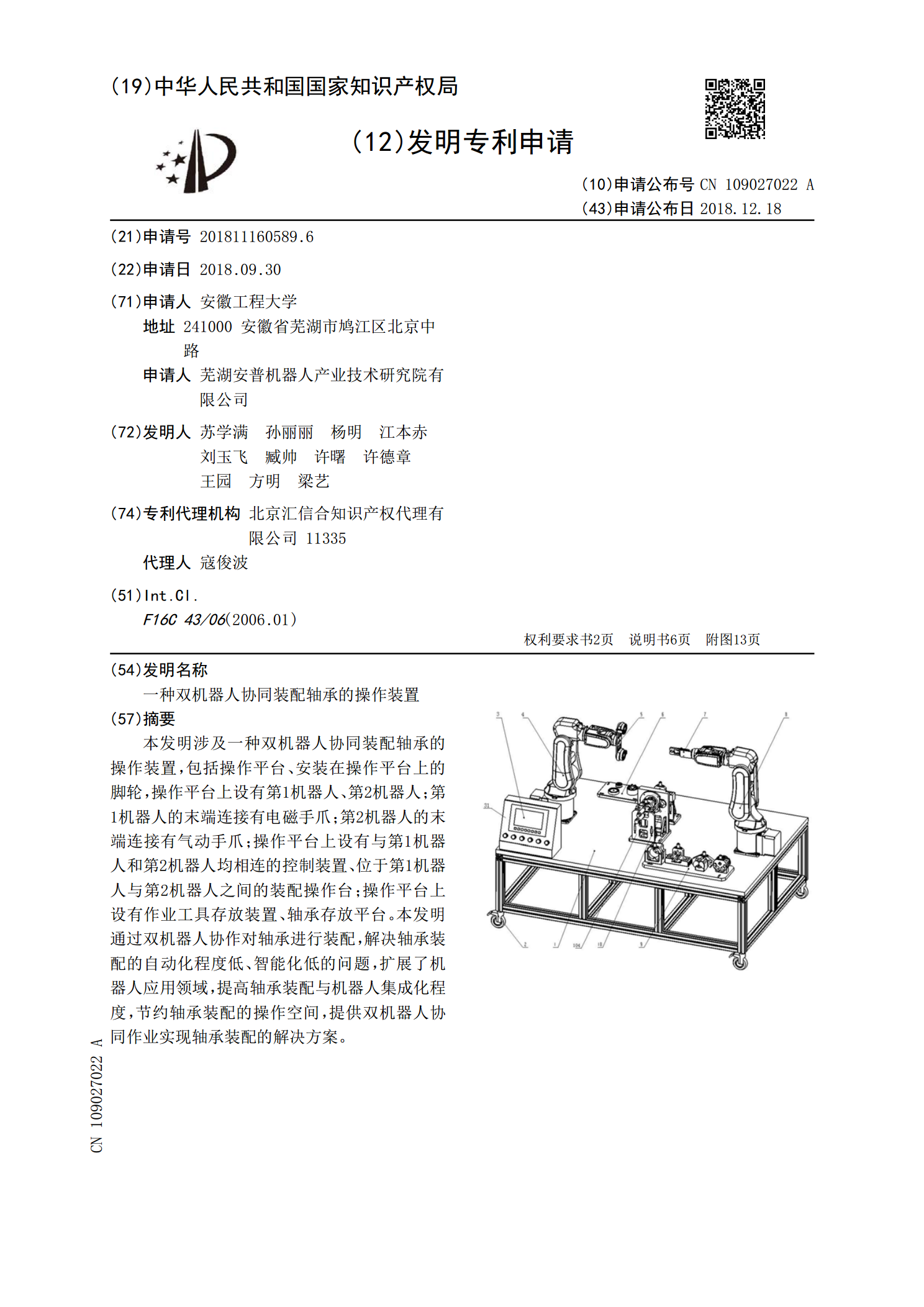
一种双机器人协同装配轴承的操作装置.pdf
本发明涉及一种双机器人协同装配轴承的操作装置,包括操作平台、安装在操作平台上的脚轮,操作平台上设有第1机器人、第2机器人;第1机器人的末端连接有电磁手爪;第2机器人的末端连接有气动手爪;操作平台上设有与第1机器人和第2机器人均相连的控制装置、位于第1机器人与第2机器人之间的装配操作台;操作平台上设有作业工具存放装置、轴承存放平台。本发明通过双机器人协作对轴承进行装配,解决轴承装配的自动化程度低、智能化低的问题,扩展了机器人应用领域,提高轴承装配与机器人集成化程度,节约轴承装配的操作空间,提供双机器人协同作