
一种快速反向装置以及快速轨道反向装置.pdf

是你****松呀


1/10

2/10
3/10

4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种快速反向装置以及快速轨道反向装置.pdf
本发明适用于轨道机器人技术领域,提供了一种快速反向装置以及快速轨道反向装置,包括机架,机架上转动连接有行走机构;行走机构,行走机构至少包括转动轮系,驱动装置和固定框架,转动轮系安装于固定框架,转动轮系包括第一方向行走轮和第二方向行走轮,驱动装置用于驱动转动轮系转动,第一方向行走轮与第二方向行走轮转动方向相反;以及反向机构,反向机构与机架和行走机构连接,用于通过驱动行走机构相对行走平面摆动,切换第一方向行走轮或第二方向行走轮与行走平面接触,来改变行走机构在行走平面上的移动方向,解决了轨道机器人在反向运动时响
一种焊带的反向镀锡装置及反向镀锡方法.pdf
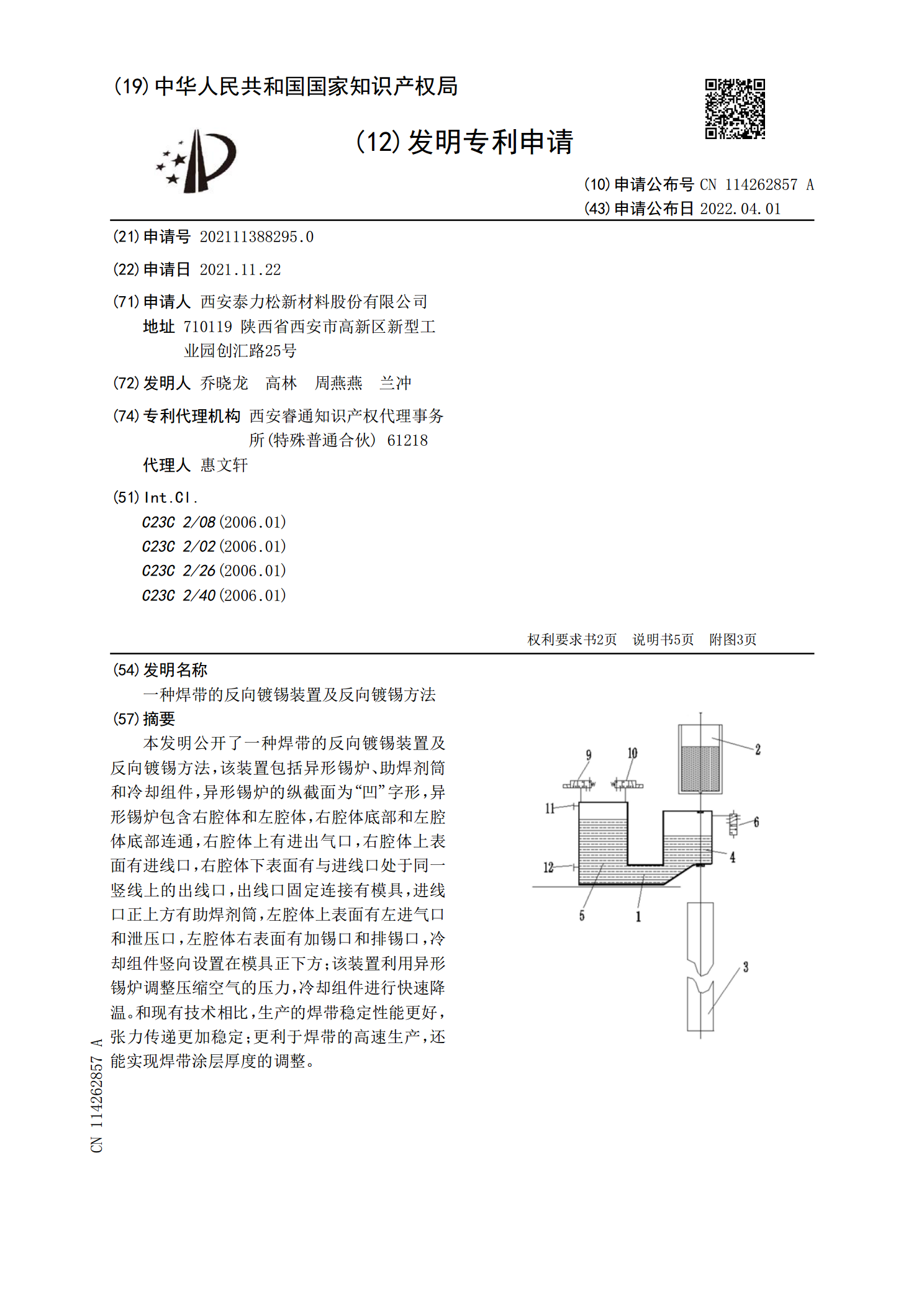
本发明公开了一种焊带的反向镀锡装置及反向镀锡方法,该装置包括异形锡炉、助焊剂筒和冷却组件,异形锡炉的纵截面为“凹”字形,异形锡炉包含右腔体和左腔体,右腔体底部和左腔体底部连通,右腔体上有进出气口,右腔体上表面有进线口,右腔体下表面有与进线口处于同一竖线上的出线口,出线口固定连接有模具,进线口正上方有助焊剂筒,左腔体上表面有左进气口和泄压口,左腔体右表面有加锡口和排锡口,冷却组件竖向设置在模具正下方;该装置利用异形锡炉调整压缩空气的压力,冷却组件进行快速降温。和现有技术相比,生产的焊带稳定性能更好,张力传递

推力反向装置.pdf
本发明涉及一种涡轮喷气发动机机舱的推力反向装置(10),所述装置包括安装成能够沿基本平行于所述机舱的纵向轴线的方向平移的至少一个罩(20),该可活动罩与至少一个挡板(30)相关联,所述挡板安装成使其能通过一端在所述活动罩上枢转,所述挡板装备有至少一个驱动机构,所述驱动机构包括至少一个形成杠杆(50)的组件,所述杠杆(50)安装成能够在所述罩(20)上枢转,并在其每一端处,通过驱动连杆(51、52),分别铰接在所述挡板和所述装置的固定结构上,其特征在于,所述形成杠杆的组件和相关联的连杆铰接在基本上垂直于所述
推力反向装置.pdf
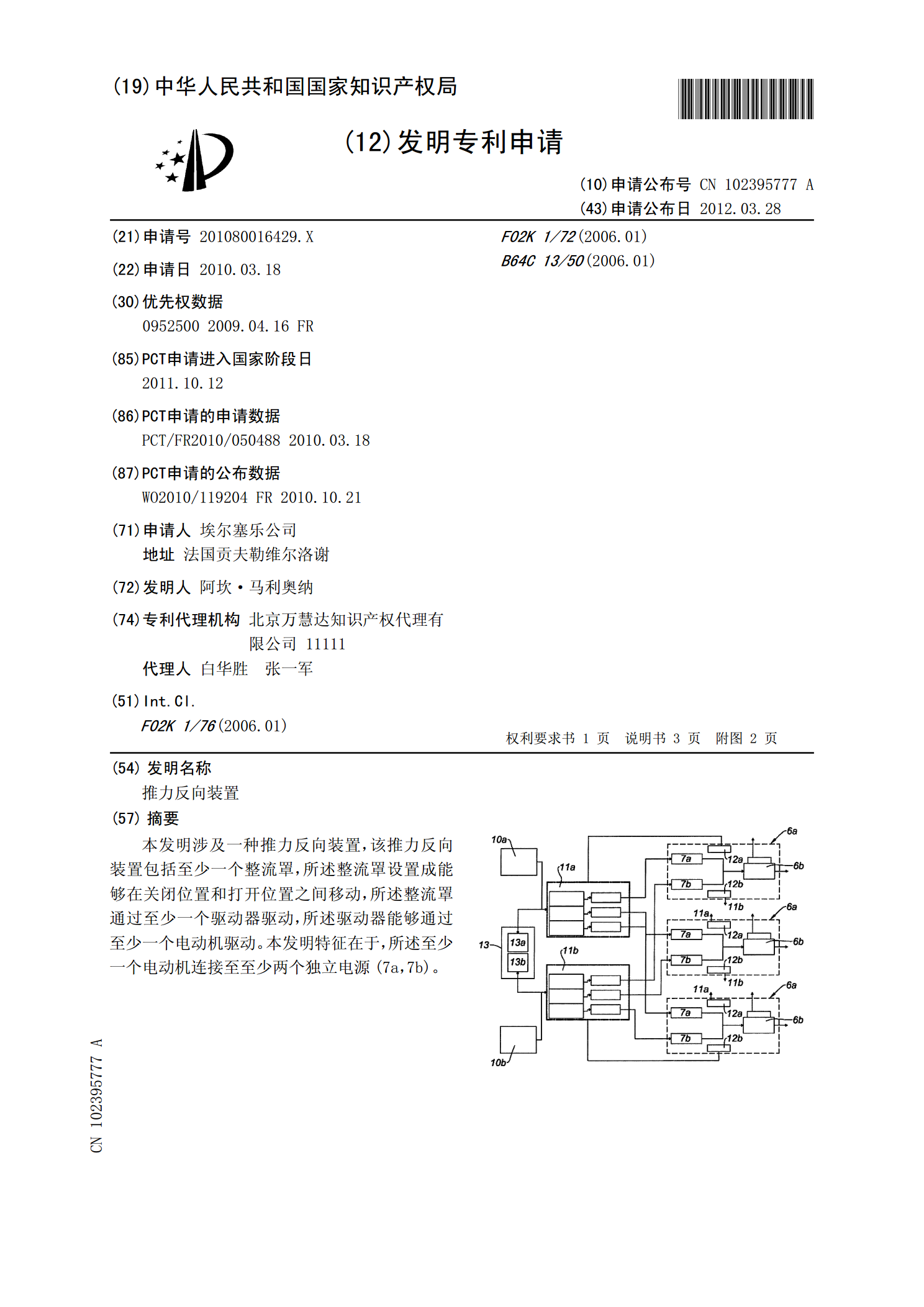
本发明涉及一种推力反向装置,该推力反向装置包括至少一个整流罩,所述整流罩设置成能够在关闭位置和打开位置之间移动,所述整流罩通过至少一个驱动器驱动,所述驱动器能够通过至少一个电动机驱动。本发明特征在于,所述至少一个电动机连接至至少两个独立电源(7a,7b)。

推力反向装置.pdf
本发明涉及一种用于涡轮喷气发动机机舱的推力反向装置(1),其特征在于:(i)可活动整流罩(3)上设有至少一个驱动引导螺杆(30),驱动引导螺杆(30)在其长度的至少一部分上具有至少一个外部凹槽,由此所述凹槽可以与发动机舱的固定导向装置(31)接合,用以在可活动整流罩的平移运动中旋转所述引导螺杆;(ii)所述引导螺杆连接至至少一个装置(32、35、36),该装置用于将其旋转运动向挡板的至少一个驱动系统(33、34、25)传递。