
一种具有减震机构的机械臂.pdf

静芙****可爱

1/9

2/9
3/9

4/9

5/9

6/9
7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种具有减震机构的机械臂.pdf
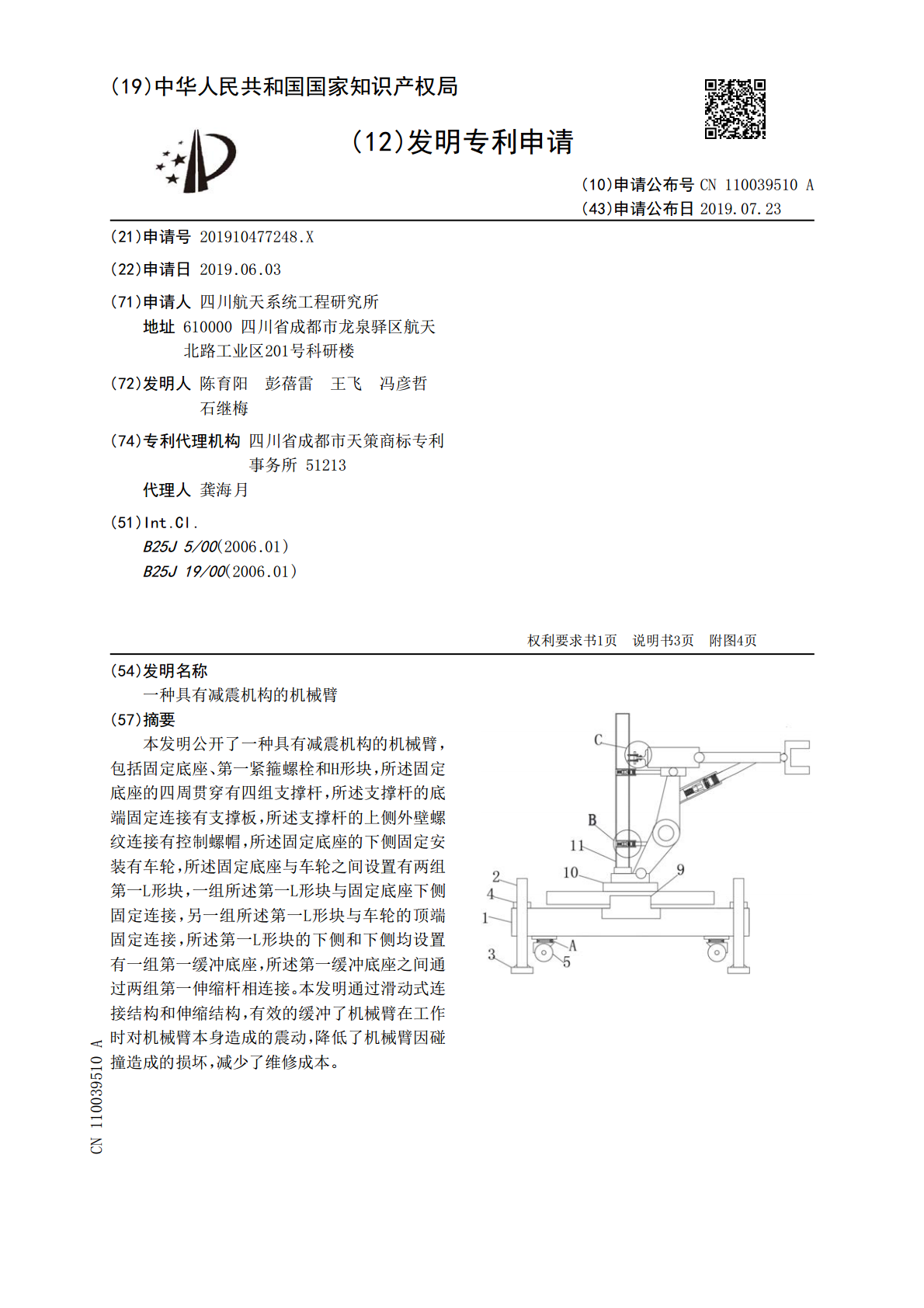
本发明公开了一种具有减震机构的机械臂,包括固定底座、第一紧箍螺栓和H形块,所述固定底座的四周贯穿有四组支撑杆,所述支撑杆的底端固定连接有支撑板,所述支撑杆的上侧外壁螺纹连接有控制螺帽,所述固定底座的下侧固定安装有车轮,所述固定底座与车轮之间设置有两组第一L形块,一组所述第一L形块与固定底座下侧固定连接,另一组所述第一L形块与车轮的顶端固定连接,所述第一L形块的下侧和下侧均设置有一组第一缓冲底座,所述第一缓冲底座之间通过两组第一伸缩杆相连接。本发明通过滑动式连接结构和伸缩结构,有效的缓冲了机械臂在工作时对机
一种具有传动机构的机械臂.pdf
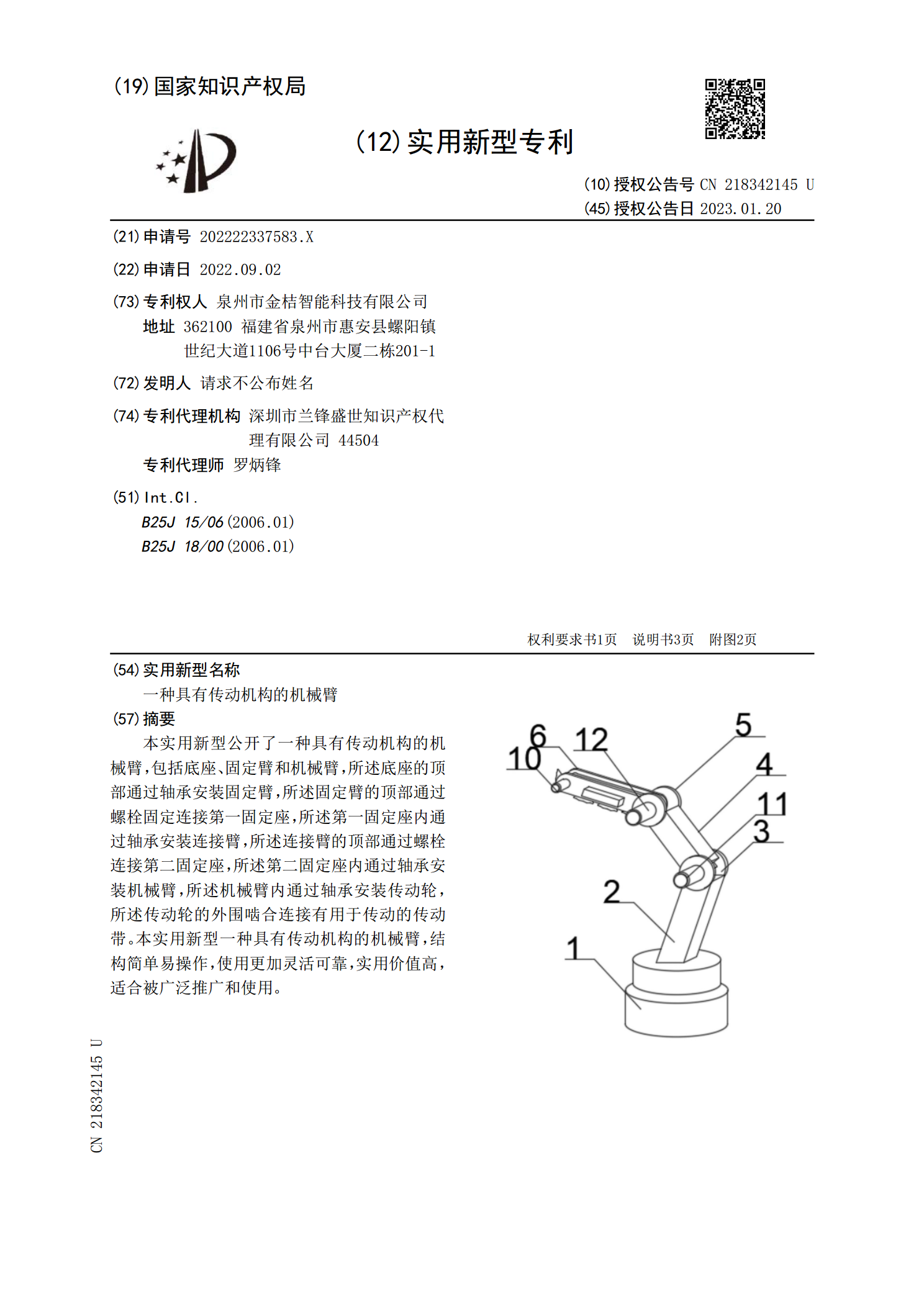
本实用新型公开了一种具有传动机构的机械臂,包括底座、固定臂和机械臂,所述底座的顶部通过轴承安装固定臂,所述固定臂的顶部通过螺栓固定连接第一固定座,所述第一固定座内通过轴承安装连接臂,所述连接臂的顶部通过螺栓连接第二固定座,所述第二固定座内通过轴承安装机械臂,所述机械臂内通过轴承安装传动轮,所述传动轮的外围啮合连接有用于传动的传动带。本实用新型一种具有传动机构的机械臂,结构简单易操作,使用更加灵活可靠,实用价值高,适合被广泛推广和使用。

一种具有防撞机构的机械臂.pdf
本发明公开了一种具有防撞机构的机械臂,包括移动横梁,所述移动横梁上设置有轨道,所述轨道上活动安装有移动底座,所述移动底座的两端均设置有第一防撞柱,所述第一防撞柱为中空结构,且中空结构的底部设置有第一缓冲弹簧,所述第一缓冲弹簧的另一端固定连接第二防撞柱,所述第二防撞柱的一端套设于第一防撞柱的中空结构内。本发明中在机械臂移动底座的两侧以及轨道两端均设置有了缓冲装置,使得机械臂在轨道上移动时,不会与轨道的两端碰撞,杜绝了碰撞时产生的震荡造成机械臂上零部件松动以及电子元件损坏的情况;防撞弹性柱保护了机械臂整体在转

一种具有旋转机构的夹持机械臂.pdf
本发明属于夹持机械臂技术领域,尤其为一种具有旋转机构的夹持机械臂,包括支撑基座,所述支撑基座的顶部设有第一传动箱,所述第一传动箱的上方设有L形支撑架,所述L形支撑架的一侧镶嵌有第二传动箱,所述第二传动箱的一侧设有第一机械臂。通过设置第一传动箱,一方面能够通过第一电机实现对L形支撑架的匀速转动,同时能够通过第一传动齿轮与第二传动齿轮之间啮合传动配合,能够在通过第一电机进行转动时对第一电机的转速进行降速传动,以便于在使用第一电机对L形支撑架进行转动时,L形支撑架能够更加的平稳进行转动,通过实现对L形支撑架的转
一种具有减震机构的风机.pdf
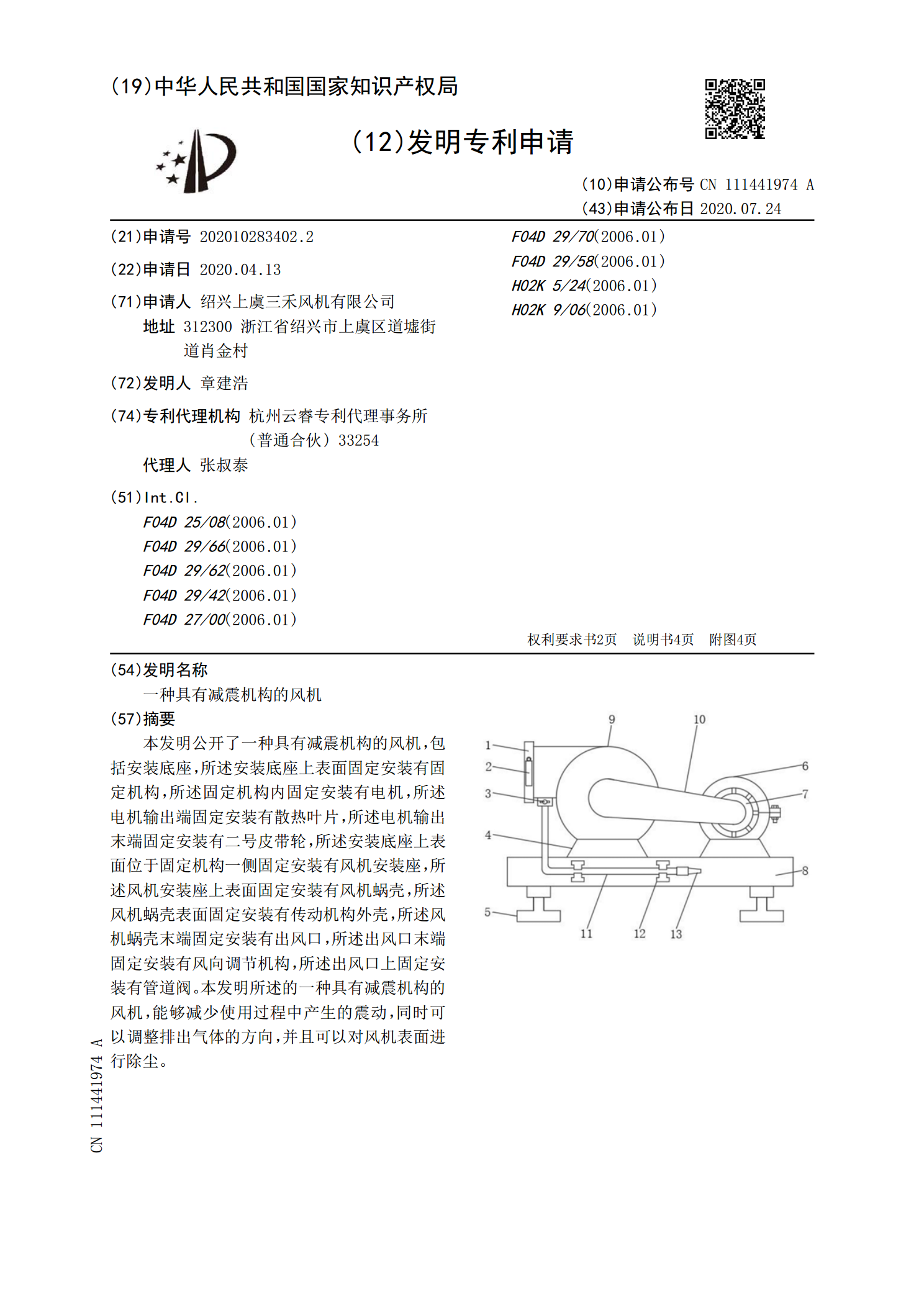
本发明公开了一种具有减震机构的风机,包括安装底座,所述安装底座上表面固定安装有固定机构,所述固定机构内固定安装有电机,所述电机输出端固定安装有散热叶片,所述电机输出末端固定安装有二号皮带轮,所述安装底座上表面位于固定机构一侧固定安装有风机安装座,所述风机安装座上表面固定安装有风机蜗壳,所述风机蜗壳表面固定安装有传动机构外壳,所述风机蜗壳末端固定安装有出风口,所述出风口末端固定安装有风向调节机构,所述出风口上固定安装有管道阀。本发明所述的一种具有减震机构的风机,能够减少使用过程中产生的震动,同时可以调整排出