
内窥镜系统以及使用内窥镜系统进行导引和成像的方法.pdf

宛菡****魔王

1/10
2/10
3/10
4/10
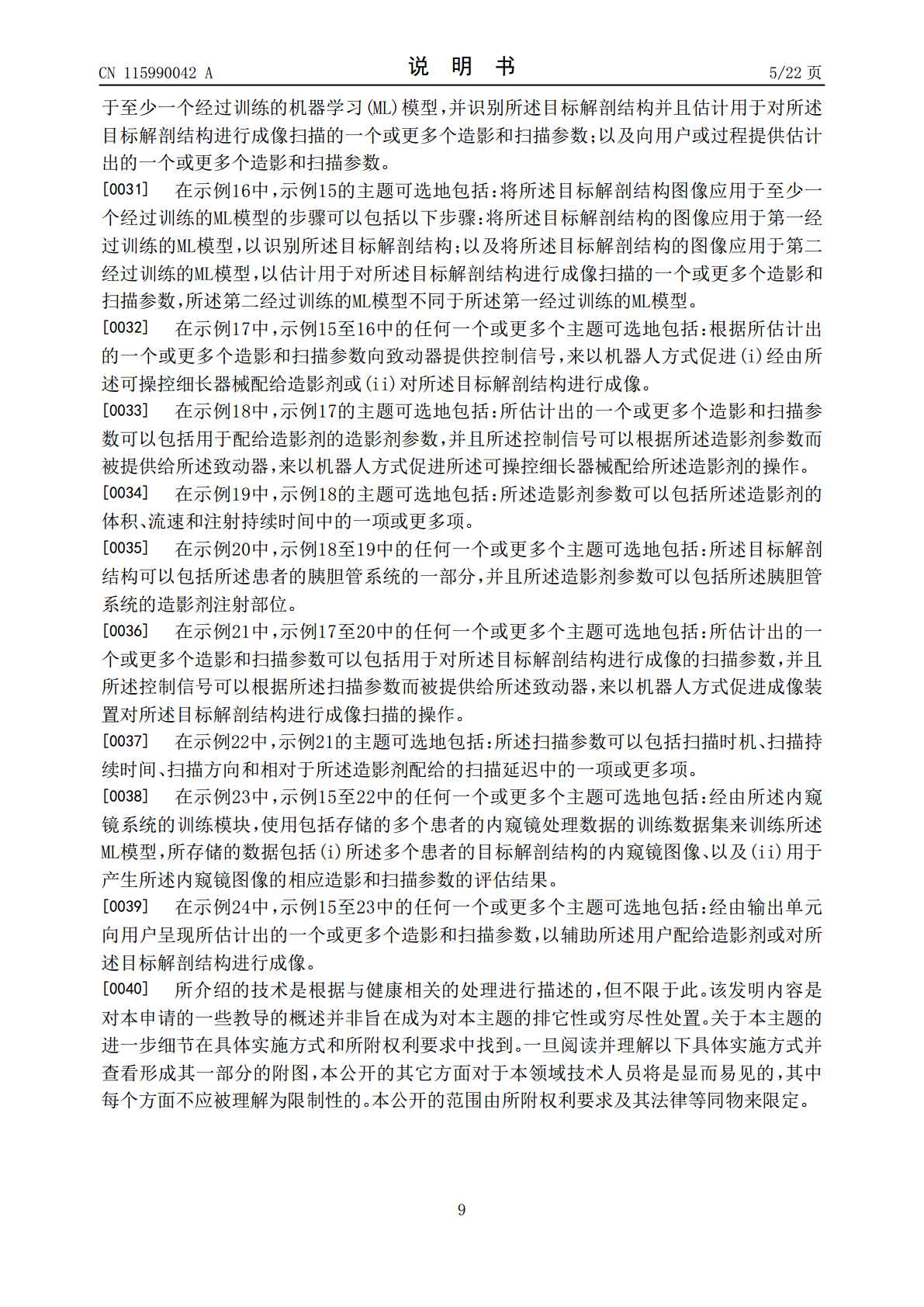
5/10
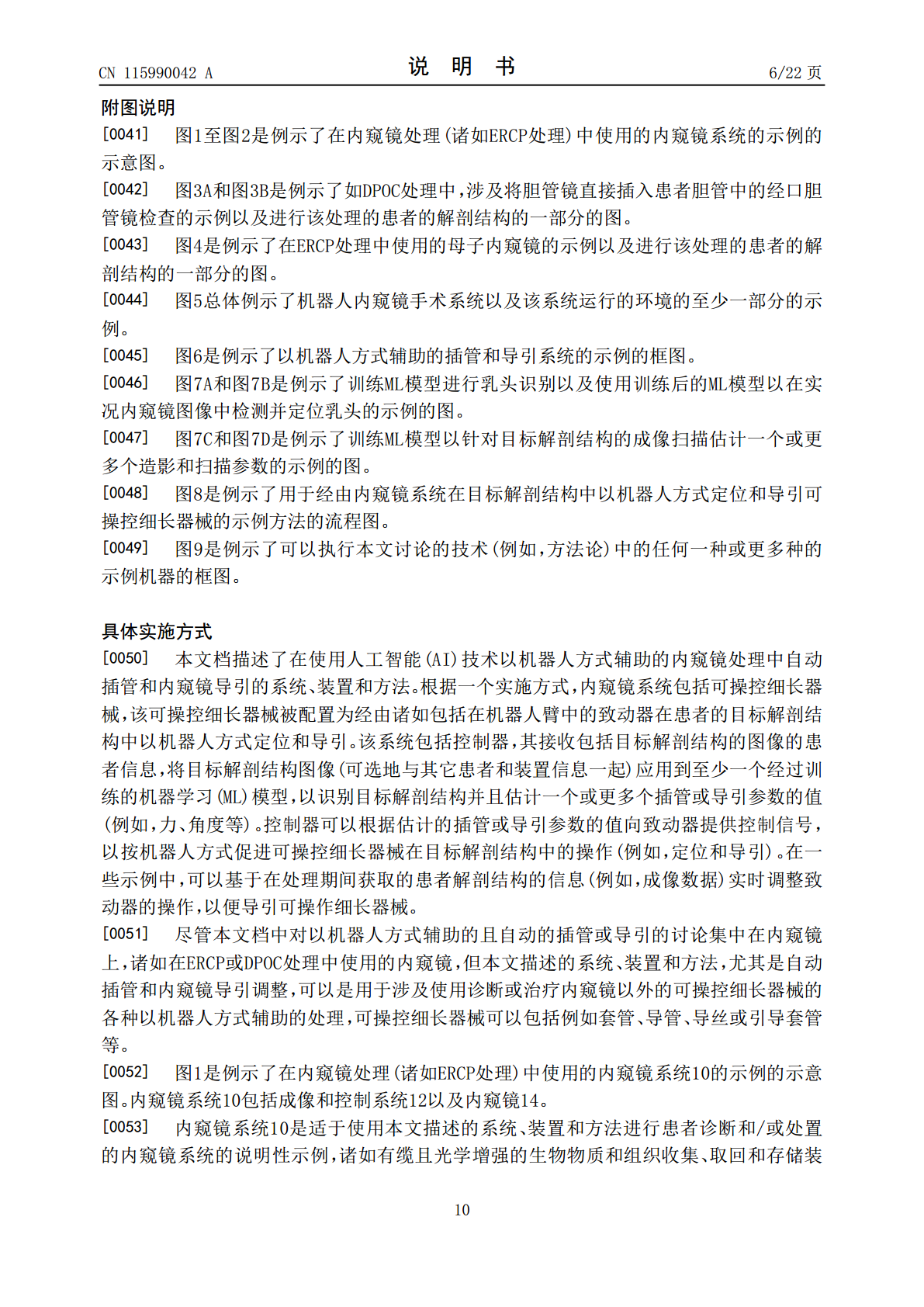
6/10
7/10
8/10
9/10
10/10
亲,该文档总共39页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
内窥镜系统以及使用内窥镜系统进行导引和成像的方法.pdf
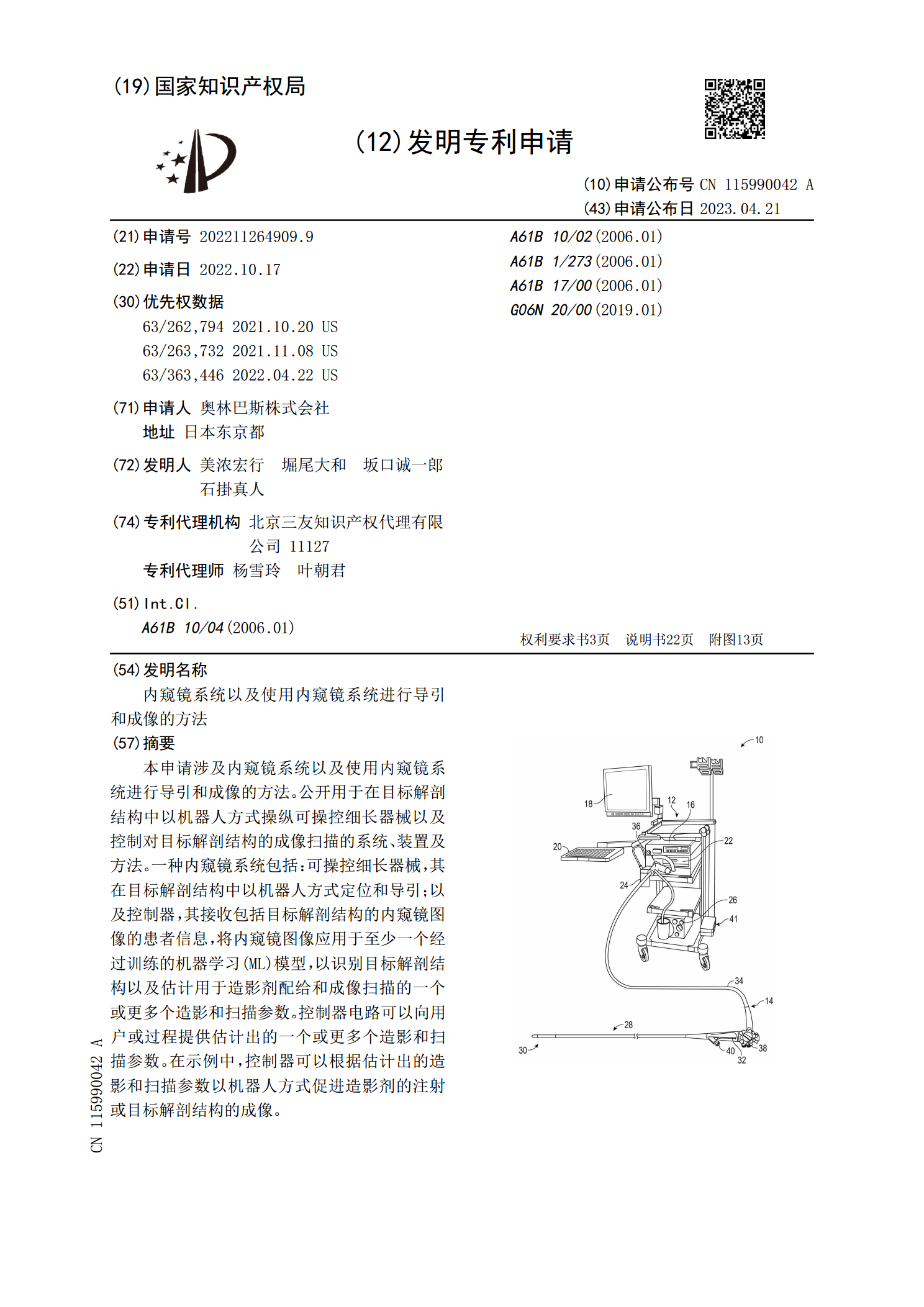
本申请涉及内窥镜系统以及使用内窥镜系统进行导引和成像的方法。公开用于在目标解剖结构中以机器人方式操纵可操控细长器械以及控制对目标解剖结构的成像扫描的系统、装置及方法。一种内窥镜系统包括:可操控细长器械,其在目标解剖结构中以机器人方式定位和导引;以及控制器,其接收包括目标解剖结构的内窥镜图像的患者信息,将内窥镜图像应用于至少一个经过训练的机器学习(ML)模型,以识别目标解剖结构以及估计用于造影剂配给和成像扫描的一个或更多个造影和扫描参数。控制器电路可以向用户或过程提供估计出的一个或更多个造影和扫描参数。在示

内窥镜成像方法和内窥镜系统.pdf
一种内窥镜成像方法和内窥镜系统,该方法包括:通过内窥镜系统的图像传感器采集待观察部位的图像信号;将所述图像信号发送至所述内窥镜系统的图像信号处理模块,通过所述图像信号处理模块对所述图像信号进行信号处理;当所述信号处理得到部分帧图像时,实时将所述部分帧图像发送至所述内窥镜系统的人工智能处理模块,通过所述人工智能处理模块对所述部分帧图像进行智能图像处理,以得到部分帧图像处理结果;根据至少两个部分帧图像处理结果显示内窥镜图像。本发明的内窥镜成像方法和内窥镜系统能够降低数据在图像信号处理模块和人工智能处理模块间交

用于内窥镜系统的成像及显示方法和内窥镜系统.pdf
一种用于内窥镜系统的成像及显示方法和内窥镜系统,该方法包括:获取待观察部位的内窥镜图像信号;基于所述内窥镜图像信号生成第一内窥镜图像和第二内窥镜图像,所述第一内窥镜图像与所述第二内窥镜图像之间具有视差;基于所述第一内窥镜图像和所述第二内窥镜图像生成立体内窥镜图像;从与所述内窥镜系统通信连接的外部图像源获取外部图像,所述外部图像为二维图像;在显示界面的至少两个显示区域中分别显示所述立体内窥镜图像和所述外部图像。本发明同时显示立体内窥镜图像和外部图像,立体内窥镜图像能够提供更真实的视觉感受,外部图像能够提供更
用于内窥镜系统的成像及显示方法和内窥镜系统.pdf
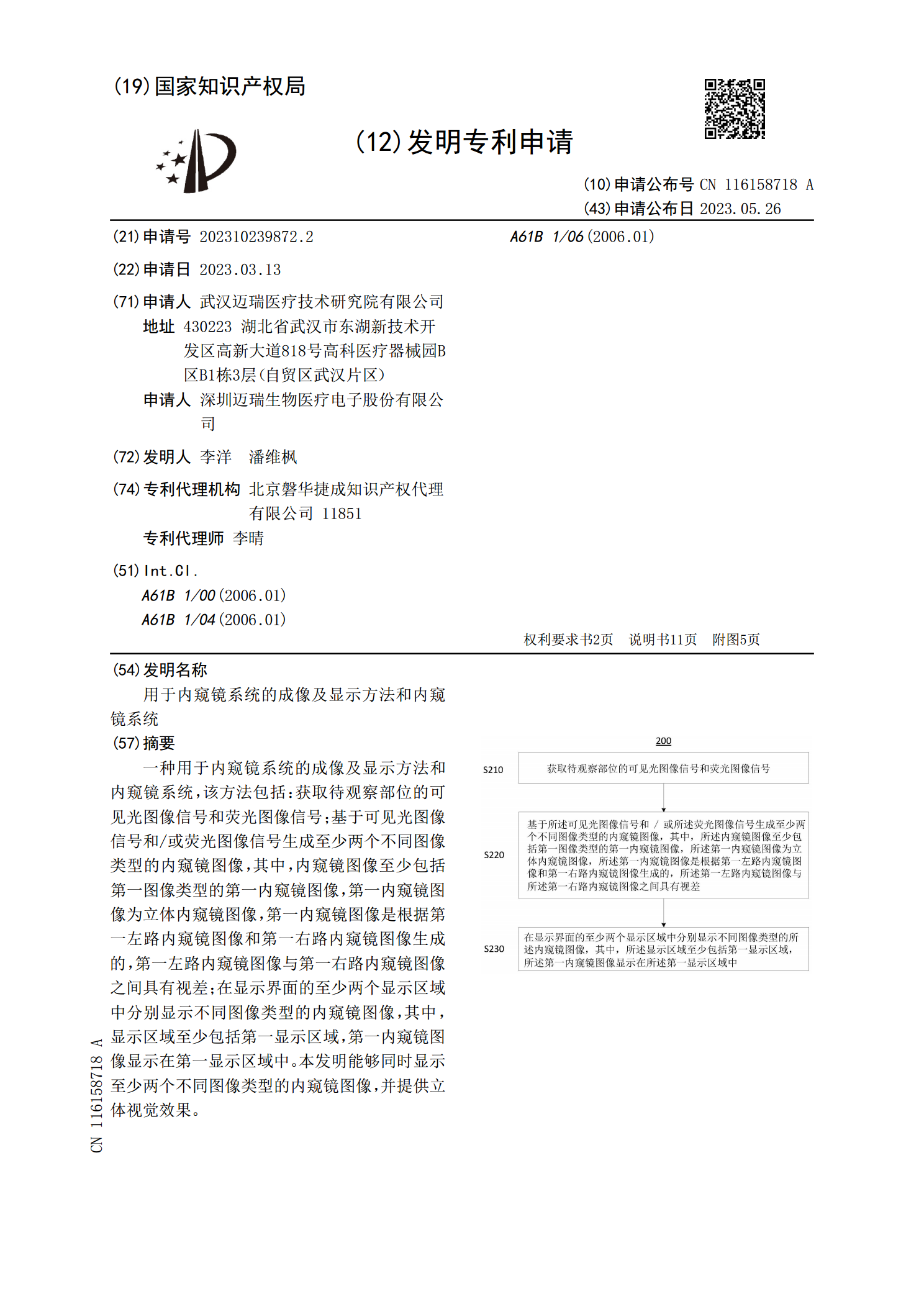
一种用于内窥镜系统的成像及显示方法和内窥镜系统,该方法包括:获取待观察部位的可见光图像信号和荧光图像信号;基于可见光图像信号和/或荧光图像信号生成至少两个不同图像类型的内窥镜图像,其中,内窥镜图像至少包括第一图像类型的第一内窥镜图像,第一内窥镜图像为立体内窥镜图像,第一内窥镜图像是根据第一左路内窥镜图像和第一右路内窥镜图像生成的,第一左路内窥镜图像与第一右路内窥镜图像之间具有视差;在显示界面的至少两个显示区域中分别显示不同图像类型的内窥镜图像,其中,显示区域至少包括第一显示区域,第一内窥镜图像显示在第一显

内窥镜及内窥镜成像系统.pdf
一种内窥镜及内窥镜成像系统,包括插入管、第一成像元件、第二成像元件、支架组件、第一信号传输组件和第二信号传输组件,第一成像元件固定在第一信号传输组件上,第二成像元件固定在第二信号传输组件上,第一信号传输组件和第二信号传输组件并排贴靠设置在支架组件上,插入管套设在支架组件的外侧;其中,内窥镜包括第一导热件、第二导热件和第三导热件,第一导热件设置在第一信号传输组件与第二信号传输组件之间,第二导热件设置在第一信号传输组件及第二信号传输组件与支架组件之间,第三导热件设置在插入管与支架组件之间,使得第一信号传输组件