
电池模组的堆叠系统及堆叠方法.pdf

音景****ka

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

电池模组的堆叠系统及堆叠方法.pdf
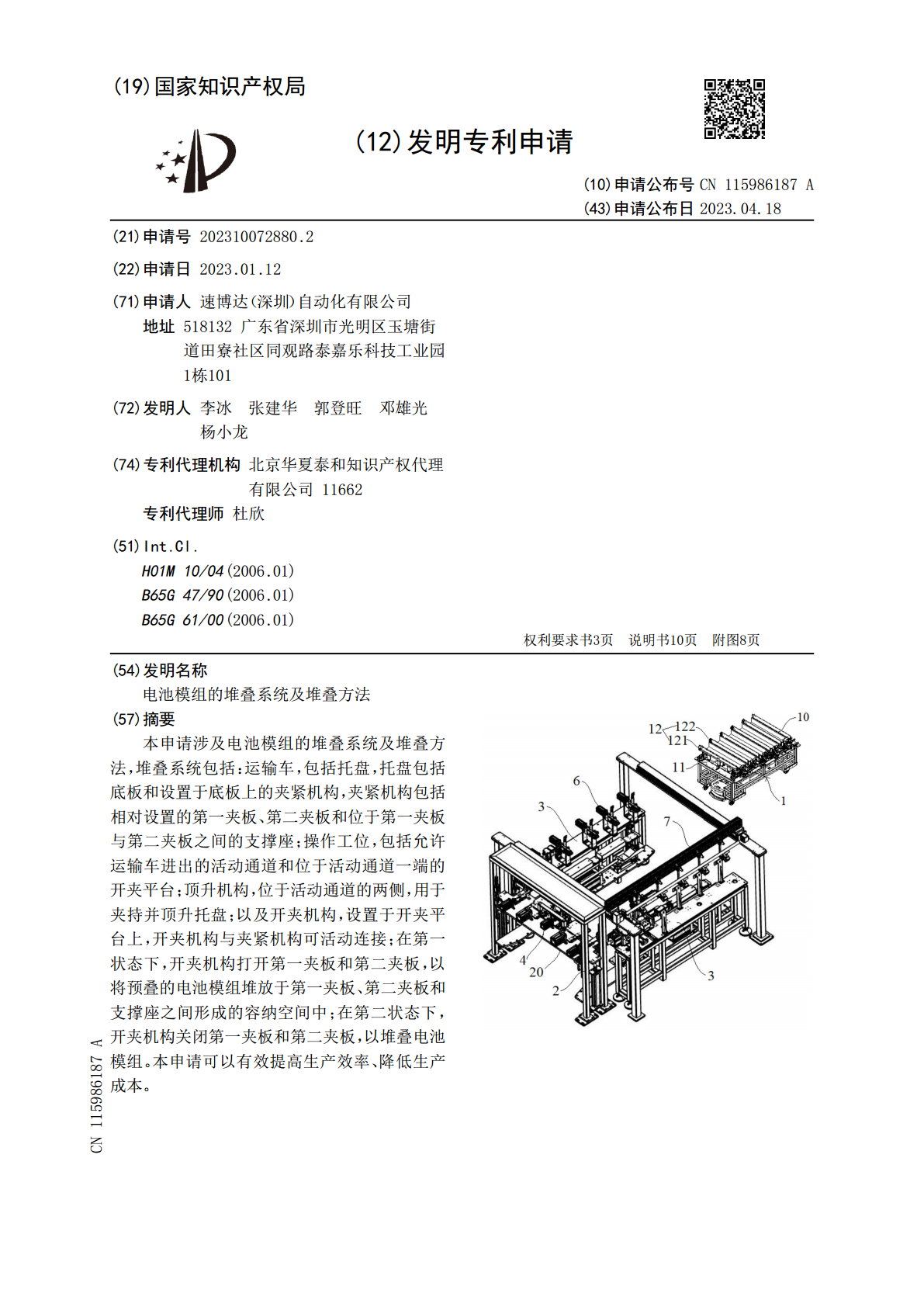
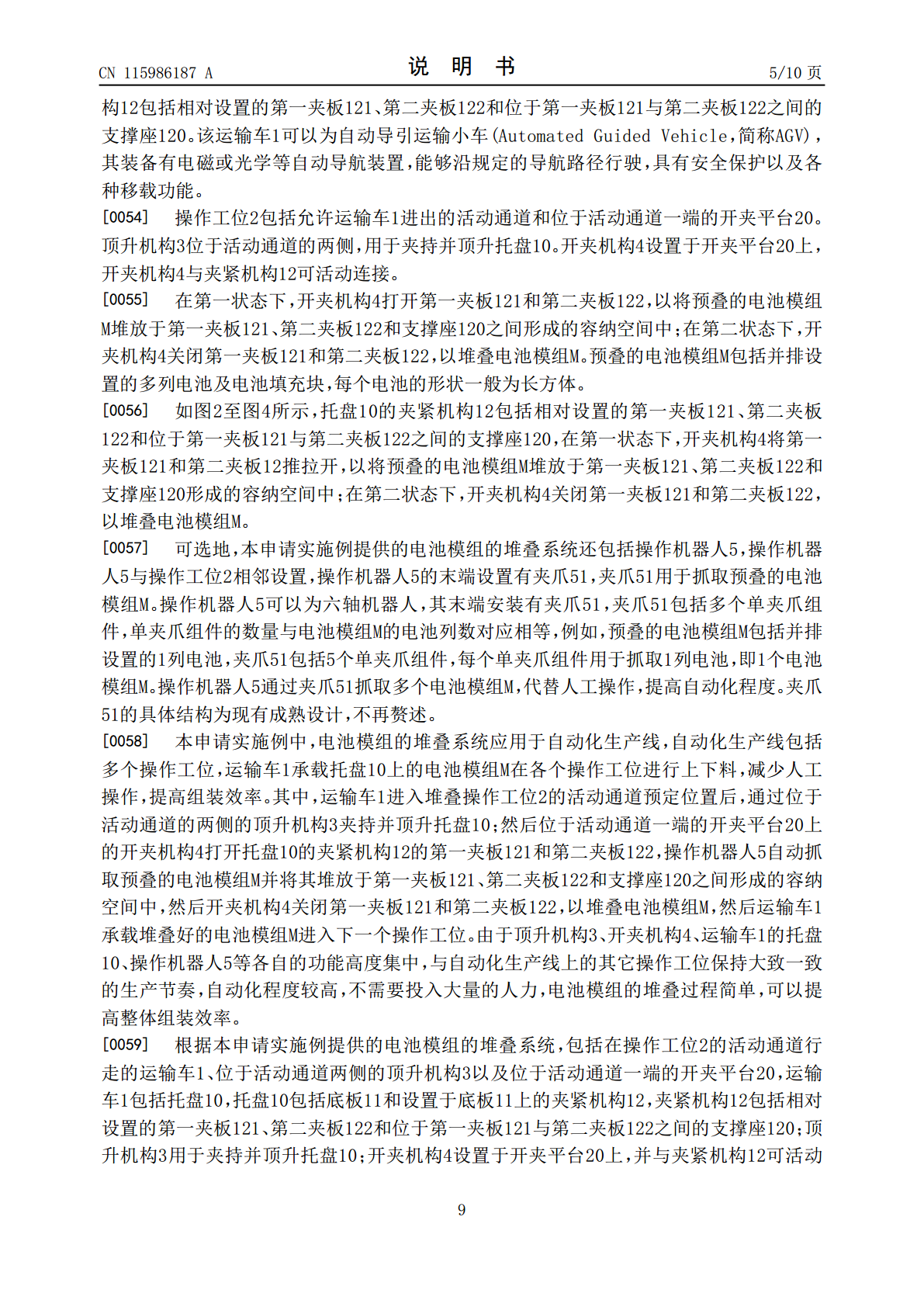
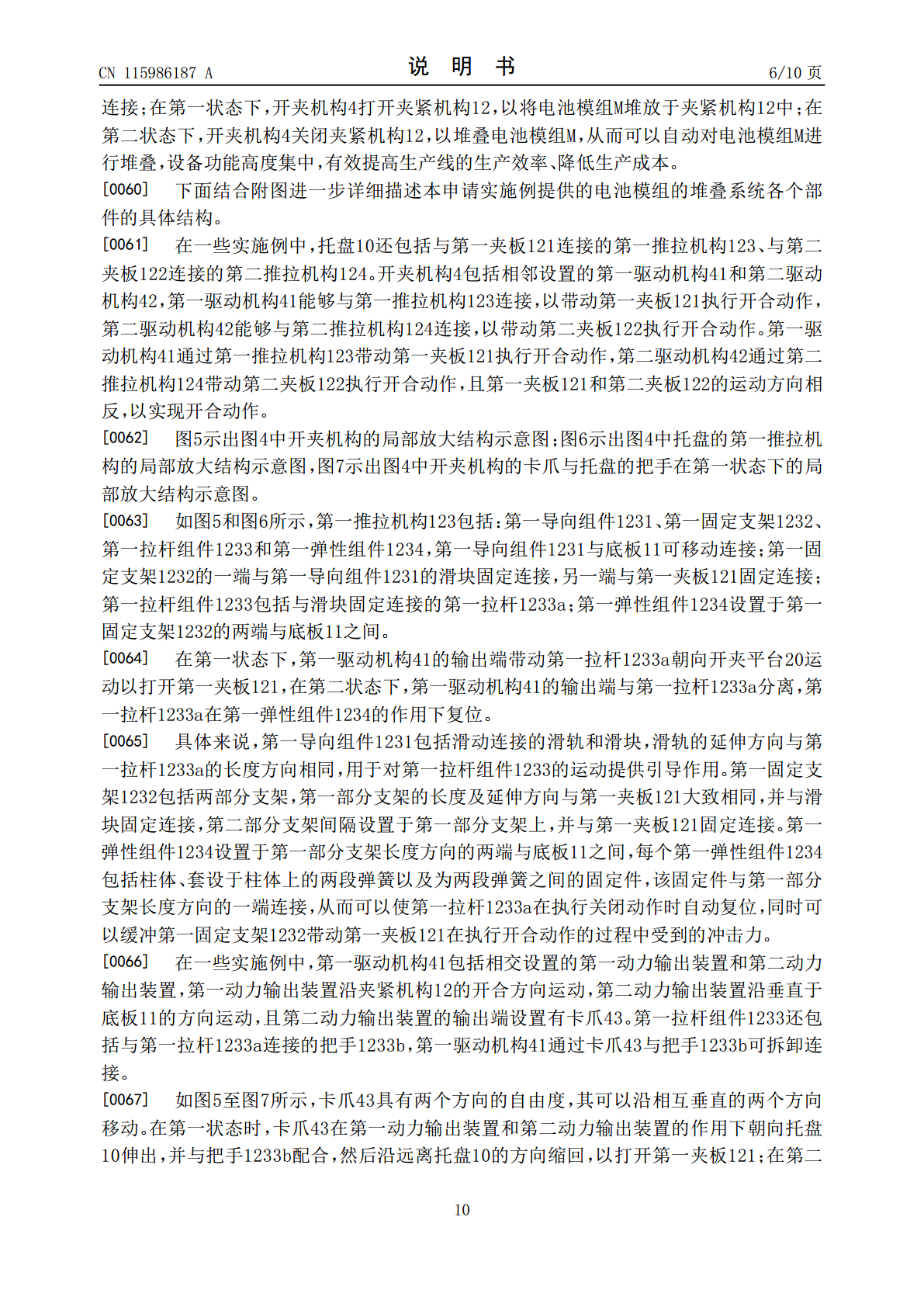
本申请涉及电池模组的堆叠系统及堆叠方法,堆叠系统包括:运输车,包括托盘,托盘包括底板和设置于底板上的夹紧机构,夹紧机构包括相对设置的第一夹板、第二夹板和位于第一夹板与第二夹板之间的支撑座;操作工位,包括允许运输车进出的活动通道和位于活动通道一端的开夹平台;顶升机构,位于活动通道的两侧,用于夹持并顶升托盘;以及开夹机构,设置于开夹平台上,开夹机构与夹紧机构可活动连接;在第一状态下,开夹机构打开第一夹板和第二夹板,以将预叠的电池模组堆放于第一夹板、第二夹板和支撑座之间形成的容纳空间中;在第二状态下,开夹机构关
电池模组的电芯堆叠方法及电芯堆叠系统.pdf
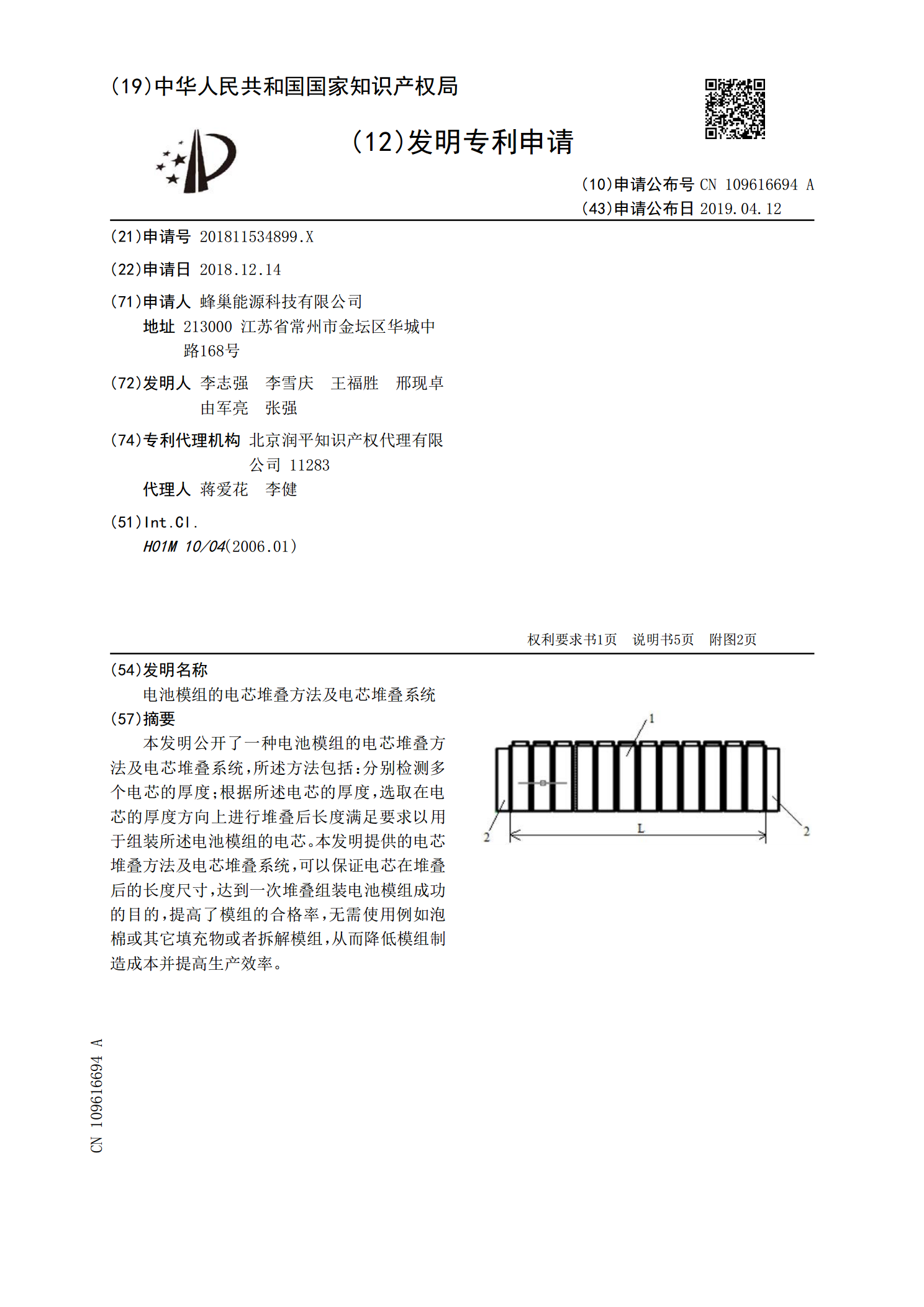
本发明公开了一种电池模组的电芯堆叠方法及电芯堆叠系统,所述方法包括:分别检测多个电芯的厚度;根据所述电芯的厚度,选取在电芯的厚度方向上进行堆叠后长度满足要求以用于组装所述电池模组的电芯。本发明提供的电芯堆叠方法及电芯堆叠系统,可以保证电芯在堆叠后的长度尺寸,达到一次堆叠组装电池模组成功的目的,提高了模组的合格率,无需使用例如泡棉或其它填充物或者拆解模组,从而降低模组制造成本并提高生产效率。

电池模组自动堆叠设备.pdf
本发明涉及一种电池模组自动堆叠设备;在机箱两侧分别设置六轴堆叠机器人和六轴上料机器人,在六轴堆叠机器人两侧设置端板来料组件和电芯来料组件,在机箱上设置堆叠机构、翻转机构和平移机构;首先,堆叠机构通过翻转机构倾斜一定角度,然后六轴堆叠机器人通过夹爪抓取端板来料和电芯来料组件上的端板和电芯至堆叠机构上,翻转机构带动堆叠机构复位,再然后平移机构带动堆叠机构平移至六轴下料机器人处,最后,六轴下料机器人抓取堆叠形成的电池模组移至下一步工序。本发明可以实现电池模组堆叠过程的全自动化,具有减少生产成本、提高生产效率和良

电池模组堆叠旋转装置.pdf
本发明公开了一种电池模组堆叠旋转装置,包括前、后对称设于分度机构的转盘上的两个堆叠工装;各堆叠工装包括安装于左、右支撑板之间的堆叠架,堆叠架的左、右倾斜靠板上设有与之垂直的底托,底托由左、右靠板下方设置的丝杆螺母传动副带动沿左、右靠板上、下移动,左、右靠板上分别设有左、右夹板,左、右夹板和底托以及左、右靠板之间形成端板、N个电芯和尾板依次进行堆叠形成电池模组的限位区域;转盘每次旋转180°使两堆叠工装分别于抓取端板尾板工位和电芯叠放工位之间转换。本发明提高了电池模组堆叠工作效率,保证电芯极柱面的平整度以及
电芯模组的堆叠方法、堆叠工装和电芯模组.pdf
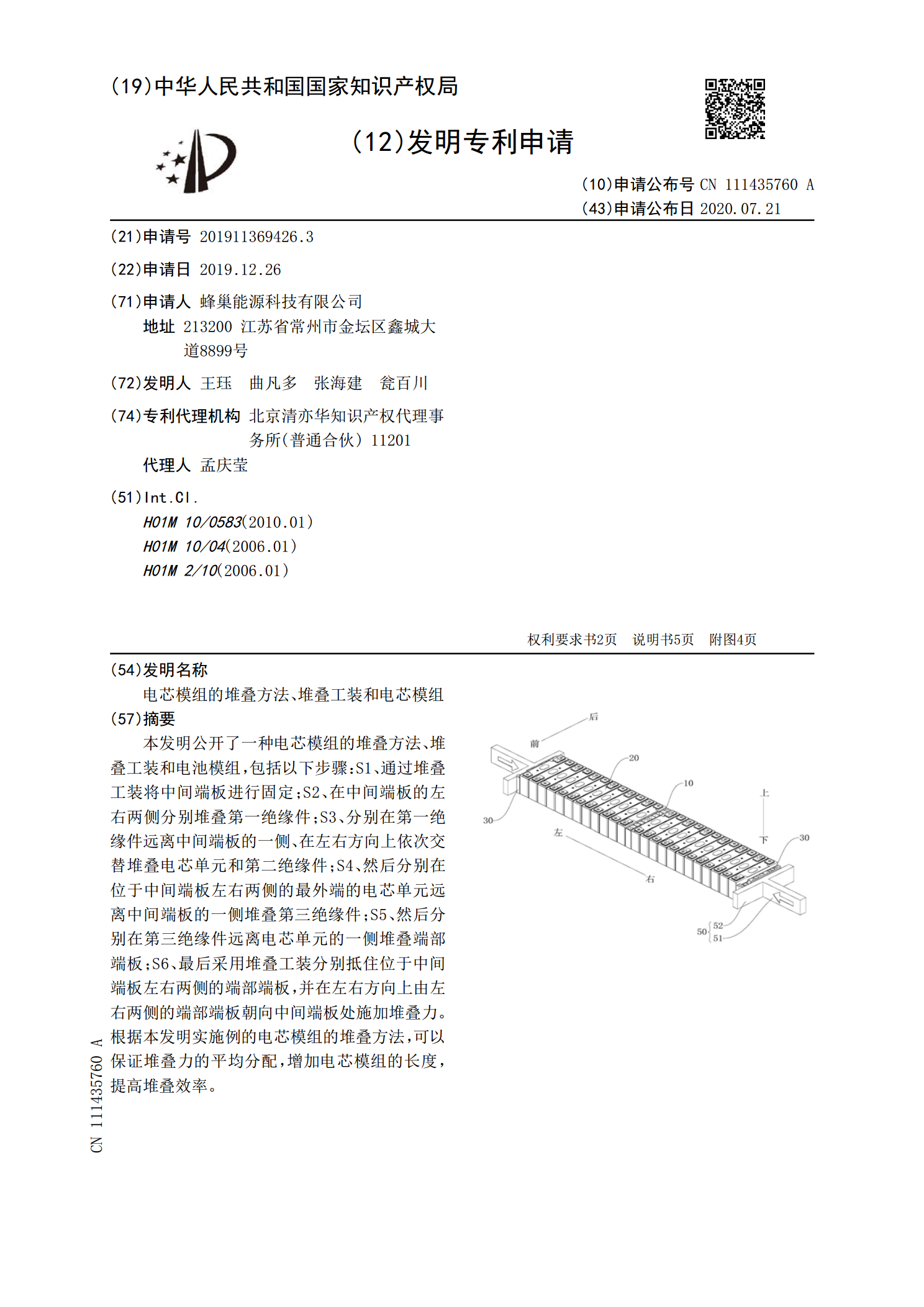
本发明公开了一种电芯模组的堆叠方法、堆叠工装和电池模组,包括以下步骤:S1、通过堆叠工装将中间端板进行固定;S2、在中间端板的左右两侧分别堆叠第一绝缘件;S3、分别在第一绝缘件远离中间端板的一侧、在左右方向上依次交替堆叠电芯单元和第二绝缘件;S4、然后分别在位于中间端板左右两侧的最外端的电芯单元远离中间端板的一侧堆叠第三绝缘件;S5、然后分别在第三绝缘件远离电芯单元的一侧堆叠端部端板;S6、最后采用堆叠工装分别抵住位于中间端板左右两侧的端部端板,并在左右方向上由左右两侧的端部端板朝向中间端板处施加堆叠力。