
一种独立转向的驱动机构.pdf

秀华****魔王

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种独立转向的驱动机构.pdf
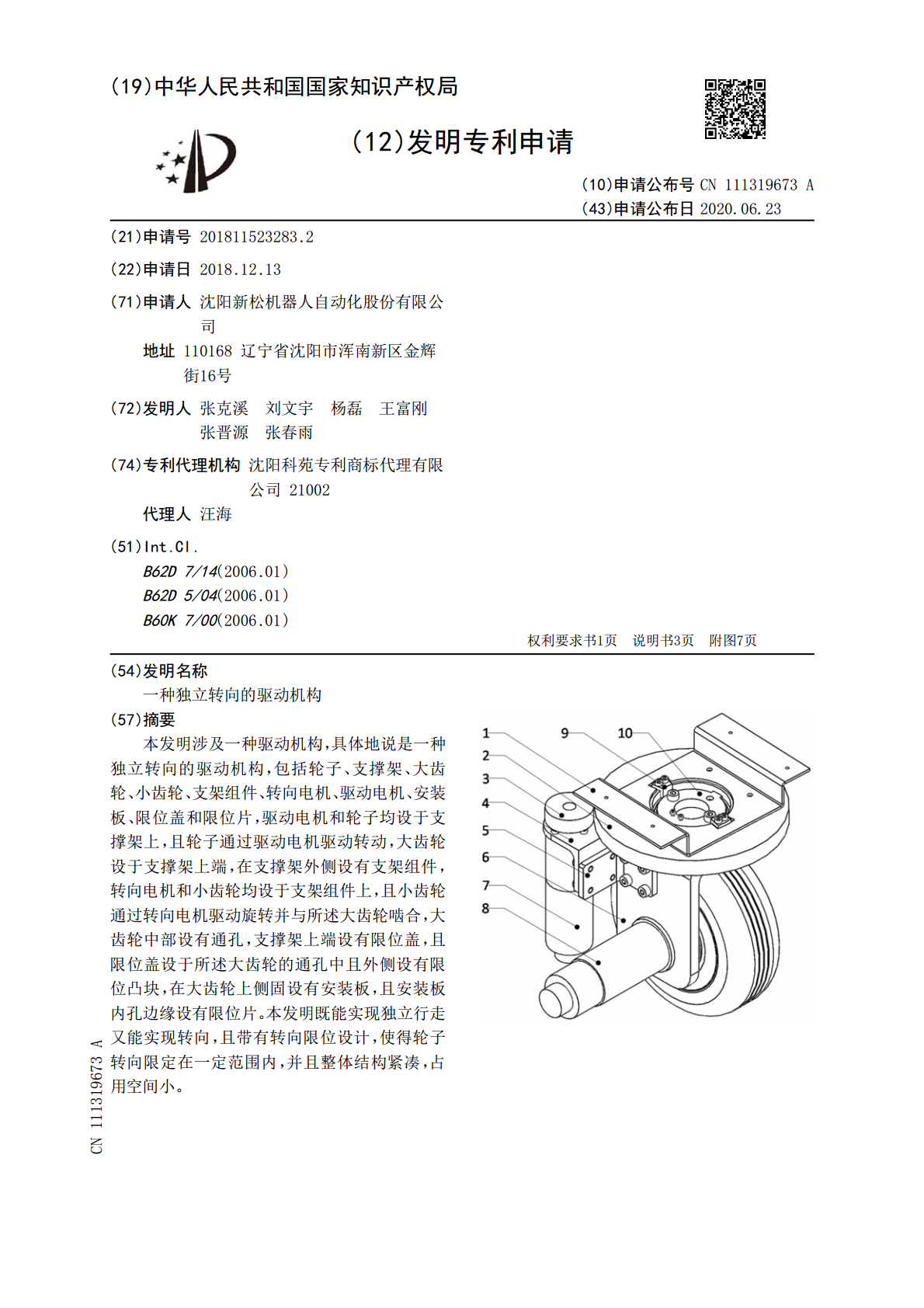
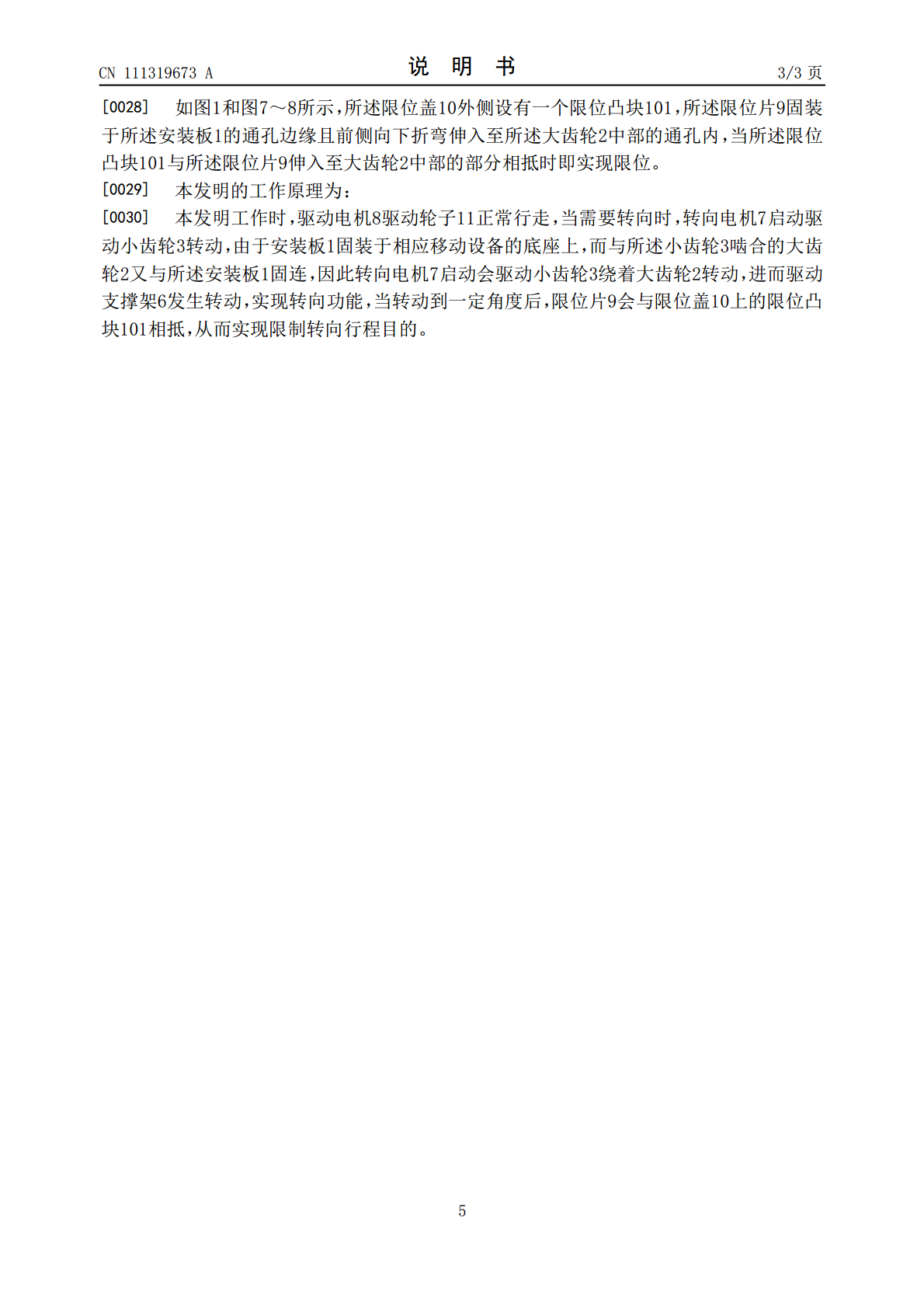
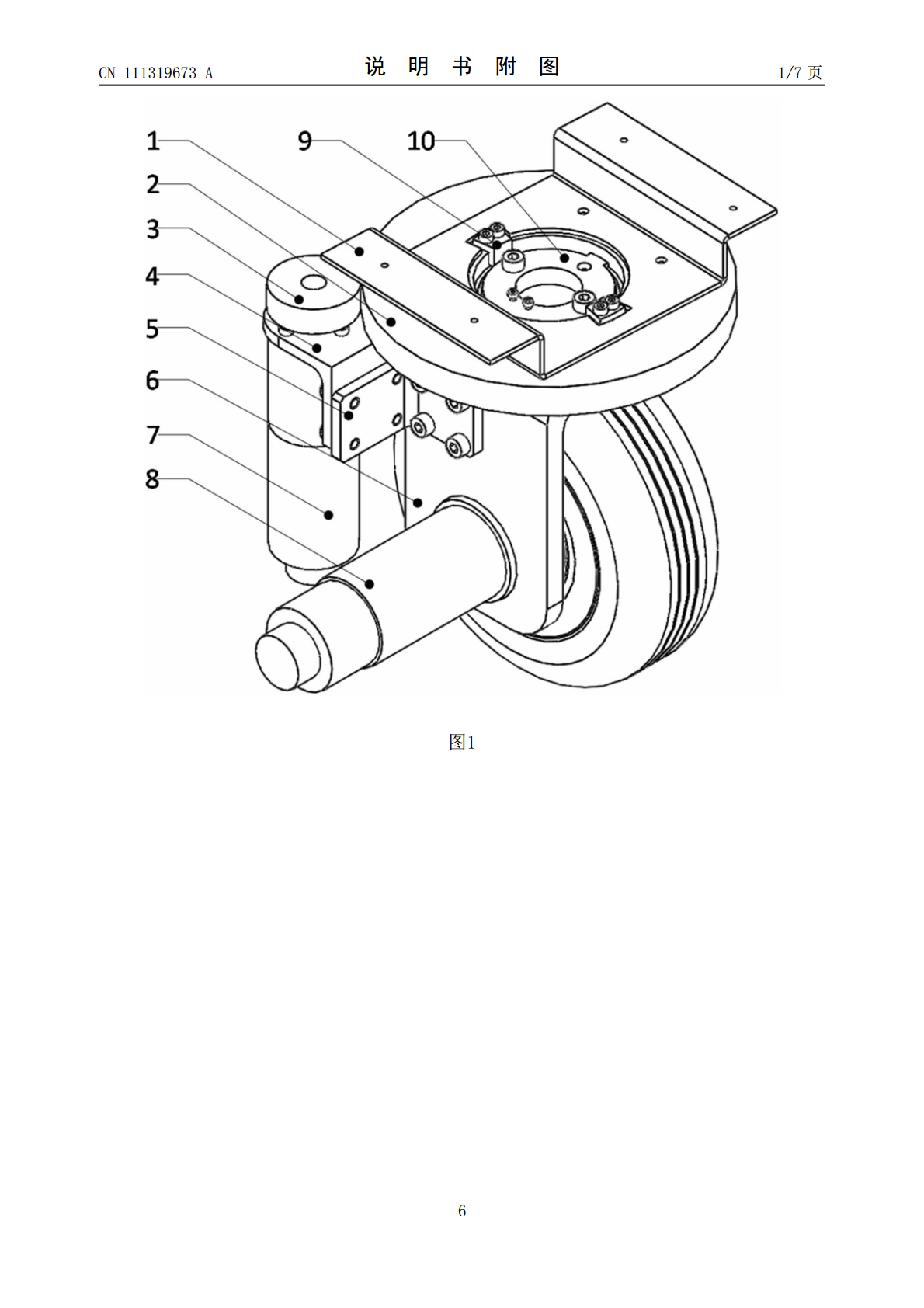
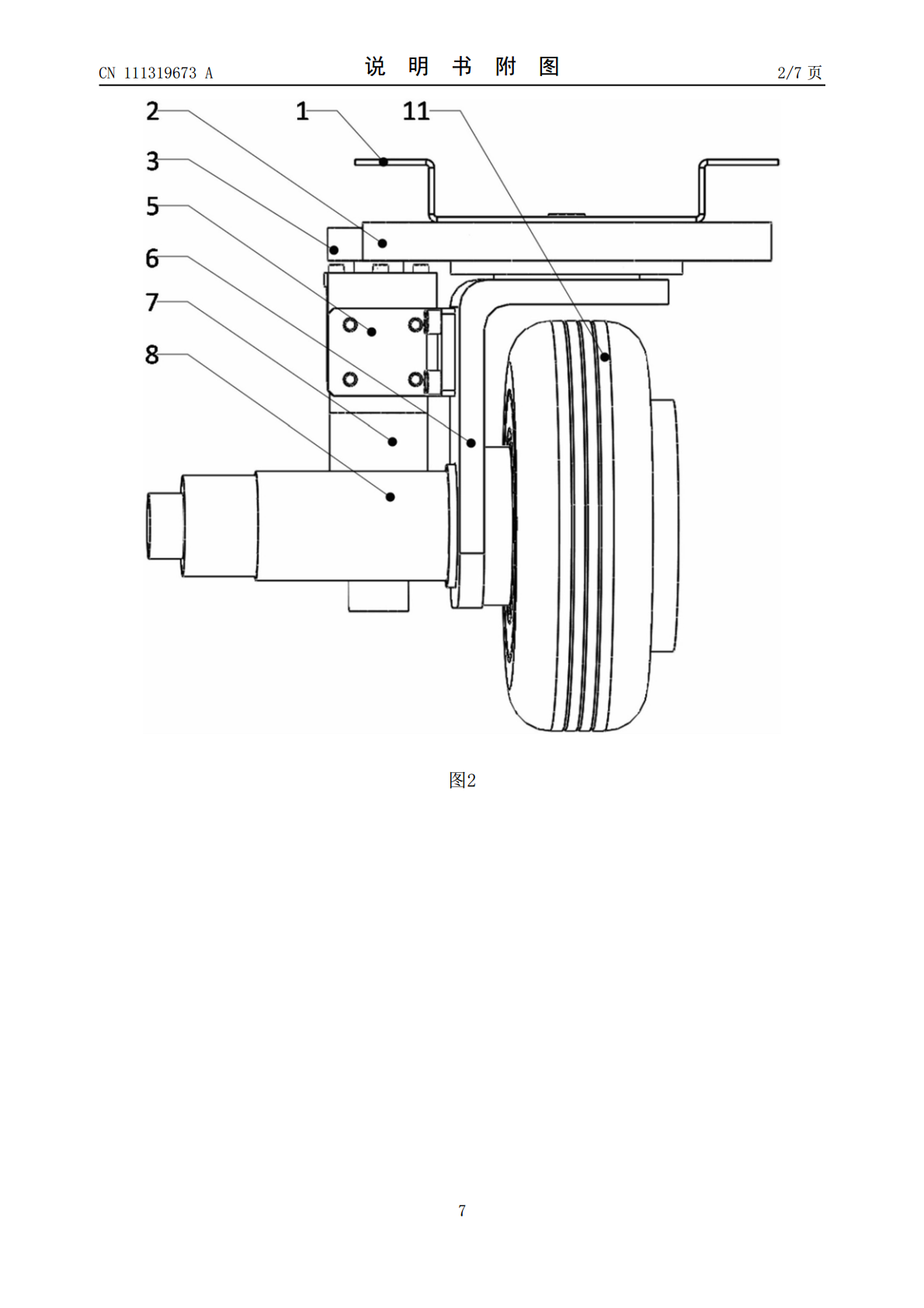
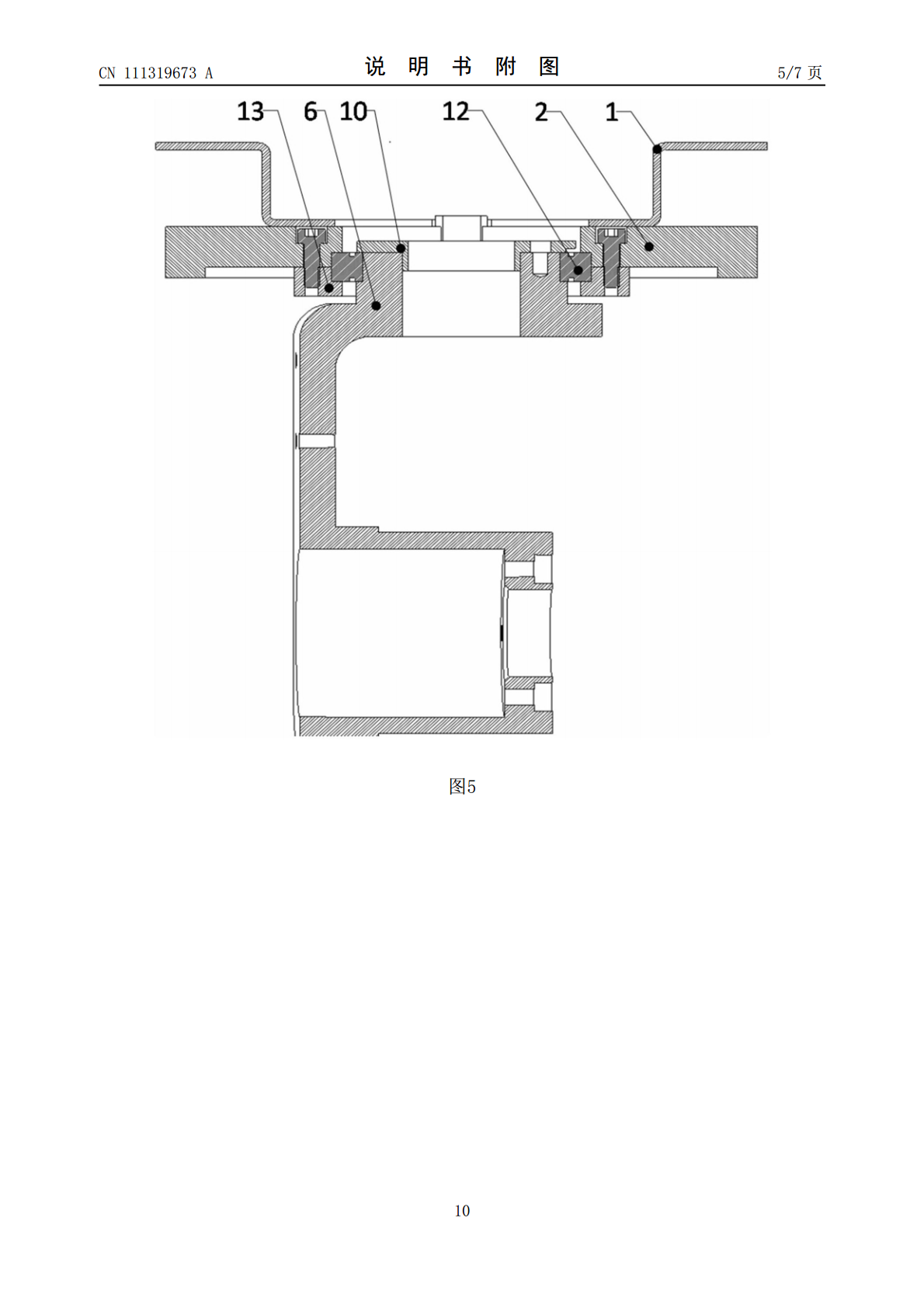
本发明涉及一种驱动机构,具体地说是一种独立转向的驱动机构,包括轮子、支撑架、大齿轮、小齿轮、支架组件、转向电机、驱动电机、安装板、限位盖和限位片,驱动电机和轮子均设于支撑架上,且轮子通过驱动电机驱动转动,大齿轮设于支撑架上端,在支撑架外侧设有支架组件,转向电机和小齿轮均设于支架组件上,且小齿轮通过转向电机驱动旋转并与所述大齿轮啮合,大齿轮中部设有通孔,支撑架上端设有限位盖,且限位盖设于所述大齿轮的通孔中且外侧设有限位凸块,在大齿轮上侧固设有安装板,且安装板内孔边缘设有限位片。本发明既能实现独立行走又能实现
一种基于多相电机驱动的线控独立转向执行机构.pdf
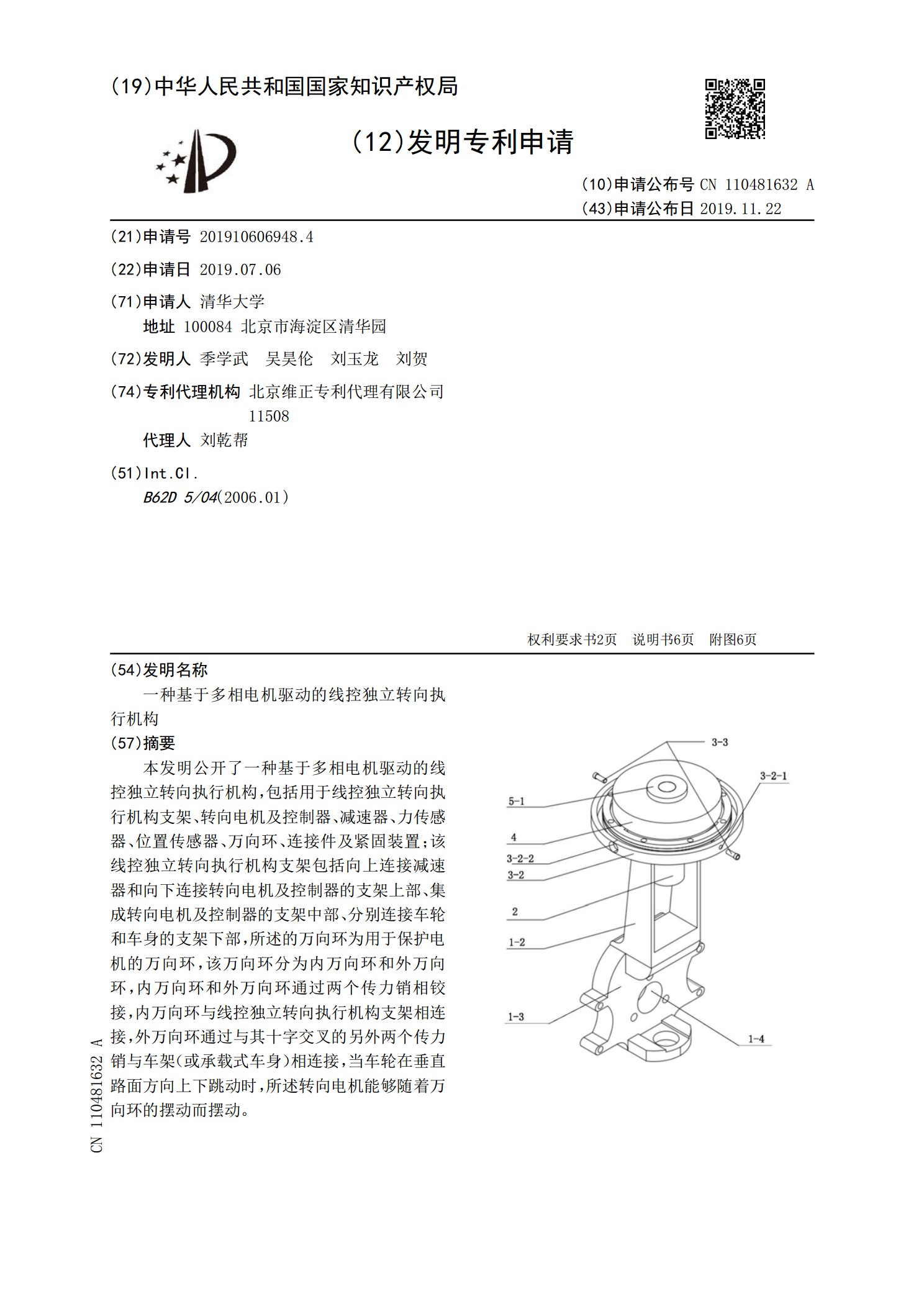
本发明公开了一种基于多相电机驱动的线控独立转向执行机构,包括用于线控独立转向执行机构支架、转向电机及控制器、减速器、力传感器、位置传感器、万向环、连接件及紧固装置;该线控独立转向执行机构支架包括向上连接减速器和向下连接转向电机及控制器的支架上部、集成转向电机及控制器的支架中部、分别连接车轮和车身的支架下部,所述的万向环为用于保护电机的万向环,该万向环分为内万向环和外万向环,内万向环和外万向环通过两个传力销相铰接,内万向环与线控独立转向执行机构支架相连接,外万向环通过与其十字交叉的另外两个传力销与车架(或承
一种独立转向机构及液压系统.pdf
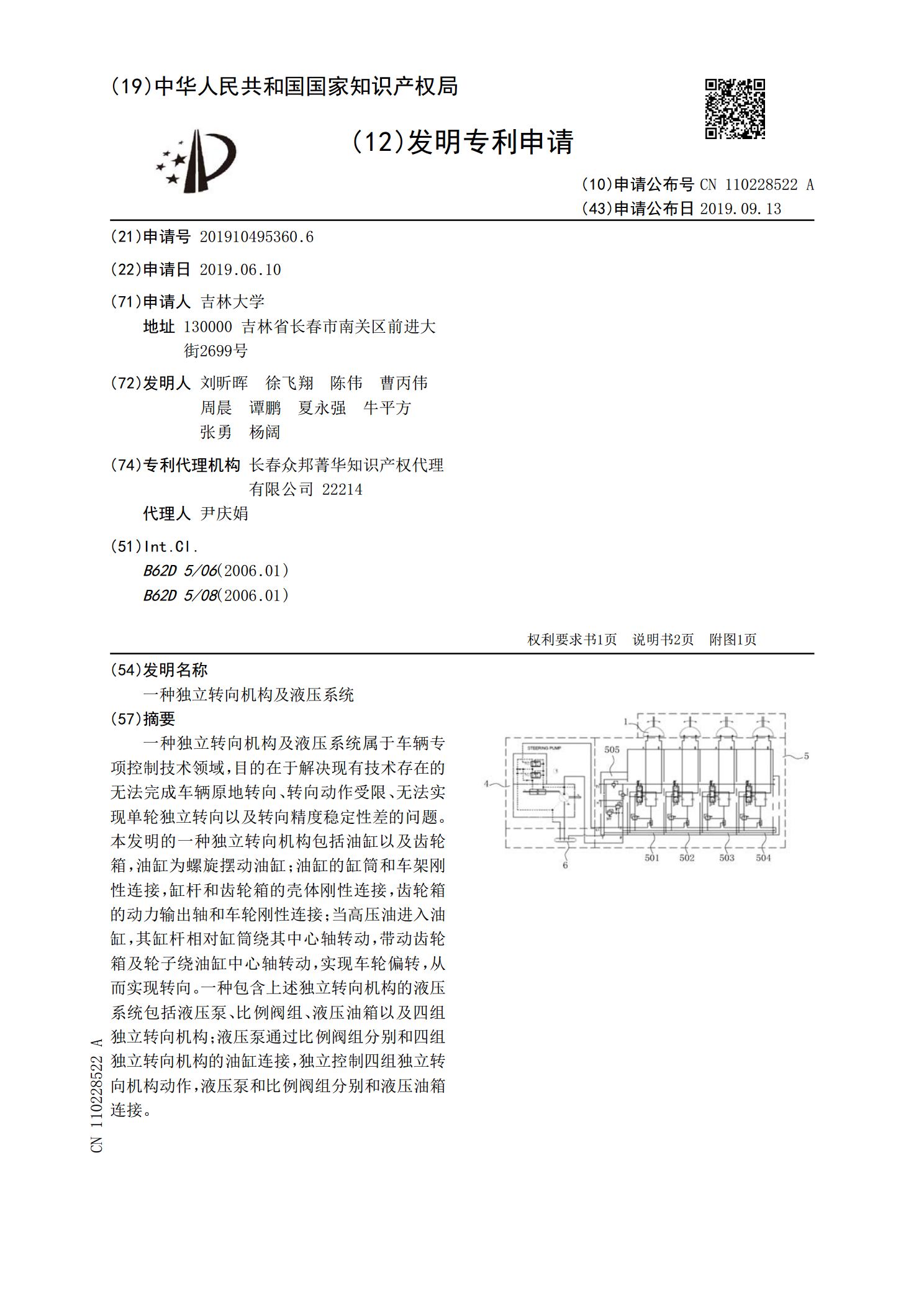
一种独立转向机构及液压系统属于车辆专项控制技术领域,目的在于解决现有技术存在的无法完成车辆原地转向、转向动作受限、无法实现单轮独立转向以及转向精度稳定性差的问题。本发明的一种独立转向机构包括油缸以及齿轮箱,油缸为螺旋摆动油缸;油缸的缸筒和车架刚性连接,缸杆和齿轮箱的壳体刚性连接,齿轮箱的动力输出轴和车轮刚性连接;当高压油进入油缸,其缸杆相对缸筒绕其中心轴转动,带动齿轮箱及轮子绕油缸中心轴转动,实现车轮偏转,从而实现转向。一种包含上述独立转向机构的液压系统包括液压泵、比例阀组、液压油箱以及四组独立转向机构;
一种四驱独立转向机构.pdf
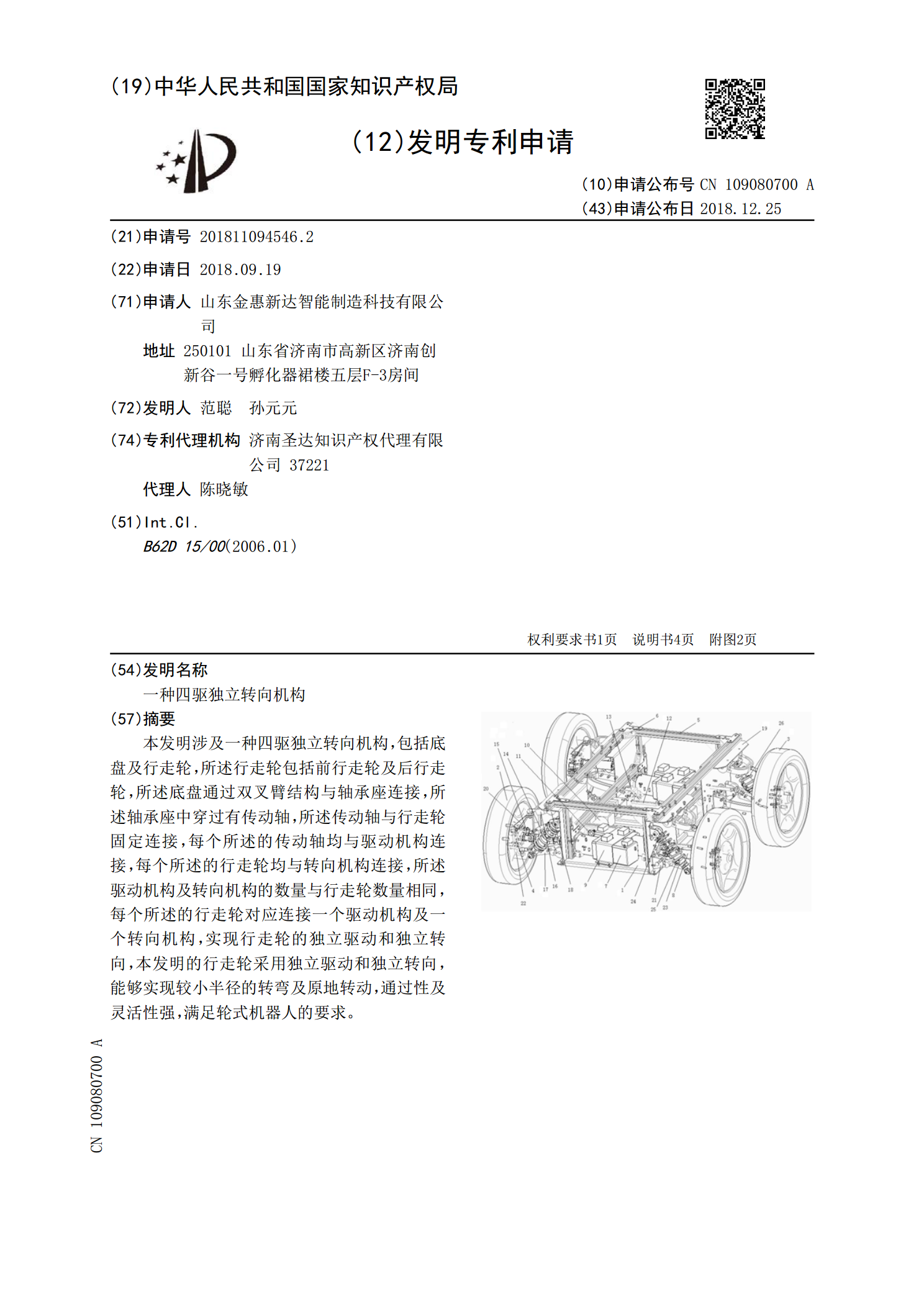
本发明涉及一种四驱独立转向机构,包括底盘及行走轮,所述行走轮包括前行走轮及后行走轮,所述底盘通过双叉臂结构与轴承座连接,所述轴承座中穿过有传动轴,所述传动轴与行走轮固定连接,每个所述的传动轴均与驱动机构连接,每个所述的行走轮均与转向机构连接,所述驱动机构及转向机构的数量与行走轮数量相同,每个所述的行走轮对应连接一个驱动机构及一个转向机构,实现行走轮的独立驱动和独立转向,本发明的行走轮采用独立驱动和独立转向,能够实现较小半径的转弯及原地转动,通过性及灵活性强,满足轮式机器人的要求。
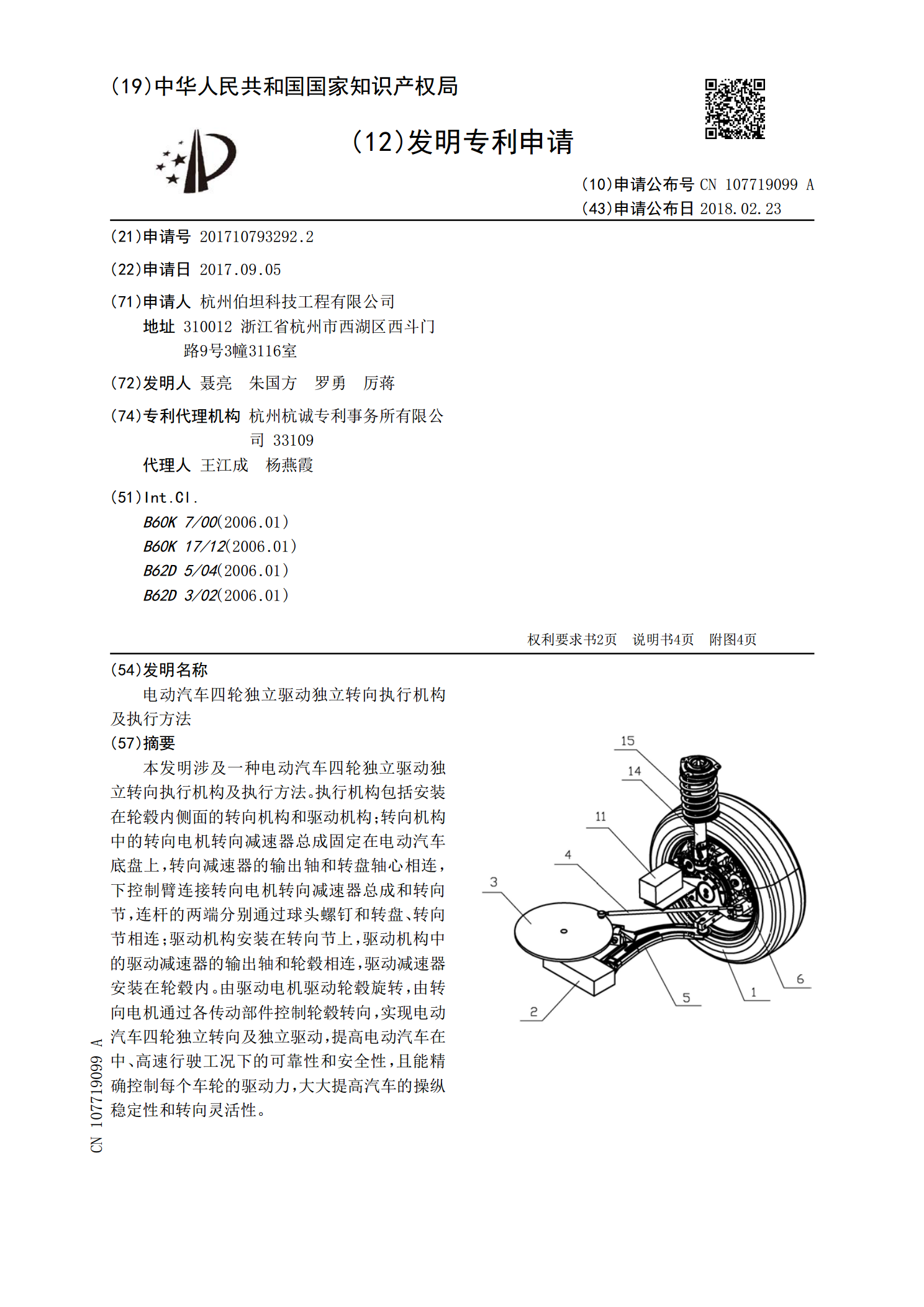
电动汽车四轮独立驱动独立转向执行机构及执行方法.pdf
本发明涉及一种电动汽车四轮独立驱动独立转向执行机构及执行方法。执行机构包括安装在轮毂内侧面的转向机构和驱动机构;转向机构中的转向电机转向减速器总成固定在电动汽车底盘上,转向减速器的输出轴和转盘轴心相连,下控制臂连接转向电机转向减速器总成和转向节,连杆的两端分别通过球头螺钉和转盘、转向节相连;驱动机构安装在转向节上,驱动机构中的驱动减速器的输出轴和轮毂相连,驱动减速器安装在轮毂内。由驱动电机驱动轮毂旋转,由转向电机通过各传动部件控制轮毂转向,实现电动汽车四轮独立转向及独立驱动,提高电动汽车在中、高速行驶工况