
一种果实采摘机器人机械臂.pdf

景福****90


1/7
2/7

3/7

4/7

5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种果实采摘机器人机械臂.pdf
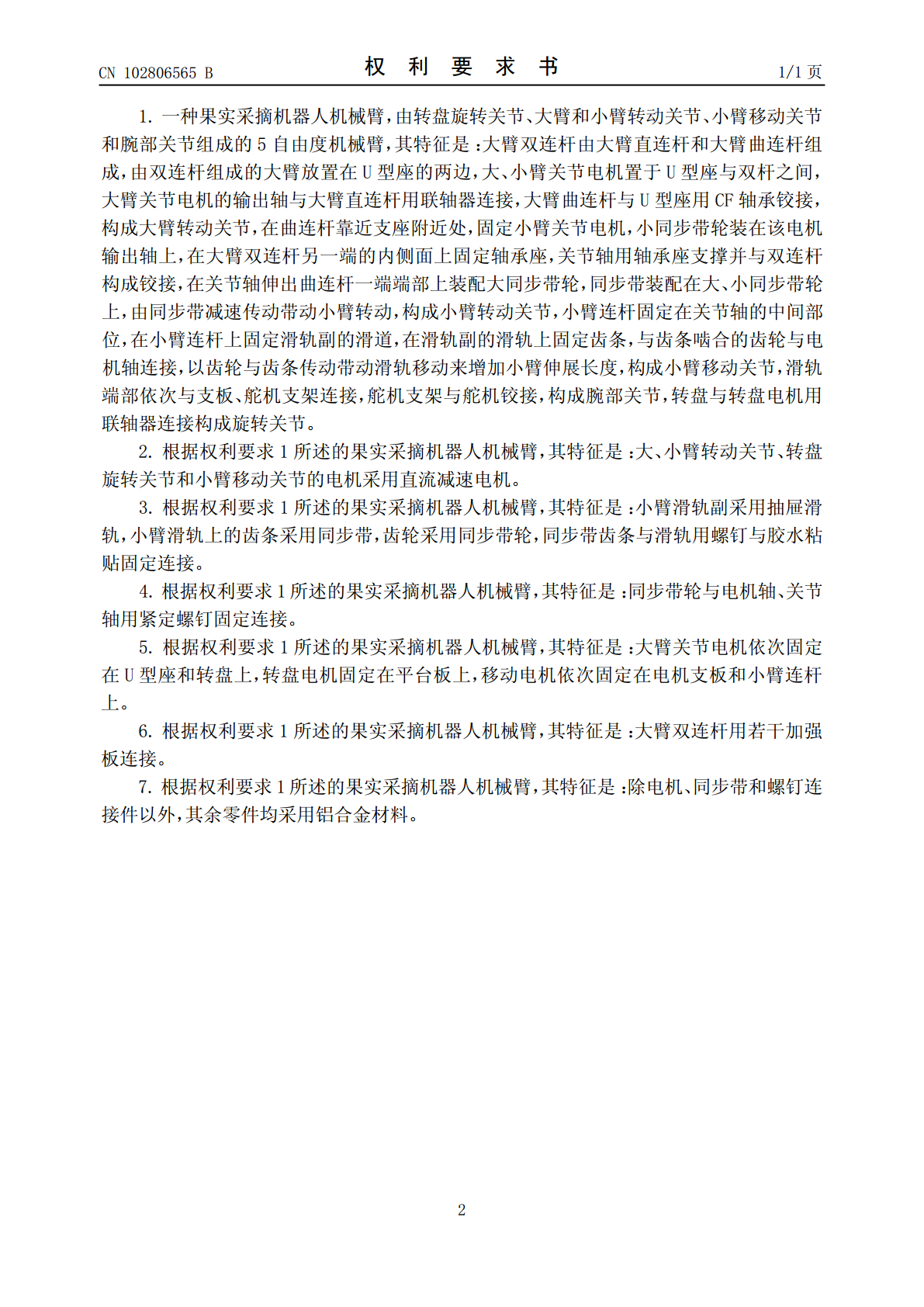
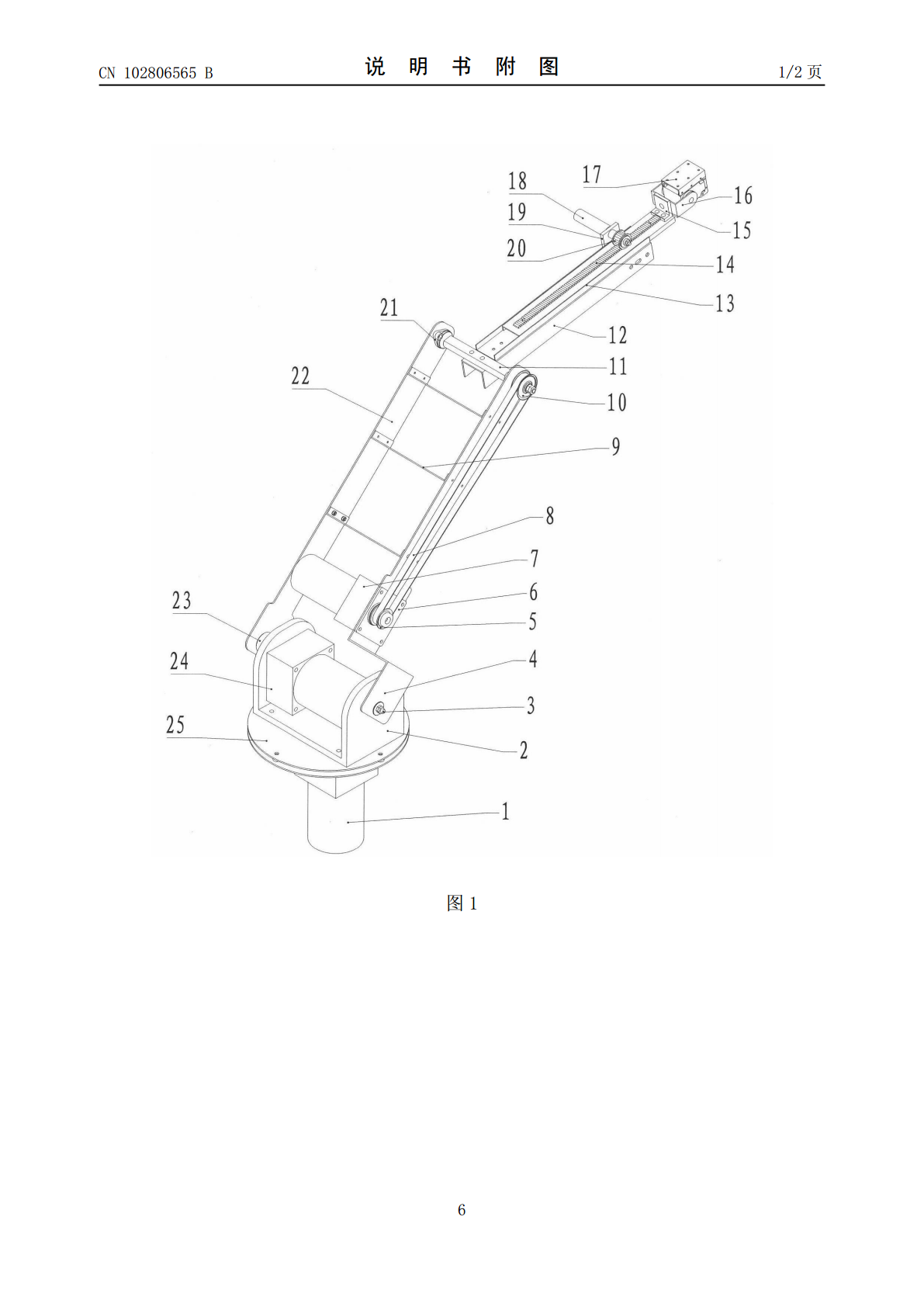
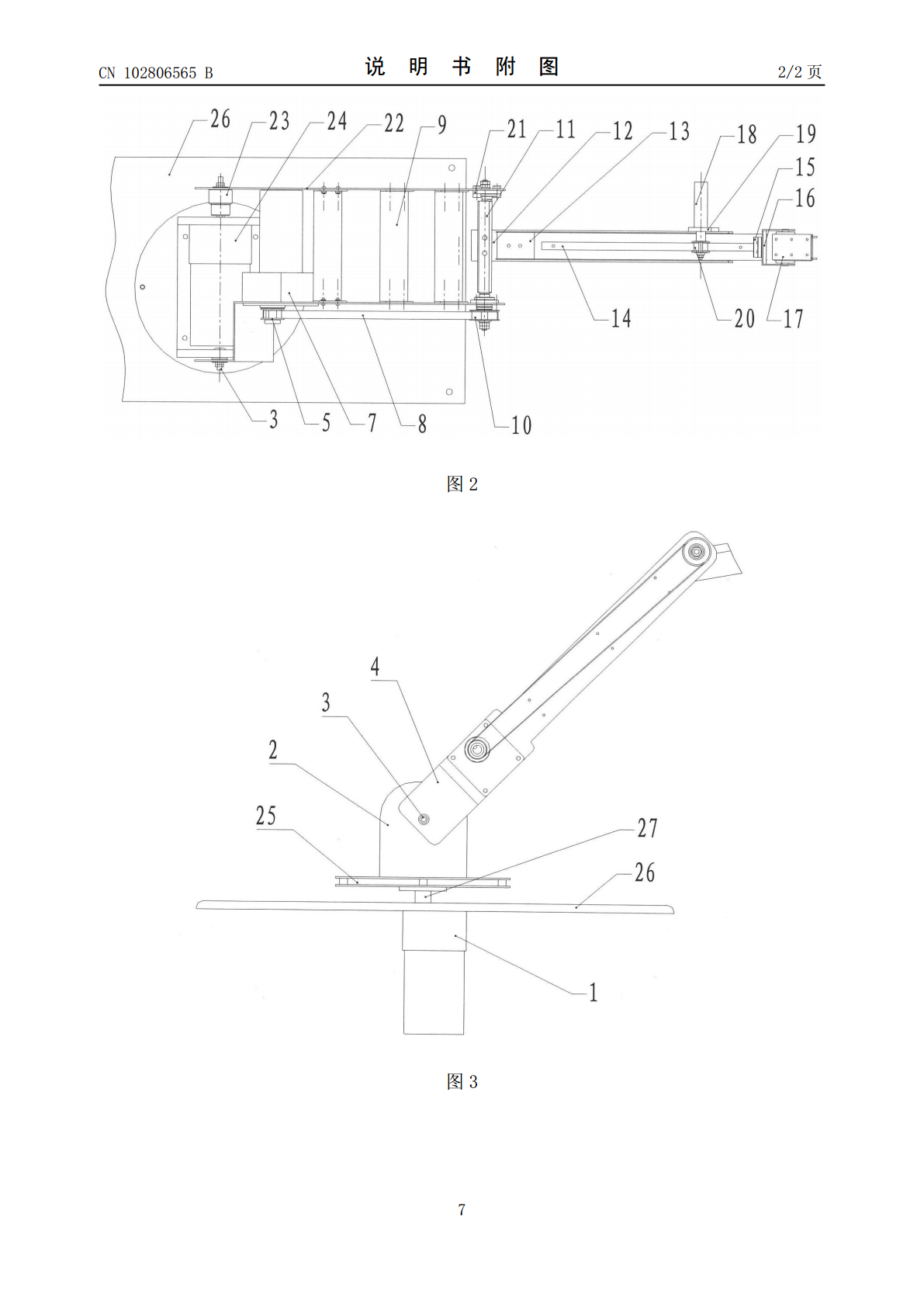
本发明公开一种果实采摘机器人机械臂。双连杆组成大臂,其关节电机置于U型座上,电机输出轴与大臂直连杆用联轴器连接,大臂曲连杆与U型座用CF轴承铰接,构成大臂转动关节,小臂关节电机固定在曲连杆上,小同步带轮装在该电机输出轴上,双连杆的另一端与关节轴铰接,在关节轴的一端装配大同步带轮,由同步带减速传动带动固定在关节轴上的小臂转动,构成小臂转动关节,在小臂连杆上固定滑轨、齿条和电机,齿轮与齿条传动构成小臂移动关节,滑轨端部铰接舵机构成腕部关节,转盘与电机连接构成旋转关节。本机械臂具有5个自由度,整体刚性强,与果实

一种基于机械臂的果实采摘方法、系统及装置.pdf
本发明公开了一种基于机械臂的果实采摘方法、系统及装置,涉及农业采摘机械技术领域,主要目的在于提升对待采摘目标的采摘准确率。本发明主要的技术方案为:根据第一视觉模块采集的图像确定至少一个待采摘目标的第一位置;根据所述第一位置以及机械臂的当前位置确定所述待采摘目标的采摘顺序列表;基于所述采摘顺序列表控制所述机械臂将第二视觉模块移动至待采摘目标对应的第一位置;根据所述第二视觉模块采集的图像确定所述待采摘目标的尺寸信息以及采摘位置;根据所述尺寸信息调整所述果实采摘模块的采摘口尺寸;根据所述采摘位置控制所述果实采摘

一种山地用果实自动采摘机器人.pdf
本发明涉及一种山地用果实自动采摘机器人,主要包括:山地拖拉机(1)、控制盒(2)、伺服电机(3)(5)(8)、位置传感器(4)(6)(9)、机械臂(7)、机械手(10)、摄像头(11)、红外距离传感器(12)、支撑架(13)、蓄电池(14)等。该山地拖拉机(1)以柴油机为动力机,通过柴油机带动发电机发电,给蓄电池(14)充电,再由蓄电池(14)给机械臂(7)供电。在机械手(10)中间有摄像头(11),可以捕获机械手(10)前方的果实图像,并传给控制盒(2),控制盒(2)将图像处理后,结合红外距离传感器(1

果蔬采摘机器人机械臂研究现状与展望.pptx
汇报人:/目录0102研究背景与意义国内外研究现状研究方法与技术路线03机械臂结构设计机械臂运动控制机械臂感知与定位机械臂作业效率与可靠性04苹果采摘机器人机械臂柑橘采摘机器人机械臂草莓采摘机器人机械臂蔬菜采摘机器人机械臂05当前面临的挑战技术发展趋势与展望未来研究方向与重点对策建议与措施汇报人:

一种用于多臂采摘机器人的猕猴桃果实群多目标识别方法.pdf
本发明公开了一种用于多臂采摘机器人的猕猴桃果实群多目标识别方法,属于采摘机器人领域。包括:从底向上拍摄果实群,通过一个经训练的卷积神经网络对拍摄到的图像进行计算,识别出图像中的猕猴桃,并获取每个猕猴桃在图像上的位置信息。根据各个猕猴桃位置之间的距离远近关系对这些位置信息进行聚类,将距离相近的果实归为一个果实群,采摘机器人上有几个机械臂就聚类几个果实群,同一个果实群由同一个机械臂进行采摘,使机械臂之间的作业互不干涉。