
一种具有旋转机构的夹持机械臂.pdf

海昌****姐淑

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种具有旋转机构的夹持机械臂.pdf
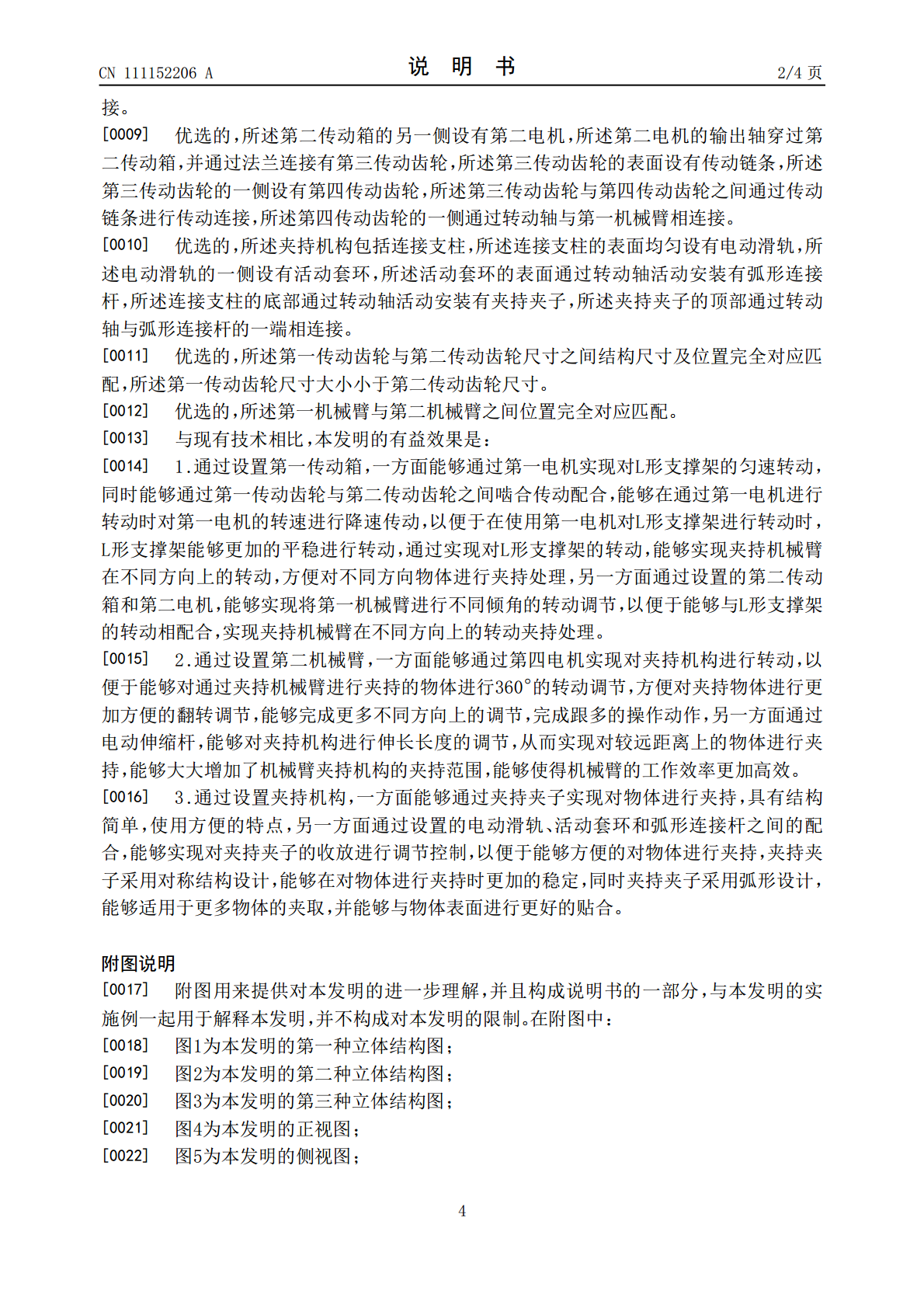
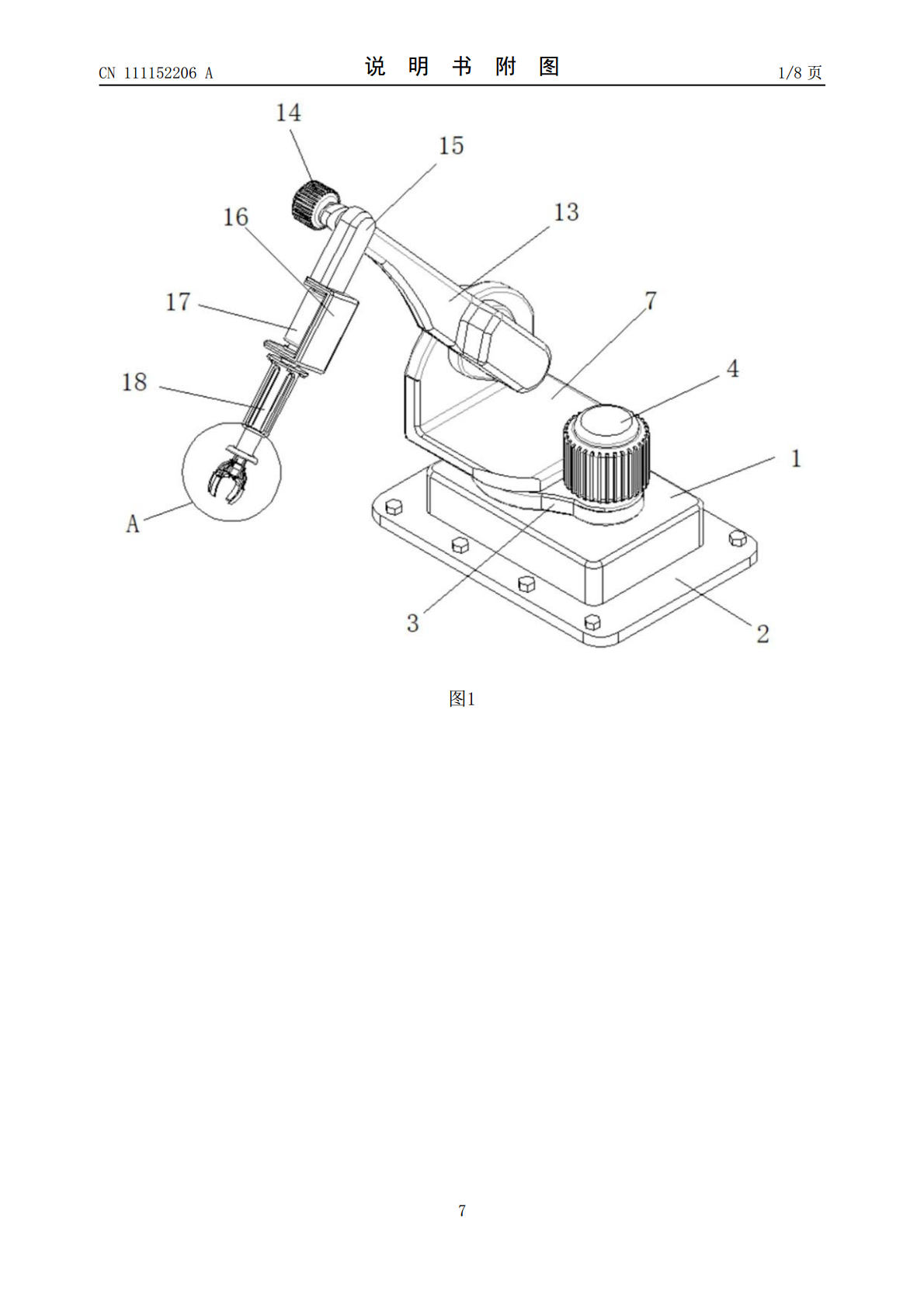
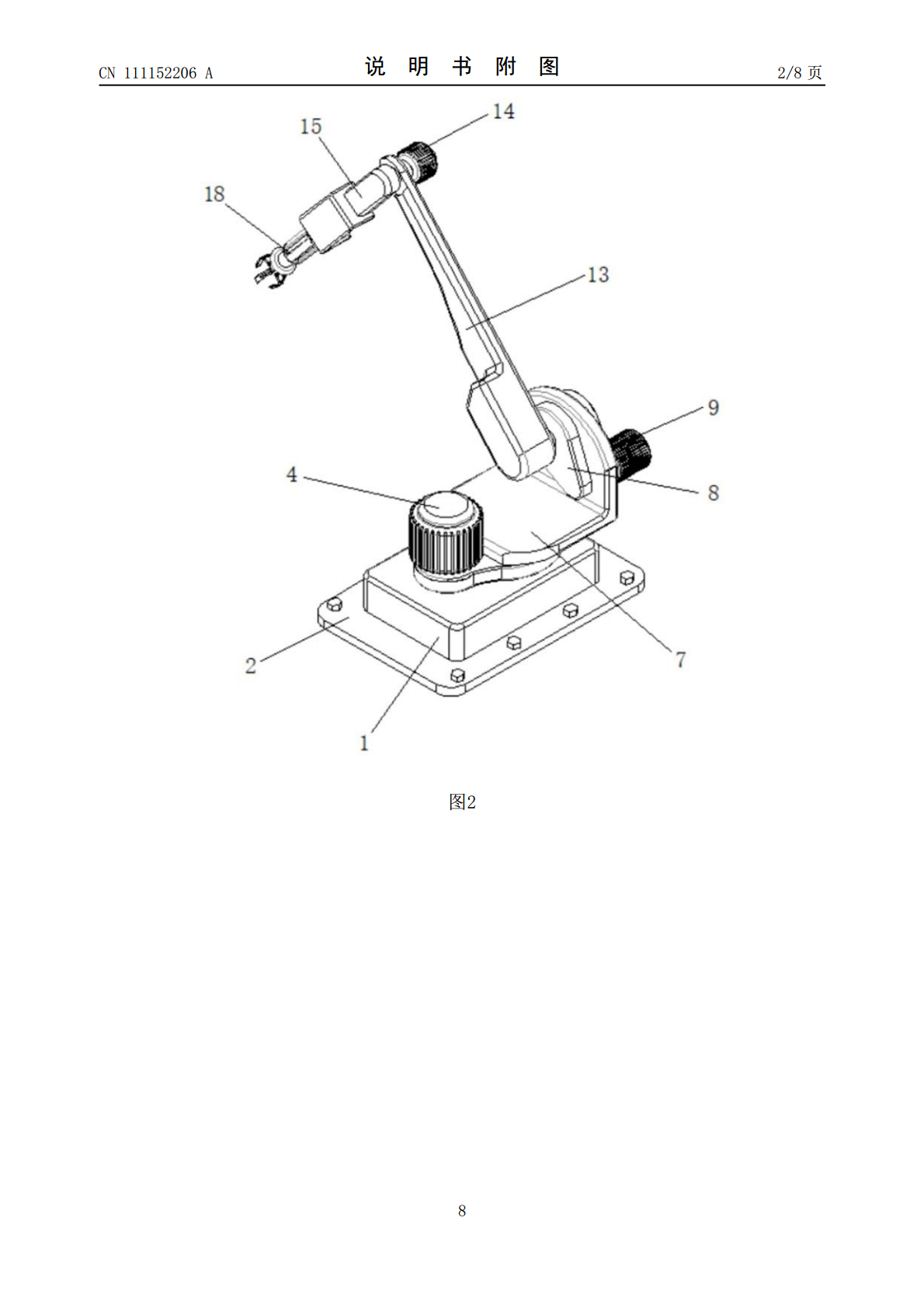
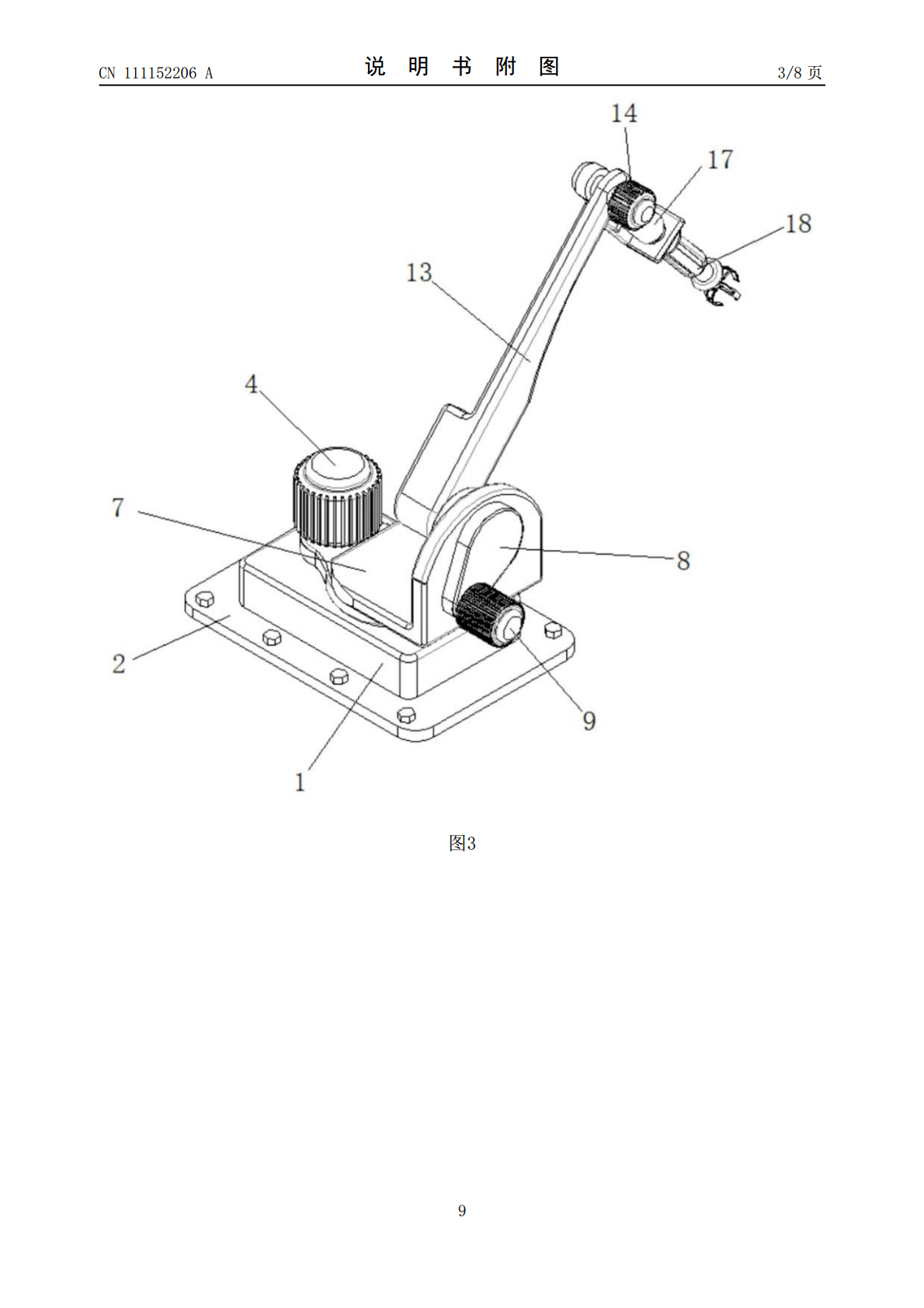
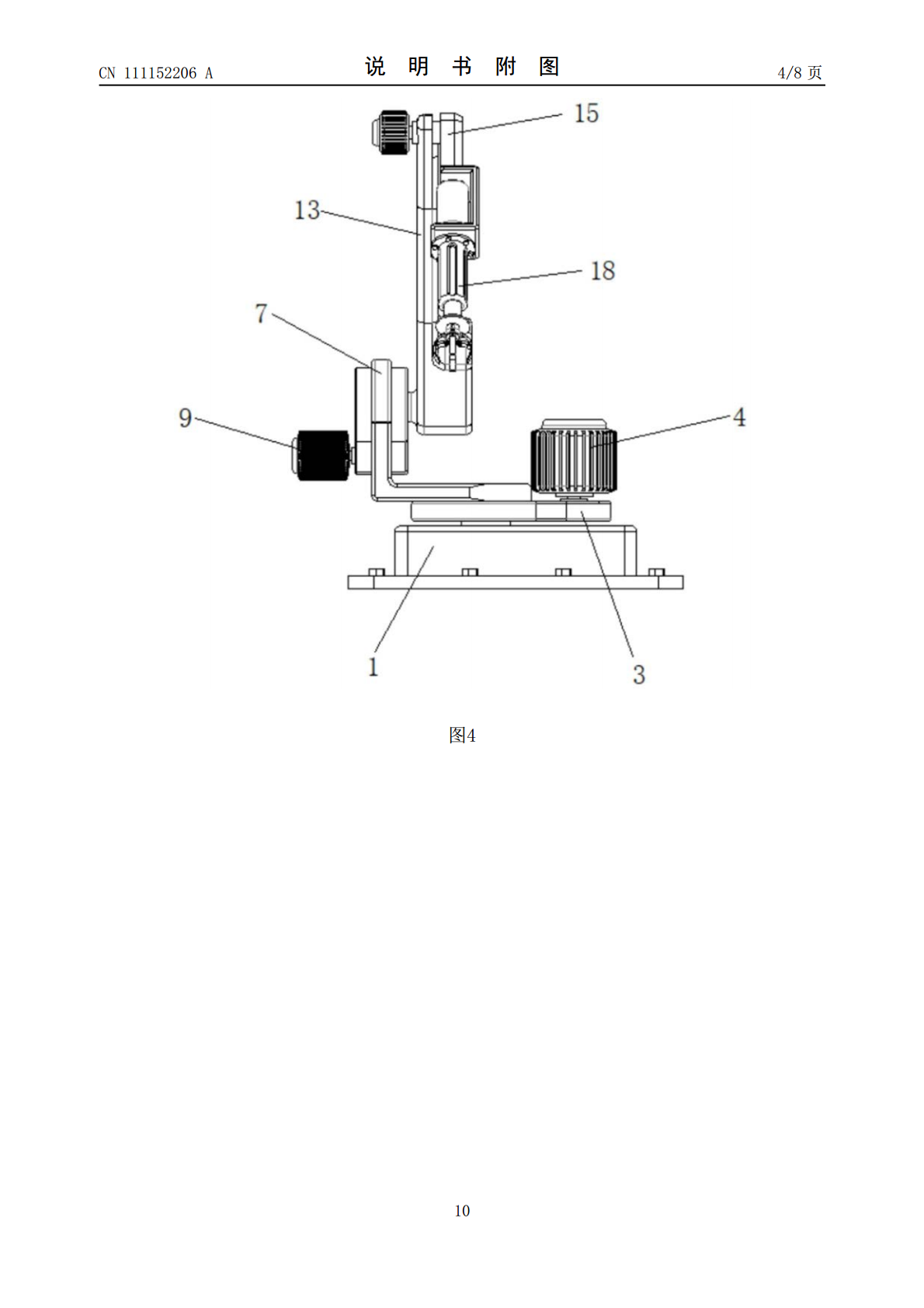
本发明属于夹持机械臂技术领域,尤其为一种具有旋转机构的夹持机械臂,包括支撑基座,所述支撑基座的顶部设有第一传动箱,所述第一传动箱的上方设有L形支撑架,所述L形支撑架的一侧镶嵌有第二传动箱,所述第二传动箱的一侧设有第一机械臂。通过设置第一传动箱,一方面能够通过第一电机实现对L形支撑架的匀速转动,同时能够通过第一传动齿轮与第二传动齿轮之间啮合传动配合,能够在通过第一电机进行转动时对第一电机的转速进行降速传动,以便于在使用第一电机对L形支撑架进行转动时,L形支撑架能够更加的平稳进行转动,通过实现对L形支撑架的转
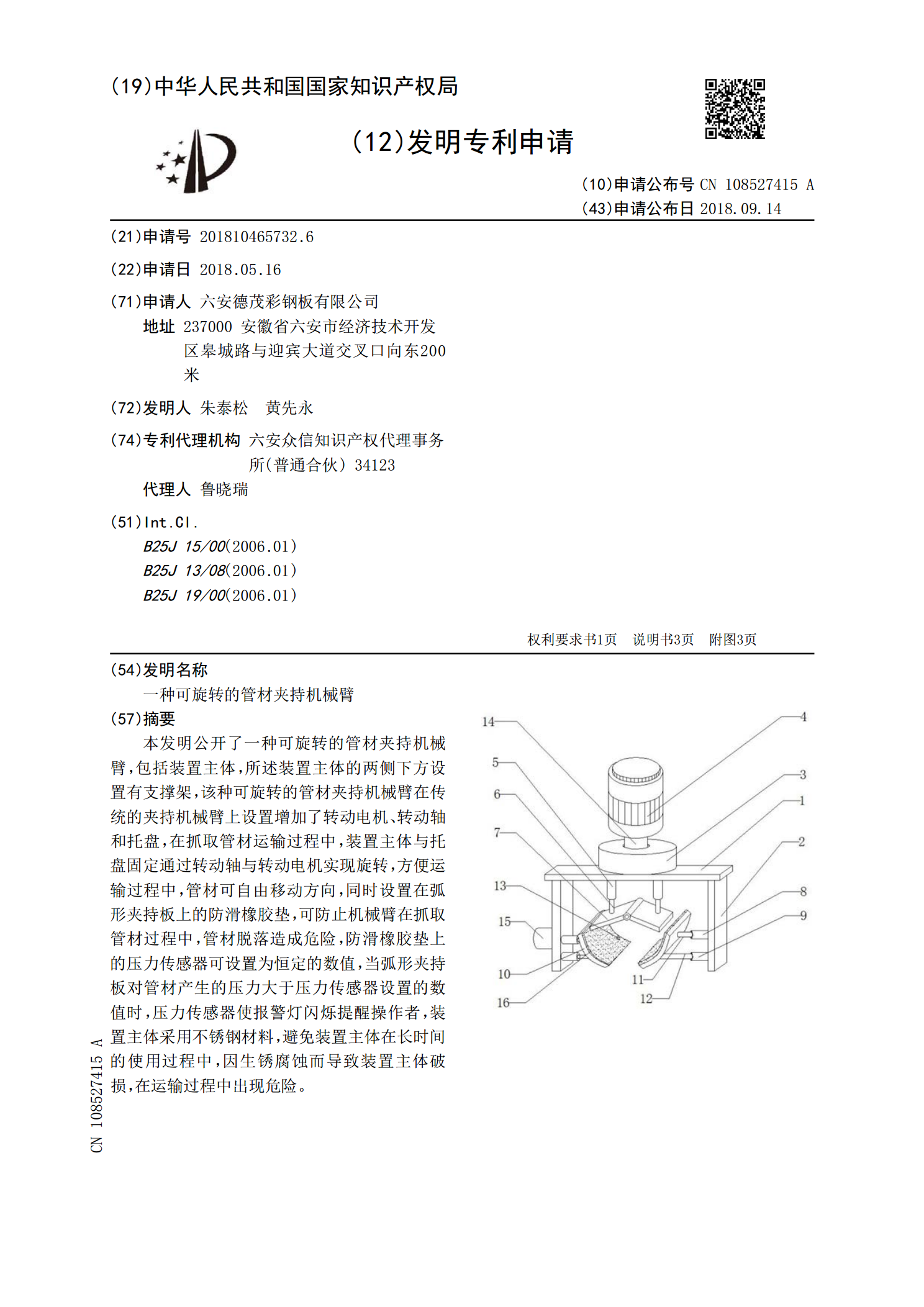
一种可旋转的管材夹持机械臂.pdf
本发明公开了一种可旋转的管材夹持机械臂,包括装置主体,所述装置主体的两侧下方设置有支撑架,该种可旋转的管材夹持机械臂在传统的夹持机械臂上设置增加了转动电机、转动轴和托盘,在抓取管材运输过程中,装置主体与托盘固定通过转动轴与转动电机实现旋转,方便运输过程中,管材可自由移动方向,同时设置在弧形夹持板上的防滑橡胶垫,可防止机械臂在抓取管材过程中,管材脱落造成危险,防滑橡胶垫上的压力传感器可设置为恒定的数值,当弧形夹持板对管材产生的压力大于压力传感器设置的数值时,压力传感器使报警灯闪烁提醒操作者,装置主体采用不锈
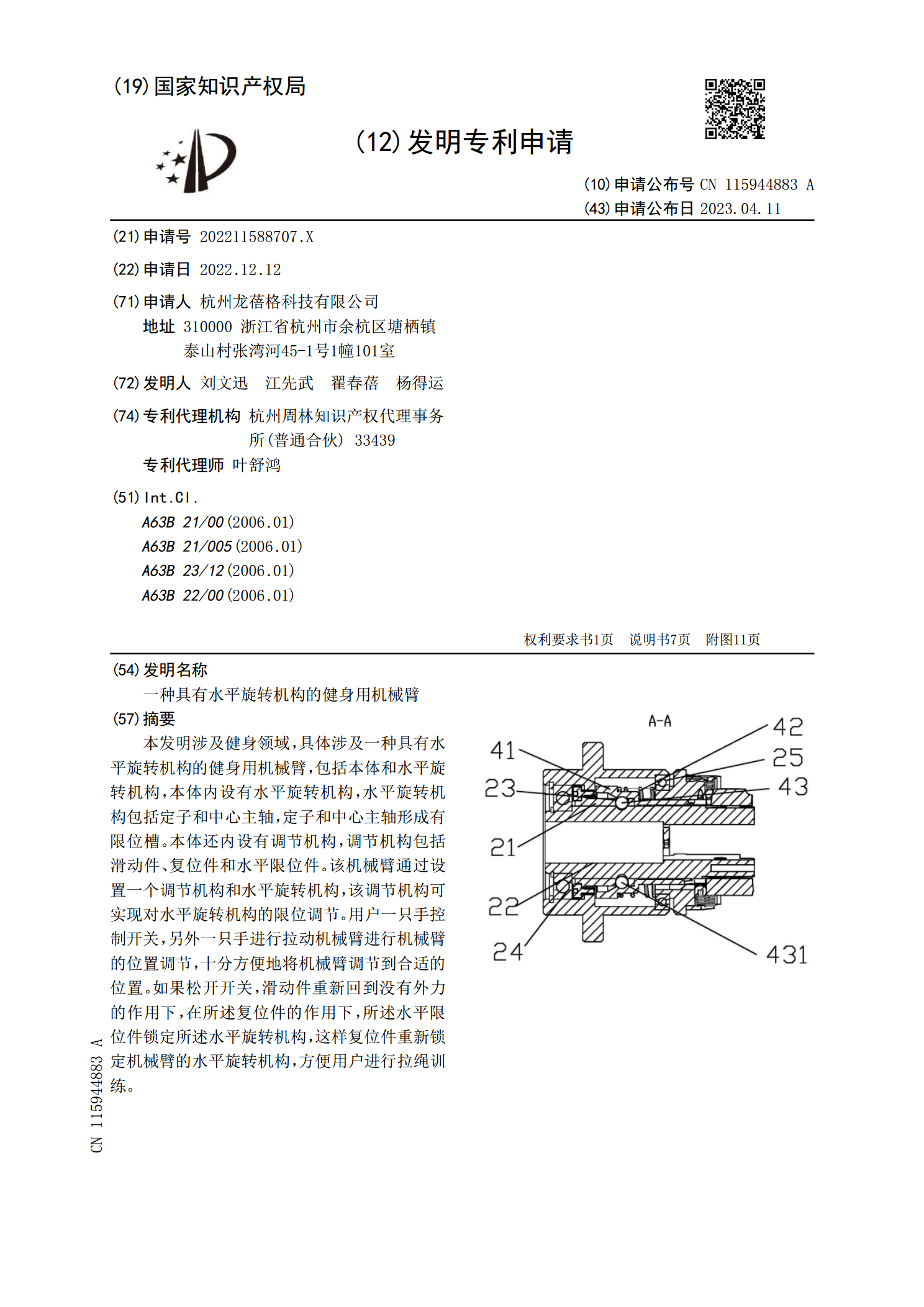
一种具有水平旋转机构的健身用机械臂.pdf
本发明涉及健身领域,具体涉及一种具有水平旋转机构的健身用机械臂,包括本体和水平旋转机构,本体内设有水平旋转机构,水平旋转机构包括定子和中心主轴,定子和中心主轴形成有限位槽。本体还内设有调节机构,调节机构包括滑动件、复位件和水平限位件。该机械臂通过设置一个调节机构和水平旋转机构,该调节机构可实现对水平旋转机构的限位调节。用户一只手控制开关,另外一只手进行拉动机械臂进行机械臂的位置调节,十分方便地将机械臂调节到合适的位置。如果松开开关,滑动件重新回到没有外力的作用下,在所述复位件的作用下,所述水平限位件锁定所
一种具有旋转功能的机械臂.pdf
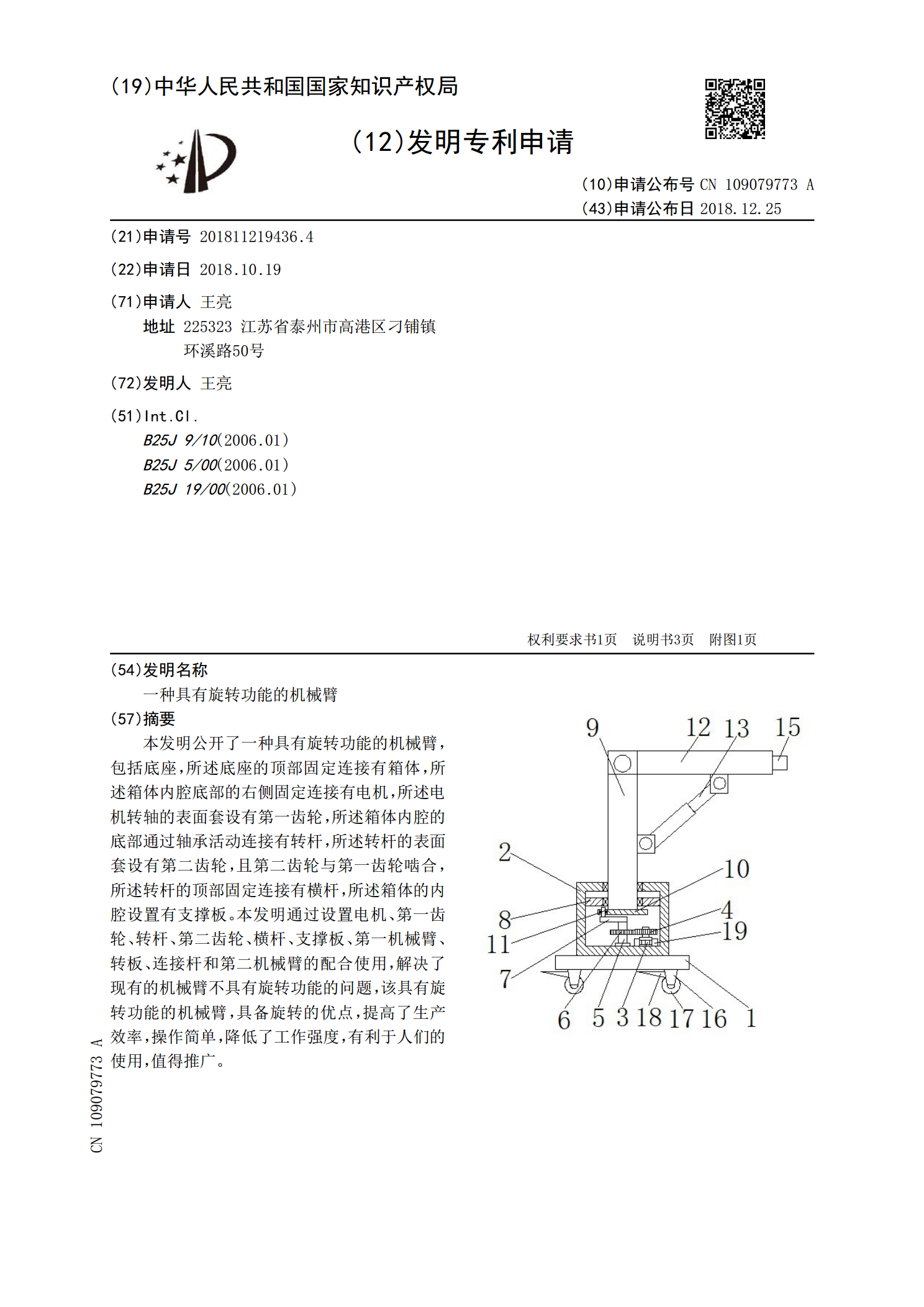
本发明公开了一种具有旋转功能的机械臂,包括底座,所述底座的顶部固定连接有箱体,所述箱体内腔底部的右侧固定连接有电机,所述电机转轴的表面套设有第一齿轮,所述箱体内腔的底部通过轴承活动连接有转杆,所述转杆的表面套设有第二齿轮,且第二齿轮与第一齿轮啮合,所述转杆的顶部固定连接有横杆,所述箱体的内腔设置有支撑板。本发明通过设置电机、第一齿轮、转杆、第二齿轮、横杆、支撑板、第一机械臂、转板、连接杆和第二机械臂的配合使用,解决了现有的机械臂不具有旋转功能的问题,该具有旋转功能的机械臂,具备旋转的优点,提高了生产效率,

一种具有减震机构的机械臂.pdf
本发明公开了一种具有减震机构的机械臂,包括固定底座、第一紧箍螺栓和H形块,所述固定底座的四周贯穿有四组支撑杆,所述支撑杆的底端固定连接有支撑板,所述支撑杆的上侧外壁螺纹连接有控制螺帽,所述固定底座的下侧固定安装有车轮,所述固定底座与车轮之间设置有两组第一L形块,一组所述第一L形块与固定底座下侧固定连接,另一组所述第一L形块与车轮的顶端固定连接,所述第一L形块的下侧和下侧均设置有一组第一缓冲底座,所述第一缓冲底座之间通过两组第一伸缩杆相连接。本发明通过滑动式连接结构和伸缩结构,有效的缓冲了机械臂在工作时对机